Известны .роторы для сборки деталей ЦИлиндр иче;акой фор-мы, имеющие :ра1вно. расположенные по окружности ipoTOpa рабочие силовые головки, соэдающие сборочное усилие IB налравленш, лер пендикулярном плоСК01СТИ сращения ротора. неред лспользо1ва.нием этих роторов неабходи мо обеспечить высокую точность от1носительнон ориентаци и собираемых деталей .на сборочной позиции.
Предложенный ротор отличает1ся те;м, что он выполнен сдвоенным, ic установленным на его верхней части (вибратором, обеопечивающим колебание одной .из деталей в радиальном натфавлении, а его нижняя часть вы1нолн-е а новоротной через универсальный шарадир для перекрытия погреш ности ор.иентации деталей ,в танге циальнО|М нанравленим. Это по3воля;гт Т1р0)водить сборку деталей со з начительной пОПрешностью .ИХ относительной ориеитацц-и перед соединением.
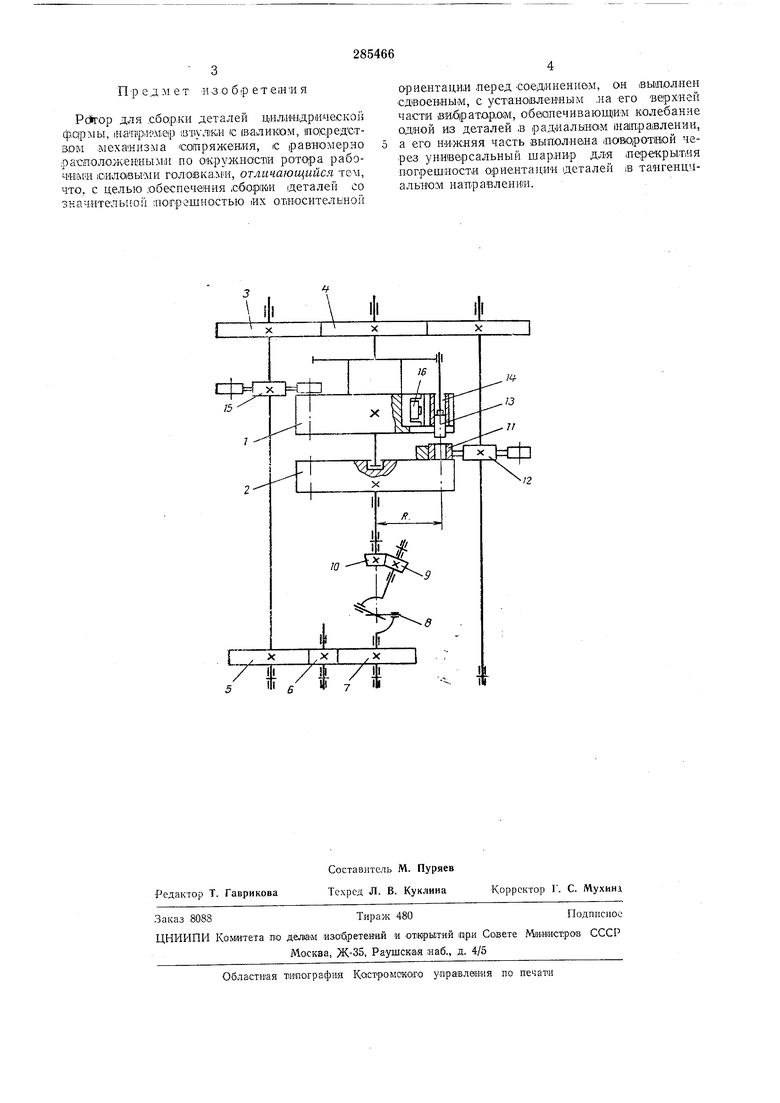
Па чертеже схематически изображен предложенный ротор.
Ротор для сборочного автомата состоит из двух расположенных одна над другой частей- верхней / и .нижней 2, приводимых во вращение зубчатым механизмом. Верхняя часть нолучает вращение через .зубчатые .колеса . i 4. В цель нривода нажней -частш 2 ротора, состоящей из зубчатых колес 5, 6 и 7 включен универсальный щарЛИр 8. Для совмещення частей ротора в параллелыных .ялоокостях между универсальным .щарниро м и валом нижней части ротора смонтир.о-вана коннческая зубчатая передача с колесами 9 и 10. На .нижней ротора в сборочном ириспособлении располагается одна из собирае мых деталей - втулка //, шсцающагася траисп.ортиылг pOTOpOiM 72. Вторая деталь - 1вал.И1К 13 подается в сборочную головку 14 транспортным роторо.м 15.
При рав номерном вращении ротора установленный на нем валик перемещается по окружности радиуса R с постоянной скор.астью, одновременно совершая колебан.ия в радиальном нанравлении от вибратора 16. а втулка
за счет неравномерного вращавия .нижней части 2 ротора перемещается |по дуге того же радиуса с переменной скоростью, обгоняя валик или отставая от него. Детали // и 13 перемещаются одна относительно другой в направлеНИИ двух .координатных ос.ей, чем обеспечивается автоматический поиск -и при достаточном совпадени.и осей соединение их и.од действ.ивм сборочного усилия, 1Нр;иложе1И1Иого в iiaпра вленим, периендику.тярном плоскости .враП р е .д м е т -и з о б ip е т е ш и я
Pdrop для .сборки деталей цидиндрическо ф1Црмы, iHa nipiK-vieip lenvMiK.- (с (валиком, inoicpeaCT3DM .механизма солтряжеиия, с равномерно ;расположен ньпы по окружности ротора рабочими )ВЫМИ головка.ми, отличающийся тем, что, с целью .обеспечеиия ,c6iOpi iH (деталей со зкачительпой погрешностью их от,1юситель:но;1
Ориентац.ии перед соединением, он выполнен сдвоенным, с уст-ановлеиным .на его верхней части виб|рато,р,о;м, обе1апечивающим колебание одной из деталей .в рад.иалынам 1на|пра1влении, а его нижняя часть выполнена 1пой0(рот1ной через уннверсальный шарнир для лерекрыт/ия погрешности ориентации деталей в тангенциальном направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСНАЯ Г ПЛТ?г|Тно-.и.;:^''г 11^1^ БИБ.П^Ю7ЕК,^--| | 1971 |
|
SU315562A1 |
| ТОЧЭЛЕКТРОПРИ$ОР»bH}>&.'i:iU'VL»:.i, | 1966 |
|
SU181013A1 |
| Автомат для сборки дюбелей с шайбами | 1991 |
|
SU1794004A3 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| УСТРОЙСТВО для СБОРКИ ДЕТАЛЕЙ ТИПА В АЛ-ВТУЛКА | 1970 |
|
SU260385A1 |
| СБОРОЧНАЯ РУКА | 1969 |
|
SU252843A1 |
| В ПТ Б | 1973 |
|
SU395220A1 |
| Устройство для автоматической сборки с автопоиском | 1980 |
|
SU942927A1 |
| Устройство для сборки | 1989 |
|
SU1771918A1 |
| УСТРОЙСТВО для СБОРКИ ДЕТАЛЕЙ | 1966 |
|
SU178754A1 |
Г X LX Г хХ
7 ж /4 /ж / ж / I у- iti
