Известны станки-нолуавтоматы для полирования изделий тииа клинков садовых ножей, содержащие расиоложенные на станнне бабку изделия с горизонтальным шпинделем, на котором закреилеи патрон изделия, и полировальные бабки е круга.ми для работы периферией.
Описываемый станок-полуавтомат отличается от извеетных тем, что, с целью упрощения конструкции и повыщения качества обработки в нем патрон изделия выполнен в виде диска с расиоложе-ннымиПО торцам скалками и упругими кольцами, на которые свободно опираются присиособления для ирепления изделий, установленные на екалках е зазором, обеспечивающие уетановку изделий в процеесе обработки таким образом, чтобы ,их обрабатывае.1ая поверхность была касатель-на к периферии полировального круга. Для обеспечения обработки поверхности изделий по веей щирине, устранения прижогов и увеличения производительности в станке-полуавтомате патрон изделия может быть выполнен двуеторонним с расположением -на каждом торце по окружности нескольких приспособлений с закрепленными в них изделиями, причем привод патрона может осуществляться от электродвигателя через клиноременную и червячную передачи. Для предохранения изделий от выпадания при обработке приспособления етанка-полуавтомата для их cpiiKcamii; могут оыть выполнены Б виде двух соединенных между собой осью планок, на одной из которых имеется паз для 1зделия, на другой - нгла, и пр 1жаты упругими кольцами к yпopa.i. закреп,1енньп1 на диске патрона ;1здел 1я. Принудительное раздвижеiine планок каждого приспособления может быть обеспечено те.м. что внутри патрона изделия в каждой из двух плоскоетей, проходящих между планками приспособлений, концентрично на подшипниках установлено по одному круглому кулаку, могущему перемещаться в зоны 3arfp 3Kii или выгрузк изделий посредством сдвоенного гидрощглиндра.
5
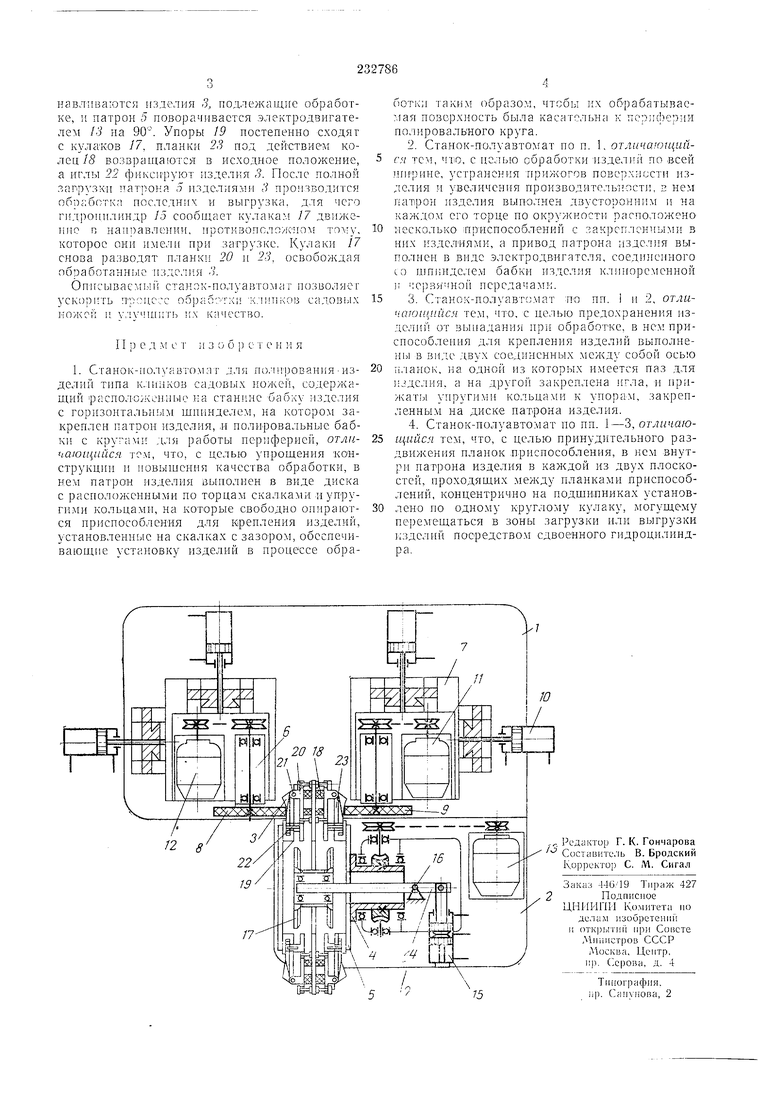
Па чертеже схематически изобрал ен предлагаемый станок-полуавтомат.
Станок-иолуавтомат содержит станину /, бабку 2 изделия 3 с горизонта.тьным шпинделем 4, на которо, закреплен патрон J изде0лия 3, ио.тировальные бабю (J и 7 с кругами 8 и 9, гидропрпвод W и электродвигатели
;/-/5.
Для загрузки изделий 3 в станок-полуавтомат рычаг 14 поворачивается сдвоенным ги5дроцилиндром /5 отноеительно оси 16 и подает круглые кулаки 17, которые, преодолевая еопротивление упругих колец 18, нажимают на упоры 19 поворачивают планки 20 относительно осей 21. При этом иглы 22 планок 20 выходят из пазов планок 23, после ч&го уста