Изобретение относится к гидросистемам тракторов, предназначенным для осуществления регулирования положения на:веоных орудий, не имеющих олорных жолес, относительно тра.ктора.
Известен гидрораспределитель регулятора позиционно-силоеого типа хода рабочих органов сельскохозяйственного орудия, содержащий на входном валике, кинематически связанном с регулирующим золотником гидрораспределителя регулятора, переключатель режимов регулирования, который соединяет входной валик либо с позиционным либо с силовым датчиками регулятора позиционно-силового типа.
Целью изобретения является создание относительно простого .переключателя режимов регулирования, обеспечивающего автоматическую разгрузку насоса в конце подъема в транспортное положение навесной системы трактора при установке фиксатора переключателя в режим силового регулирования.
Для достижения поставленной цели подпружиненный корпус переключателя режимов (видов) регулирования и рычаг, связанный с позиционным датчи1ком, снабжены упорами, которые взаимодействуют друг с другом в конце подъема «авесной системы в транспортное положение. При этом улор на рычаге, связанном с позиционным датчиком, выполнен
подпружиненным и подвижным и в момент взаимодействия упомянутых упоров, опирающимся на скощенную пла«ку-кронщтейн, установленную со стороны рычага, связанного с позиционным датчиком, например, на крыщке корпуса гидрораспределителя регулятора.
После отрыва орудия от поверхности почвы прекращается слежение .по усилию, поскольку исчезает собственно регулируемое усилие. В этот момент подвижной упор -на рычаге, связанном с позиционным датчиком, уже опирается на скощенную планку-кронштейн п движется, преодолевая сопротивление пружины упора и далее, контактируя с упором на корпусе переключателя, обеспечивает переход На позиционное слежение и, как следствие, разгрул ает насос в конце подъема навесного устройства в транспортное полол ение.
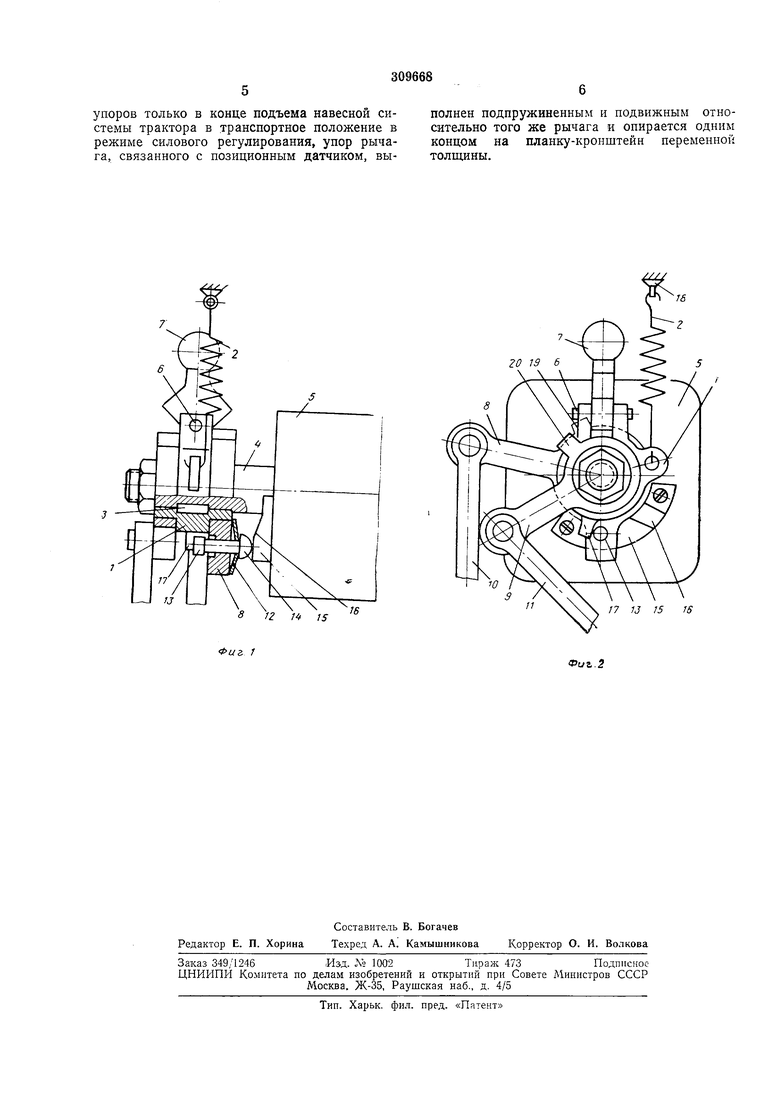
На фиг. I и 2 показан предлагаемый разгрузочный переключатель режимов регулирования для регулятора позиционно-силового т ила (в двух проекциях).
Разгрузочный переключатель состоит из корпуса 1, подпружиненного прул синой 2 и
5 связанного через шпонку 3 с входным валиком 4 гидрораслределителя регулятора 5. Входной валик постоянно кинематически связан с регулирующим золотником гидрораспределителя регулятора. На установленной в корри фиксированных положения: нейтральное два крайних, в которых фиксатор связан с ычагом 8 или с рьгчагом 9. При нейТ|ральном положении фиксатора .рычаги 8 и 9 могут вободно вращаться относительно корпуса; в крайних положениях фиксатора может вращаться только один из рычагов.
Рычаг 8 через тягу 10 (фиг. 2) связан с позиционным датчиком, рычаг 9 че|рез тягу // - с силовым датчиком (датчики условно е иоказалы). В рычаге 8 (фиг. 1) установлен подвижный :подпружиненнь й пружиной 12 упор 3 с головкой 14. Упор в одну сторону перемещается пружиной, а в другую - нланкой-кронштейном 15, имеющей наклонный участок 16 (неременную толщину). Для исключения влияния позиционного слежения на силовое в процессе работы, а также для обеснечения контакта упора 13 с упором 17 на корпусе планка-кронщтейн установлена в зоне подхода упора 13 к положению, соответствующему транспортному положению навесной системы. Пружина 2 закреплена одним концо.м в точке 18 на корпусе трактора, а другим соединена с корпусом переключателя и при жимает фиксатор, к, одному из выступов /9 или 20 рычагов 5 и 9 в зависимости от выбранного режима регулирования.
Описанное устройство работает следующим образом.
При переводе фиксатора в левое (по. фиг. 1) крайнее положение валик через щпонку, корпус, фиксатор, рычаг и тягу соединяется с силовым датчиком. После перевода рукояткой унравления (условно не показано) регулирующего золотника гидрораспределителя регулятора в положение «опускание навесная система с орудием из транспортного положения опускается вниз. Позиционный датчик перемещает через тягу рычаг против часовой стрелки (фиг. 2). Упоры 13 и 17 расходятся, поскольку рычаг 9 до момента заглубления орудия в почву остается неподвижным; при этом выступ рычага не позволяет прзжине развернуть корпус вслед за рычагом 8. Наличие скощенного участка дает возможность упору перемещаться под действием пружины вправо, исключая тем самым в дальнейщем влияние упора на корпус после заглубленпя орудия в почву, т. е. исключается влияние позиционного слежения на силовое в процессе, например, пахоты. Тяговое усилие или соответствующая ему деформация силовой пружины устанавливаются на уровне заданных водителем величин, при отклонении этих величин от заданных рычаг 9 вращается против илн по часовой стрелке в зависимости от знака отклонения заданного тягового усилия (деформации ). Соответствующие отклонения рычага 9 через упор, к которому фиксатор ностояпно прижат через корпус прунсиной, передаются на валик, который, в свою очередь, отклоняет регулирующий золотник гидрораспределителя регулятора от нейтрали в сторону опускания или
подъема ,в зависимости от знака отклонения рычага 9, осуществляя таким образом силовое регулирование.
В конце гона водитель рукояткой управления (на фигурах не показана) с.мещает регулирующий золотник от нейтрали на подъем, и навесная система трактора с орудием поднимаются. После отрыва орудия, от поверхности почвы и исчезновения тягового
усилия рычаг 9, корпус, валик и регулирующий золотник гидрораспределнтеля регулятора остаются неподвижными в положении, показанном на фиг.- 2. В тот же момент навесная система с орудием поднимаются, и
рычаг. 8 с упором движется. При этом упор сначала скользит по скощенной поверхности кронщтейна. После прохождения головкп упора по скощепной поверхности упор, сжав пружину, оказывается в крайнем левом положенин и в момент окончания подъема орудия в транспортное положение контактирует с упором корпуса, растягивая пружину, поворачивает корпус и валнк по часовой стрелке, обеспечивая перевод регулирующего золотника гидрораспределителя регулятора в нейтральное положение (разгрузка насоса гидросистемы трактора).
Перевод фиксатора в крайнее правое (фиг. 1) положение соответствует переходу на. режим позиционного регулирования (слежения). В этом случае валик в нроцессе регулирования постоянно связан через корпус, фиксатор, рычаг и тягу с нозициоппым датчиком. Процесс удержания навесной системы в заданном положении осуществляется аналогично регулированию заданного тягового ЗТилия, описанному выше.
Предмет изобретения
1.Разгрузочный переключатель режимов регулирования для регулятора позиционнооилового типа, содержащий подпружиненный
корпус, кинематически связанный, например через валик, с регулирующим золотником гидрораспределителя регулятора, фиксатор, качающийся на оси, установленной в корпусе переключателя регулятора, два рычага, связанных соответственно с силовым и позиционным датчиками и свободно вращающихся относительно корпуса при нейтральном положении фиксатора переключателя, отличающийся тем, что, с целью обеспечения автоматической разгрузки насоса в конце подъема в транспортное положение навесной системы трактора при установке фиксатора нереключателя в режим силового регулирования, его подпружиненный корпус и рычаг, связанный с позиционным датчиком, снабжены упорами, контактирующими друг с другом в конце подъема навесной системы в транспортное положение.
упоров только в конце подъема навесной системы трактора в транспортное положение в режиме силового регулирования, упор рычага, связанного с позиционным датчиком, выполнен подпружиненным и подвижным относительно того же рычага и опирается одним концом на планку-кронштейн переменной толщины.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОРАСПРЕДЕЛИТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО- | 1972 |
|
SU352615A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГО ТИПА | 1972 |
|
SU353664A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕЖИМОВ РЕГУЛИРОВАНИЯ ДЛЯ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГОТИПА | 1971 |
|
SU420264A1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ БУКСОВАНИЯ ТРАКТОРА С УНИВЕРСАЛЬНОЙ ГИДРОНАВЕСНОЙ СИСТЕМОЙ | 1972 |
|
SU424523A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВЕСНОЙ СИСТЕМОЙ ТРАКТОРА | 1997 |
|
RU2126616C1 |
| МЕХАНИЗМ ДЛЯ НАСТРОЙКИ, ПЕРЕКЛЮЧЕНИЯВИДОВ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ РАБОЧИХОРГАНОВ ОРУДИЙ И УВЕЛИЧЕНИЯСЦЕПНОГО ВЕСА ТРАКТОРА!.2 | 1972 |
|
SU426615A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| ГИДРОСИСТЕМА С СИЛОВЫМ, ПОЗИЦИОННЫМ и КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ ГЛУБИНЫОБРАБОТКИ | 1971 |
|
SU288820A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ ДЛЯ РУЧНОГО | 1971 |
|
SU301453A1 |
| ГИДРОСИСТЕМА С СИЛОВЫМ И ПОЗИЦИОННЫМ РЕГУЛИРОВАНИЕМ ГЛУБИНЫ ОБРАБОТКИ | 1971 |
|
SU312557A1 |
Фиг. } 17 13 15
Фиг. 2 IS
