Изобретение относится к аппаратуре, обеспечивающей программное управление приводом поворотной платформы драглайна, и касается, в частности, устройства для определения положения ковша драглайна, подвешенного бифилярно на подъемном и тяговом канатах.
Известные устройства аналогичного назначения, содержащие датчик длины подъемного каната, не позволяют определять угловое отклонение ковша, приведенного к оси вращения, относительно вертикальной плоскости, проходящей через стрелу.
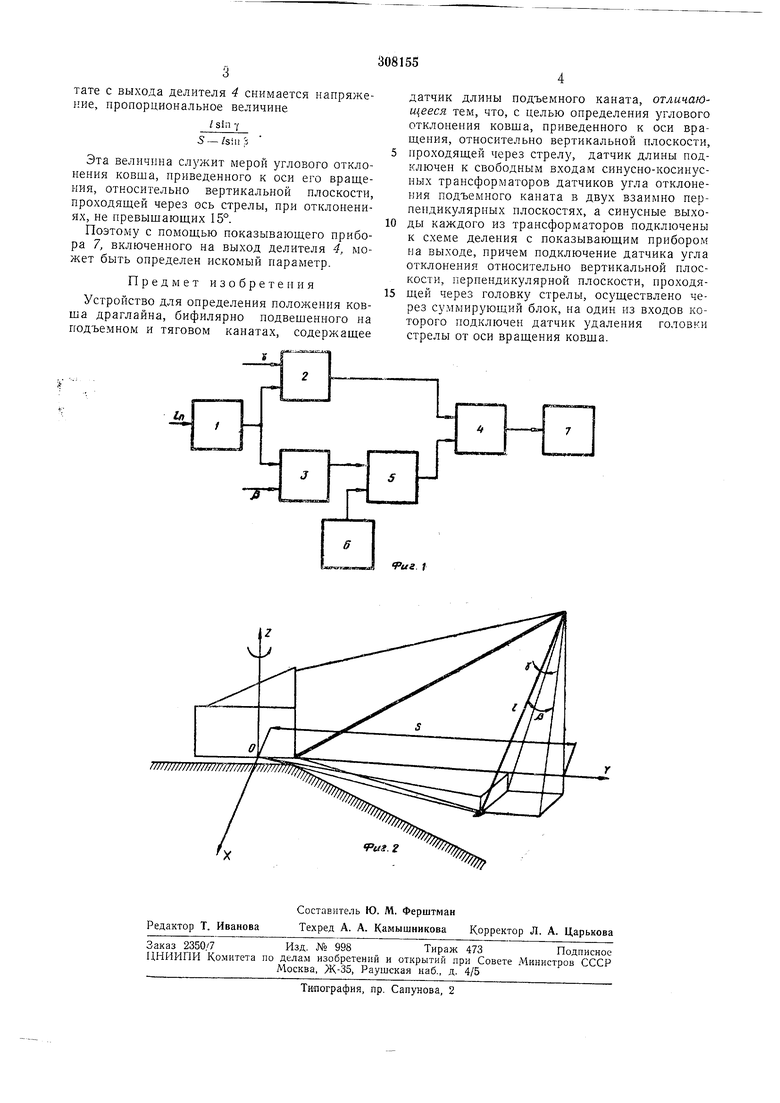
Предлагаемое устройство не имеет этого недостатка и отличается от известных тем, что датчик длины подключен к свободным входам синусно-косинусных трансформаторов датчиков угла отклонения подъемного каната в двух взаимно перпендикулярных плоскостях; синусные выходы каждого из трансформаторов подключены к схеме деления с показывающим нрибором на выходе. Подключение датчика угла отклонения относительно плоскости, проходящей вертикально через головку стрелы, осуществлено через суммирующий блок, к одному из входов которого подключен датчик удаления головки стрелы от оси вращения ковша.
обходимые для расчета определяемого значения углового отклонения ковша.
Значение / длины подъемного каната, вырабатываемое датчиком 1 длины подъемного
каната, подается на входы синусно-косинусных трансформаторов 2 и 3. Последние соединены с механическими датчиками углов отклонения подъемного каната в двух взаимно перпендикулярных плоскостях, например, поворотными рамками (на чертеже не показаны). На трансформатор 2 подается значение угла 7, образованного подъемным канатом с его проекцией на вертикальную плоскость, проходящую через ось стрелы, а на трансформатор 3 - значение угла р между подъемным канатом и его проекцией на плоскость, перпендикулярную плоскости стрелы и проходящую через головку стрелы экскаватора. Таким образом, на выходе синусно-косинусных
трансформаторов получаем напряжения, пропорциональные величинам.
Выходное напряжение с трансформатора 2 подается непосредственно на делитель 4, а с трансформатора 3 - через сумматор 5. На
этот же сумматор поступает выходной сигнал, пропорциональный величине S удаления головки стрелы от оси вращения О экскаватора. Сигнал вырабатывается с помощью поворотного трансформатора 6, ротор которого
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 1972 |
|
SU420741A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВОГО | 1973 |
|
SU375351A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Экскаватор-драглайн | 1978 |
|
SU746049A2 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
