1
Автооператор предназначен для загрузки и разгрузки цилиндрических деталей на автоматы.
Известны автооператоры с двумя рычагами с призмами, представляющими собой два параллельных звена параллелограмма, одно из двух других звеньев которой своей серединой шарнирно связано со штоком основного пневмоцилиндра, а концом - со штоком дополнительного цилиндра, на концах другого звена установлены ролики, перемеш,ающиеся по копиру.
Цель изобретения - обеспечить принудительный захват заготовок.
Предлагаемый автооператор отличается от известного тем, что он снабжен дополнительными, образуюш,ими захваты рычагами, подпружиненными к рычагам с призмами, установленными в концевых шарнирах связанного с пиевмоцилиндрами звена параллелограмма, и которые свободными концами взаимодействуют с дополнительными копирами.
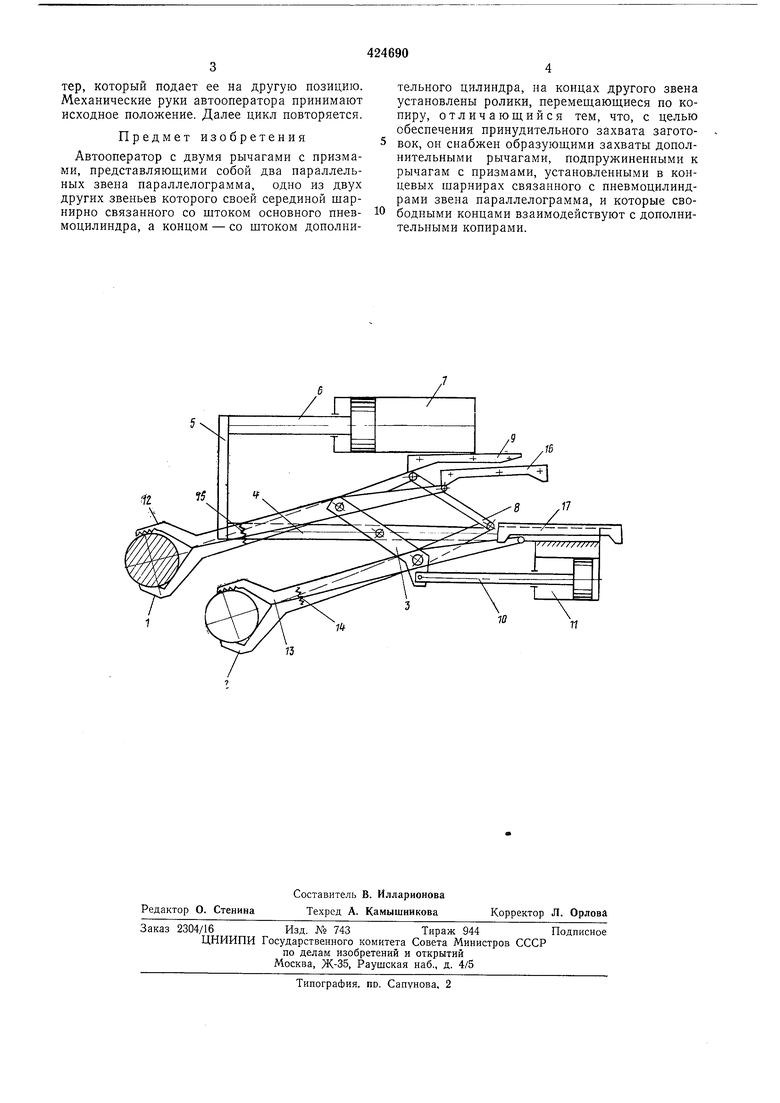
На чертеже представлена кинематическая схема предлагаемого автооператора.
Автооператор содержит два рычага I и 2 с призмами, представляюш,ие собой параллельные стороны шарнирного параллелограмма, звено 3 которого своей серединой шарнирно связано через штангу 4 и планку 5 со штоком 6 основного пневмоцилиндра 7, звено 8 параллелограмма, своим роликом взаимодействующее с копиром 9. Звено 3 концом шарнирно соединено со штоком 10 дополнительного пневмоцилиндра П. Дополнительные рычаги 12 и 13 установлены в концевых шарнирах звена 3, подпружинены к рычагам I и 2 нружннами 14 и 15, а свободными концами взаимодействуют с дополнительными копирами 16 и 17. Однотипные параллелограммы закреплены с двух сторон цилиндра 7.
Автооператор работает следующим образом.
В исходном положении призмы рычага 2
находятся под лотком транспортера, а призмы
рычага 1 вверху, справа от транспортера. При
перемещении штока 6 влево рычаги 2 захватывают заготовку с транспортера, при этом рычаг 13 разжат с помощью крутого участка копира 17. В процессе перемещения штока 6 шток 10 цилиндра 11 передвигается вправо,
и к центрам станка подходят верхние рычаги 1. После отвода центров станка деталь устанавливается на призме рычагов 1.
Шток цилиндра 11 перемещается влево, рычаги 1 с зажатой обработанной деталью отводятся с линии центров и одновременно рычаги 2 подают заготовку на линии центров станка. После закрепления заготовки в центрах станка шток 6 перемещается вправо н при перемещении штока цилиндра 11 вправо обработанная деталь устанавливается на транспортер, который подает ее на другую позицию. Механические руки автооператора принимают исходное положение. Далее цикл повторяется.
Предмет изобретения
Автооператор с двумя рычагами с призмами, представляющими собой два параллельных звена параллелограмма, одно из двух других звеньев которого своей серединой шарнирно связанного со штоком основного пневмоцилиндра, а концом - со штоком дополнительного цилиндра, на концах другого звена установлены ролики, перемещающиеся по копиру, отличающийся тем, что, с целью обеспечения принудительного захвата заготовок, он снабжен образующими захваты дополнительными рычагами, подпружиненными к рычагам с призмами, установленными в концевых шарнирах связанного с пневмоцилиндрами звена параллелограмма, и которые свободными концами взаимодействуют с дополнительными копирами.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1973 |
|
SU404607A1 |
| АВТООПЕРАТОР | 1971 |
|
SU305035A1 |
| Автооператор | 1979 |
|
SU831513A1 |
| Шаговый конвейер | 1977 |
|
SU747777A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ ТИПА ВАЛОВ ИЛИ СТАКАНОВ | 1969 |
|
SU237539A1 |
| Автооператор | 1973 |
|
SU446358A1 |
| Автооператор | 1984 |
|
SU1217654A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Линия изготовления комбинированных балок | 1988 |
|
SU1558676A1 |
