Известны автооператоры, снабженные захватами и механизмами поворота, в виде шток-рейки с зубчатым колесом.
Описываемый автооператор отличается от известных тем, что, с целью расширения технологических возможностей, держатель захватов подвижно установлен в двух взаимно лерпенди.кулярных -направляющих и связан посредством «омпенсатора с роликом, взаимодействующим со сменным .копиром и связанным подпружиненной тягой с кулисой.
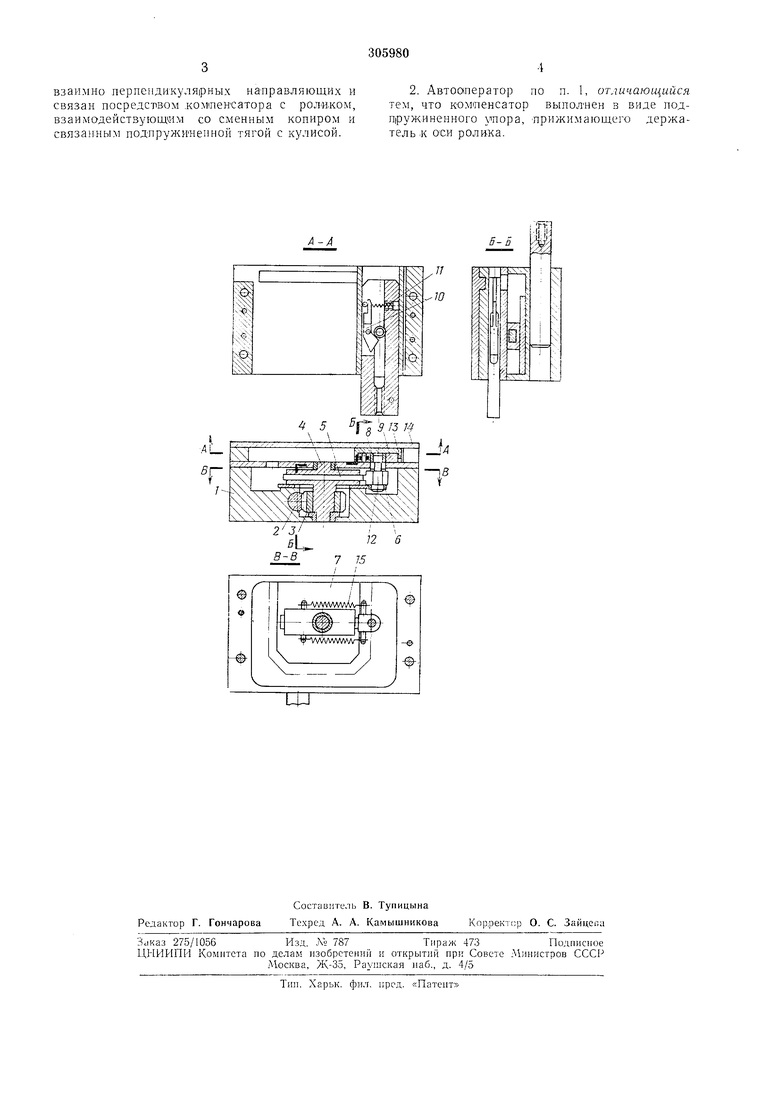
На че1ртеже изображен автооператор, общий вид и разрезы :по Л-А, Б-Б и В-В.
Автооператор содержит корпус /, шток-рейку 2, взаимодействующую с зубчатым -колесом 3, закрепленным на кулисе 4, в пазу которой установлена тяга 5 с роликом 6, взаимодействующим с копиром 7, и роликом 8, установленным в пазу держателя 9 для механизма захвата деталей, снабженного собачкой 10 и пружиной 11. Ролики 8 и 6 установлены на оси 12, а держатель 9 в ползуне 13, установленном на направляющей 14 в .корпусе /. Тяга 5 снабжена двумя пружинами 15.
AsTOOinepaTOp работает следующим образом.
Движение кулисе 4 передается непосредственно через щток1рейку 2 и зубчатое колесо . При повороте кулисы 4 на 250° ролик 6, закрепленный на тяге 5, свободно перемещающейся в пазу кулисы, описывает П-образную траектарию, катясь по копиру 7. Прилегание ролика 6 к копиру 7 обеспечивается двумя пруж1инами J5. П-образная траектория движения |рол1ика 6 передается через ось 12 и ролик 8 держателю 9, который совершает продольное движение в ползуне 13, а последний по направляющей 14 совершает движение, поперечное движению держателя 9. Если установленный на дерл ателе 9 механизм захвата упирается в стопку деталей, то собачка 10 под действием ролика 8 поворачивается, и роли.к 8 продолжает дв-ижение в пазу остающегося неподвижным держателя 9. После изменения направления вращения кулисы 4 ролик 8, двигаясь в пазу держателя 9 в обратном направлении, отводит собачку 10 и передает движение держателю 9 с механизмом захвата, перемещая их в обратную сторону, что достигается упором держателя 9 в ползун 13.
Пред.мет изобретения
1. Автооператор, снабженный держателем захвата, связанным с механизмом обеспечения требуемой траектории его движения и подпружиненной тягой, подвижно установленной в приводной кулисе, отличающийся тем, что, с целью расширения технологических возможностей, держатель подвижно установлен в двух
взаимно перпендикулярных направляющих и связан посредством .комтенсатора с рол«-ком, взаимодействующим со сменным копиром и связанным подпружиненной тягой с кулисой.
2. Автоаператор по п. 1, отличающийся тем, что компенсатор выполнен в виде подпружиненного упора, Прижимающего держатель .к оси ролика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1981 |
|
SU1014684A1 |
| Устройство к кольцевым ватерам для автоматической замены шпуль | 1946 |
|
SU69800A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Устройство для вырубки изделий из листового и ленточного материалов | 1978 |
|
SU753670A1 |
| Машина для укладки штучных изделий в коробки | 1972 |
|
SU445597A1 |
| Автооператор | 1974 |
|
SU492375A1 |
| ПДТГНТЯО- ..,, jВ. п. Бобров | 1970 |
|
SU275673A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для автоматической сборки нецоколеванных миниатюрных ламп накаливания | 1958 |
|
SU121512A1 |
| Захватное устройство | 1988 |
|
SU1625803A1 |
5
-&
