,1
Изобретение относится к управляющим устройствам замкнутых систем с кусочно-постоянным управлением, которые формируют управляющий сигнал, обеспечивающий изменение знака управляющего воздействия при состояниях системы, определяемых в фазовом пространстве гиперповерхностями переключения. Число интервалов определяется критерием качества системы.
Известно управляющее устройство с кусочно-постоянным управлением в К интервалов, содержащее блок памяти, функциональные преобразователи, блоки сравнения и логичесский блок.
Предлагаемое устройство отличается от известного тем, что Б нем на входе установлены блок знака управления на первом интервале, связанный с логическим блоком, и блок выделения модулей, выход которого подключен к одному из входов к-1 блоков сравнения и через блок питания - ко входу /(-1 функциональных преобразователей, соединенных с соответствующим блоком сравнения. Выходы всех блоков сравнения подключены к логическому блоку. Эти отличия позволяют упростить устройство и повысить его точность.
Предлагаемое управляющее устройство решает задачу управления в К интервалов для систем п-го порядка при начальных условиях процесса, прииадлежащих заданному одномерному многообразию фазового пространства
при условии, что в ироцессе регулирования координата меняет знак не более одного раза, например в системах оптимального быстродействия при единичных скачках регулируемой
координаты или скорости. Устройство не требует измерения производных регулируемой координаты, а наличия сложных нелинейных преобразователей, так как все.необходимые нелинейные функциональные зависимости заранее подсчитываются и реализуются в управляющем устройстве на базе нелинейных потенциометров, диодных схем и т. д. при использовании модуля регулируемой координаты.
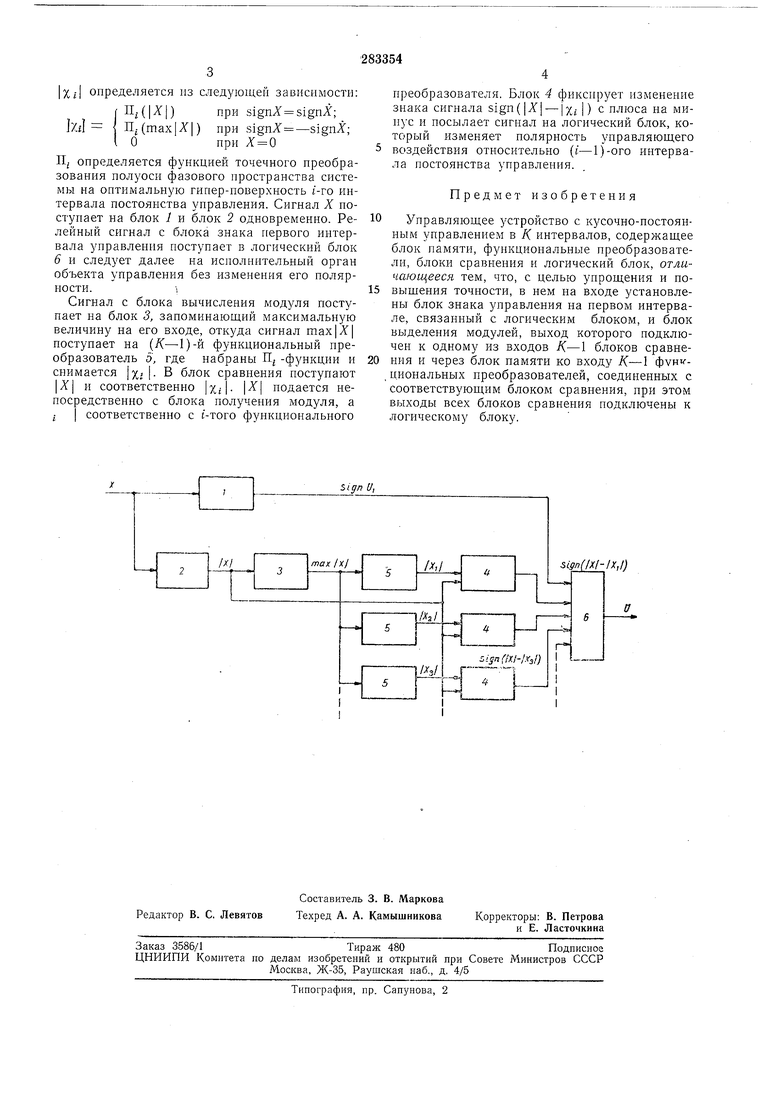
На чертеже изображена блок-схема предлагаемого устройства.
Устройство состоит из блока 1 знака управляющего воздействня на первом интервале, блока 2 выделения модулей, блока 3 памяти
максимальной величины, К-1 блоков сравнения 4, К-1 функциональных преобразователей 5 и логического блока 6.
Алгоритм предлагаемого управляющего устройства записывается в виде
25
U signU,Hsign( хИ),
IXil определяется из следующей зависимости:
I П()при signy r sign/ ;
IXil - I n() ири signvY -signJ; I 0при X 0
П; определяется функцией точечного преобразовапия иолуоси фазового иростраиства системы на оптимальную гипер-поверхность г-го нитервала постоянства управления. Сигнал X поступает на блок 1 и блок 2 одновременно. Релейный сигнал с блока знака первого интервала управления поступает в логический блок 6 и следует далее на псполиительный орган объекта управления без изменения его полярности.1
Сигнал с блока вычислеиия модуля поступает на блок 3, запоминающий максимальную величину на его входе, откуда сигнал тах| J| поступает на (К-1)-й функциональный иреобразователь о, где набраны П -функции и снимается |хг1- блок сравнения поступают Х и соответственно |Хг|. подается непосредственно с блока получения модуля, а j I соответственно с г-того функционального
преобразователя. Блок 4 фиксирует изменение знака сигнала sign(|Jf|- %i ) с плюса на минус и посылает сигнал на логический блок, который изменяет полярность управляющего воздействия относительно (i-1)-ого интервала постоянства управления.
Предмет изобретения
Управляющее устройство с кусочно-постоянным управлением в К интервалов, содержащее блок памяти, функциональные преобразователи, блоки сравнения и логический блок, отличающееся тем, что, с целью уирощення и повышения точности, в нем на входе установлены блок знака управления на первом интервале, связанный с логическим блоком, и блок выделения модулей, выход которого подключен к одному из входов /С-1 блоков сравнения и через блок памяти ко входу К-1 фунициональных преобразователей, соединенных с
соответствующим блоком сравнения, при этом
выходы всех блоков сравнения подключены к
логическому блоку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла фазового сдвига гармонических сигналов | 1990 |
|
SU1765781A1 |
| Релейный регулятор | 1978 |
|
SU765782A1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU798704A1 |
| Релейное устройство для кусочно-линейного управления | 1973 |
|
SU497559A1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| Система оптимального управления объектом второго порядка | 1977 |
|
SU651308A1 |
| Функциональный преобразователь | 1980 |
|
SU883923A1 |
| Устройство для защиты бурильной колонны от обрывов и скручиваний | 1985 |
|
SU1263823A1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
Sif/fi и, 3isn(/xl-/x,l)
