Известны автооператоры с перемещением изделия путем движения непосредственно поворотной оси, на которой закреплены «руки автооператора.
Предложенный автооператор отличается тем, что сочленение одного из захватов стержнем выполнено шарнирным и корпус захвата снабжен копиром, взаимодействующим с рычагом, шарнирно укрепленным на захвате.
Это обеспечивает совмещение вывода одной детали на уровень центров станка и захвата другой детали, расположенной вне линии центров.
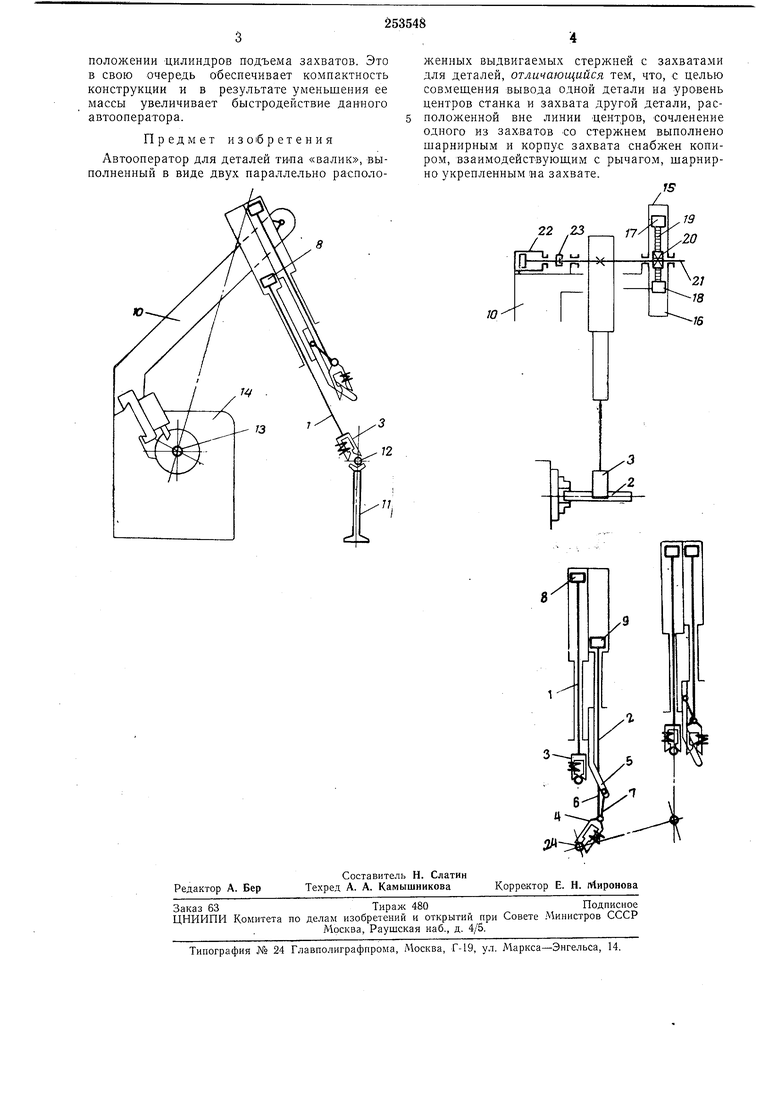
На чертеже показан предложенный автооператор в разных положениях.
Автооператор для деталей типа «валик выполнен в виде двух параллельно расположенных выдвигаемых стержней / и захватами Зн4.
Захват 4 шарнирно сочленен со стержнем 2 и корпус захвата 4 копиром 5, взаимодействующим с роликом 6 поворотного рычага 7, установленного на захвате 4.
Стержни 1 и 2 представляют собой щтоки поршней 8 и 9 гидроцилиндров, смонтированных в кронштейне 10.
При расположении автооператора над транспортером 11 заготовка 12 берется из его лотка захватом 3, -сидящим на стержне (штоке) / поршня 8 гидроцилиндра, который поднимает ее в верхнее транспортное положение. После этого автооператор, расположенный в кронштейне 10, поворачивается и подносит
заготовку к шпинделю JS станка -14. Автооператор поворачивается плунжерными гидроцилиндрами 15 и 16, поршни 17 и 18 которых перемещают рейку 19, поворачивающую шестерню 20, сидящую на валу 21 на подвижной шпонке. При необходимости осуществить осевое перемещение заготовки 12, например, для установки в патрон вала 21, на котором закреплен гидроцилиндр захвата 3, сообщается осевое перемещение при помощи гидроцилиндра 22, закрепленного на кронштейне 10. Шток гидроцилиндра 22 связан с валом 21 поворотной муфтой 23.
При расположении автооператора над станком поворотный захват 4, сидящий на стержне (штоке) 2 поршня 9 гпдроцилиндра, при снятии изделия 24 перемещается вниз. При этом шарнмрно соединенный с захватом 4 рычаг 7 с роликом 6, который скользит по пазу копира 5, поворачивает захват 4 до совпадения с осью изделия 24, которое берется захватом 4, и стержень (шток) 2 возвращается в верхнее положение. Поворот захвата 4 относительно стержня (штока) 2 позволяет брать и устанавливать заготовку и изделие на
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| АВТООПЕРАТОР | 1972 |
|
SU344960A1 |
| ПЕРЕНАЛАЖИВАЕМОЕ УСТРОЙСТВО С ПРОГРАММНЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИЗАГОТОВОК | 1969 |
|
SU246290A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Загрузочно-разгрузочное устройство | 1970 |
|
SU318263A1 |
| АГРЕГАТ ДЛЯ ЗАКАЛКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU330203A1 |
