Известны устройства для перегрузки штучного груза с верхней ветви конвейера на нижнюю, которые содержат передающий механизм, установленный за концевым барабаном конвейера, и гравитационную роликовую секцию.
Отличием предлагаемого устройства является то, что передающий механизм выиолнен в виде каретки, которая снабжена роликами, передающими груз. Одним концом каретка жестко закреплена на втулке, охватывающей направляющую. Втулка шарнирно соединена со штоком пневмоцилиндра для перемещения каретки в сторону роликовой секции. В нижней части рамы каретки жестко закреилен следящий ролик, который взаимодействует с копиром, размещенным под кареткой для изменения ее угла наклона. На свободном конце каретки смонтирован стопор со следящим роликом, который взаимодействует с копиром, размещенным под кареткой.
Такое выполнение устройства обеспечивает автоматизацию перегрузки щтучного груза.
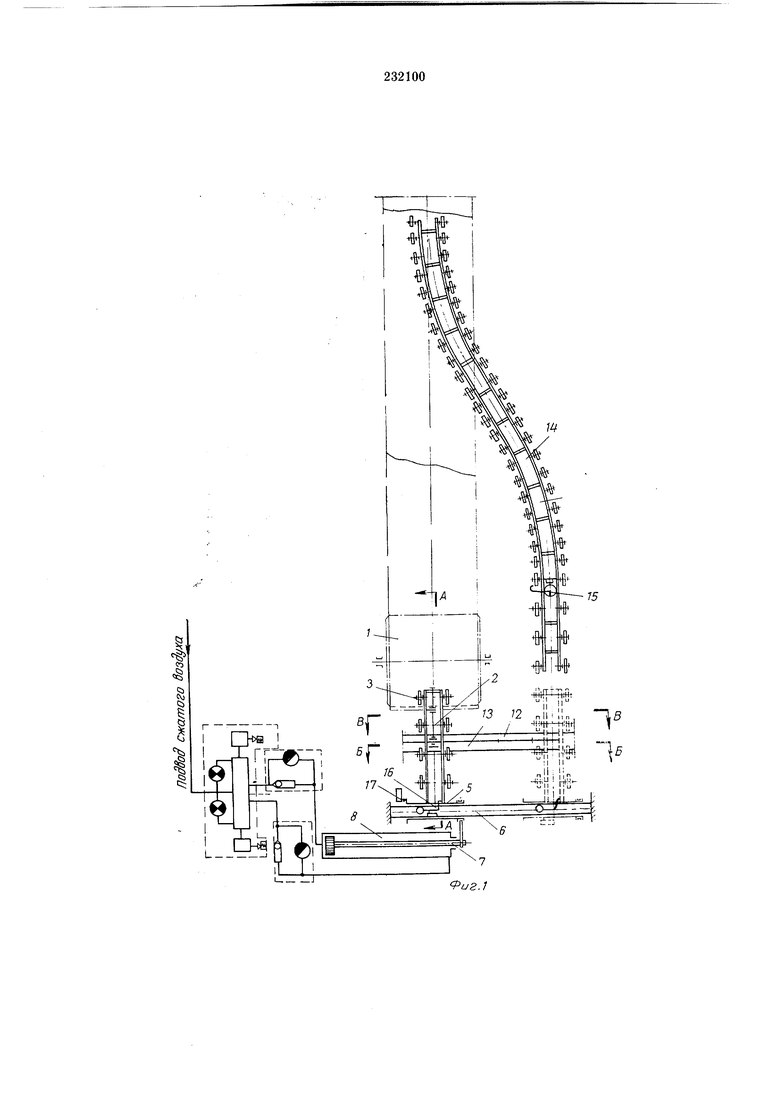
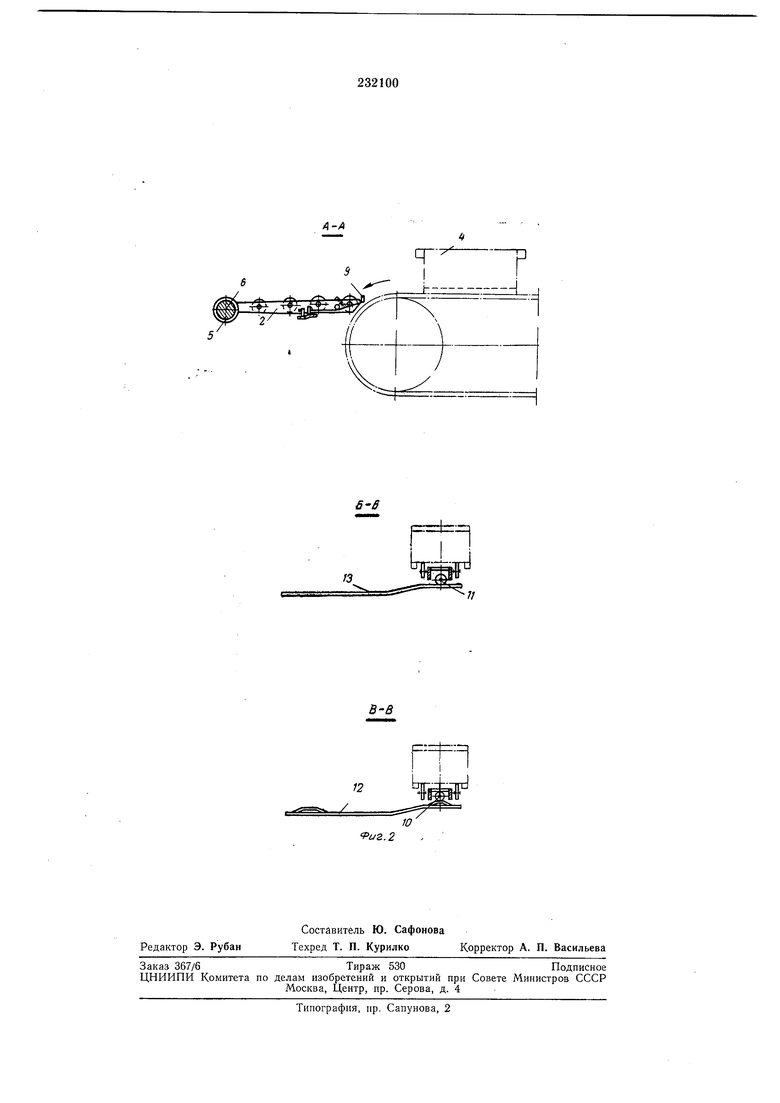
На фиг. 1 изображено предлагаемое устройство в общем виде; на фиг. 2 - разрезы по А А, Б -Б и В -В на фиг. 1.
втулке 5, которая охватывает направляющую 6 и шарнирно соединена со штоком 7 пневмоцилиндра 8 ириводного устройства каретки. На свободном конце каретки установлен стопор 9, на котором закреилен следящий ролик 10. В нижней части каретки смонтирован следящий ролик 11. Под кареткой установлены копиры 12 и 13, в конце которых размещена роликовая секция 14. В начале этой секции
установлен датчик 15. На направляющей 6 установлены датчики 16 и 17.
Тара с грузом 4 в конце конвейера сходит с его верхней ветви и набегает на каретку 2. Каретка в исходном положении наклонена на
2-3° к горизонтальной плоскости, что способствует набеганию тары на каретку.
Направляющие, имеющиеся на таре, направляют ее по роликам 3 каретки. Тара, набежавшая на каретку, нал имает на флажок
датчика 16. Датчик дает сигнал приводному устройству, под действием которого воздух подается в левую полость пневмоцилиндра 8. Шток 7, шарнпрно связанный .с кареткой, перемещается в крайнее правое положение. Во
время этого перемещения происходит изменение угла наклона каретки к горизонтальной плоскости посредством коппра 13, по которому движется ролик 11. Каретка в крайнем правом положении л роликовая секция наклонечто обеспечивает гравитационное движение тары с грузом. Тара с грузом во время перемещения каретки поддерживается стопором 9, который предотвращает ее сход с каретки. В начале движения каретки стопор подхватывает тару и в конце хода освобождает вследствие взаимодействия ролика 10 с копиром 12. Тара под действием собственного веса движется по роликовой секции и выходит на нижнюю ветвь конвейера. Во время движения тары по роликовой секции срабатывает датчик 15, который дает сигнал приводному устройству. Под действием последнего воздух подается в правую полость пневмоцилиндра и каретка возвращается в исходное положение, при котором срабатывает датчик 17, разрешающий выпуск следующей тары с рабочих мест.
Предмет изобретения
1. Устройство для перегрузки штучного груза с верхней ветви конвейера на нижнюю,
включающее в себя установленный за концевым барабаном конвейера передающий механизм и гравитационную роликовую секцию, отличающееся тем, что, с целью автоматизации перегрузки груза, передающий механизм выполнен в виде снабженной поддерживающими груз роликами каретки, одним концом жестко закрепленной на втулке, охватывающей направляющую и шарнирно соединенной со штоком пневмоцилиндра для перемещения каретки.
2.Устройство по п. 1, отличающееся тем, что, с целью изменения угла наклона каретки, в нижней части рамы ее жестко закреплен следящий ролик, взаимодействующий с копиром, размещенным под кареткой.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью фиксации груза на каретке при ее движении, на свободном конце каретки установлен стопор, снабженный следящим роликом, взаимодействующим с копиром, размещенным под кареткой.
7
fuz.l
| название | год | авторы | номер документа |
|---|---|---|---|
| Перегрузочное устройство для штучных грузов | 1977 |
|
SU701896A1 |
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Конвейер для несинхронной сборки | 1989 |
|
SU1728097A1 |
| Полуавтомат герметизации полупроводниковых приборов контактной сваркой | 1988 |
|
SU1590290A2 |
| Роликовый конвейер | 1984 |
|
SU1392001A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Склад для штучных грузов | 1972 |
|
SU501939A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Приемно-передаточное устройство для линии металлообработки | 1984 |
|
SU1192946A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
13
