Известен токарный автомат для обработки отверстий, содержащий станину с порталом, шпиндельный блок с приводом вращения шпинделей, механизмы ориентации и зажима заготовок, механизм их переноса с поворотной траверсой, механизм загрузки и выгрузки, а также загрузочный и разгрузочный лотки. Автомат не позволяет совместить операции раскатки шлицев в отверстии « расточки канавки по этим шлицам, что снижает производительность обработки.
Предложенный автомат отличается от известного тем, что его поворотная траверса снабжена подпружиненными рычагами-вилками для удерживания заготовок в процессе их центрирования и обработки, а механизмы ориентации и центрирования снабжены самоустанавливаюшимися конусными ловителями, утапливаюшимися после ориентации заготовок в скалки, служащие для центрирования и зажима заготовок, причем механизм загрузки и выгрузки выполнен в виде зубчатых рейки и колеса, на валу которого установлены два рычага с собачками, складывающимися в двух взаимно перпенидуклярных направлениях.
Такое выполнение автомата повышает его производительность путем совмещения операций раскатки шлицов в отверстии и расточки канавки по этим шлицам.
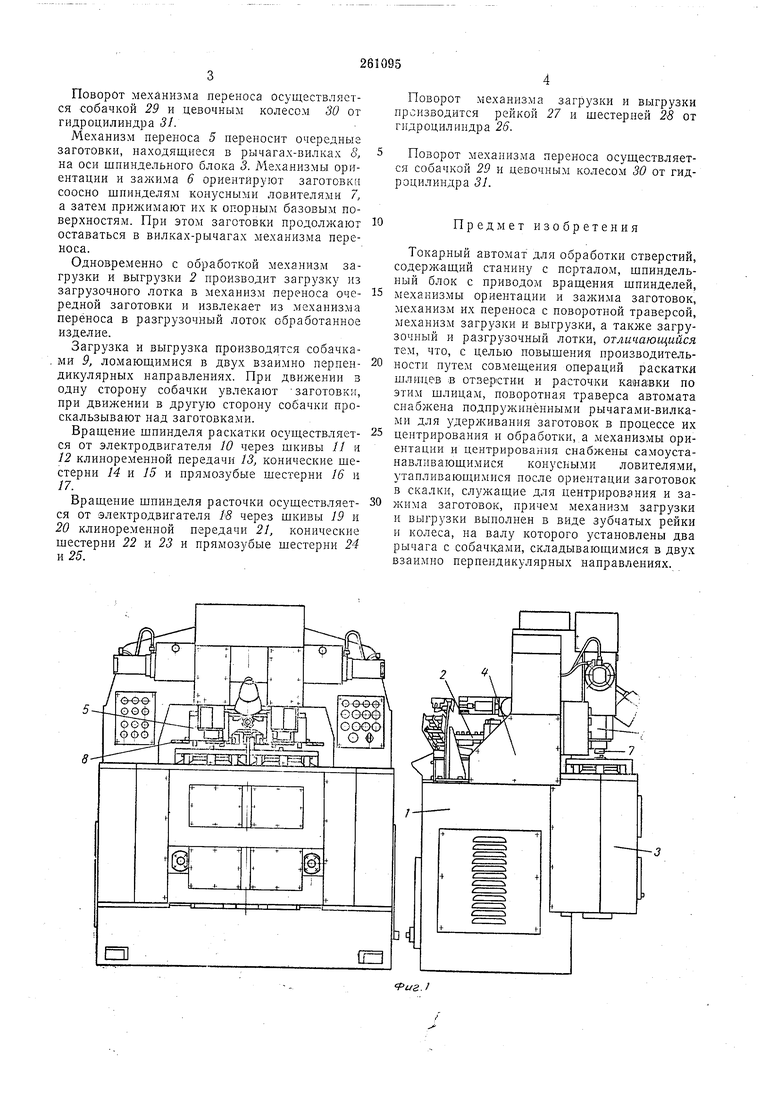
мый автомат, общий вид; на фиг. 2 - кинематическая схема автомата; на фиг. 3 - кинематическая схема механизмов загрузки, выгрузки и переноса заготовок.
На станине 1 автомата установлен механизм загрузки и выгрузки заготовок 2, шпиндельный блок 3, на котором осуществляется раскатка шлицов и расточка канавки, и портал 4. На последнем укреплен механизм переноса 5 и механизмы ориентации и зажима 6. Механизмы ориентации и зажима 6 снабжены самоустанавливающимися конусными ловителями 7. Шпиндельный блок установлен соосно механизмам ориентации и зажима.
Механизм переноса представляет собой траверсу с шестью рычагами-вилками 8. На рычагах вала .механизм загрузки и выгрузки установлены собачки 9, которые имеют возмож«ОСть ломаться в двух взаимно перлендикулярных .направлениях.
Шпиндель раскатки связан с электродвигателем 10 через шкивы 11 и 12, клиноременную передачу 13, конические шестерни 14 vi 15 -л шестерни 16 и 17. Шпиндель расточки связан с электродвигателем 18 через шкивы 19 и 20, клиноременную передачу 21, конические шестерни 22 и 23 W. шестерни 24 и 25.
Поворот механизма переноса осуществляется собачкой 29 и цевочным колесом 30 от гидроцилиндра 31.
Механизм переноса 5 переносит очередные заготовки, находящнеся в рычагах-вилках S, на оси шпиндельного блока 3. Механизмы ориентации и зажима 6 ориентируют заготовки соосно шпинделям конусными ловителями л а затем прилсимают их к опорным базовым поверхностям. При этом заготовки продолжают оставаться в вилках-рычагах механизма переноса.
Одновременно с обработкой механизм загрузки и выгрузки 2 производит загрузку из загрузочного лотка в механизм переноса очередной заготовки и извлекает из механизма переноса в разгрузочный лоток обработанное изделие.
Загрузка и выгрузка производятся собачка. ми 9, ломающимися в двух взаимно перпендикулярных направлениях. При движении в одну сторону собачки увлекают заготовки, при движении в другую сторону собачки проскальзывают над заготовками.
Вращение шпинделя раскатки осуществляется от электродвигателя 10 через щкивы 11 ш 12 клиноременной передачи 13, конические шестерни 14 и 15 и прямозубые шестерни 16 и 17.
Вращение шпинделя расточки осуществляется от электродвигателя М через шкивы 19 и 20 клиноременной передачи 21, конические шестерни 22 я 23 и прямозубые шестерни 24 и 25.
Поворот механизма загрузки и выгрузки производится рейкой 27 и шестерней 28 от гидроцилиндра 26.
Поворот механизма переноса осуществляется собачкой 29 и цевочным колесом 30 от гидроцилиндра 31.
Предмет изобретения
Токарный автомат для обработки отверстий, содержащий станину с порталом, щпиндельный блок с приводом вращения шпинделей, механизмы ориентации и зажима заготовок, механизм их переноса с поворотной траверсой, механизм загрузки и выгрузки, а также загрузочный и разгрузочный лотки, отличающийся тем, что, с целью повышения производительности путем совмещения операций раскаткя шлицев в отверстии и расточки каиавки по этим шлицам, поворотная траверса автомата снабжена подпружиненными рычагами-вилками для задерживания заготовок в процессе их 5 центрирования и обработки, а механизмы ориентации и центрирования снабжены самоустанавливаюшимися конусрхыми ловителями, утапливающимися после ориентации заготовок в скалки, служащие для центрирования к зажима заготовок, причем механизм загрузки и выгрузки выполнен в виде зубчатых рейки и колеса, на валу которого установлены два рычага с собачками, складывающимися в двух взаимно перпендикулярных направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПАКЕТИРОВАНИЯ ВЗРЫВНЫХ ПАТРОНОВ | 1966 |
|
SU185726A1 |
| Токарно-револьверный автомат | 1974 |
|
SU663487A1 |
| Автоматический станок для фрезерования шлицев | 1977 |
|
SU677830A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| РАБОЧИЙ РОТОР ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1973 |
|
SU361858A1 |
| АБРАЗИВНО-ОТРЕЗНОЙ ПОЛУАВТОМАТ | 1971 |
|
SU306689A1 |
| Эмалировочный автомат | 1961 |
|
SU148319A1 |
| Полуавтомат для обработки пазов | 1979 |
|
SU770681A1 |
| АВТОМАТ ДЛЯ НАРЕЗКИ ВИНТОВОЙ КАНАВКИ | 1969 |
|
SU237619A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |

