Изобретение относится к системам автоматического управления, в частности к системам автоматизированного управления горнотранспортными работами на карьерах.
Известны си€темы автоматического управления подачей автотранспорта к экскаваторам, которые содержат устройства управления, фиксирующие устройства (датчики положения автотранспорта), устройства приема и передачей информации и устройства сигнализации, маршрута следования.
При таком управлении каждый самосвал, следующий на погрузку, проезжает в карьер, и возле каждогО ответвления от главной магистрали, где расположен распределительный пункт, водитель следит за сигнализатором марщрута следования. Кроме сигнализатора на распределительном пункте располагается устройство управления, фиксирующее устройство, устройства приема информации и передачи на предыдущий распределительный пункт.
Однако реализация таких систем управления представляет значительные трудности, так как необходима установка несколькихраспределительных пунктов, фиксирующих и передающих устройств на всем протяжении карьерных путей, профиль и протяженность которых непрерывно изменяются:, что вызывает постоянное перемещение аппаратуры системы,
Кроме того, тяжелые условия (резкие колебания температуры, запыленность, влажность), в которых должна работать аппаратура, установленная непосредственно в карьере (фиксирующие и передающие устройства) значительно усложняют конструктивные и схемные рещения известных систем автоматического управления а выполнение системы в виде специализированного устройства исключает ее универсальность и гиб-; кость и приводит к значительной перенастройке системы при изменении характери-i стик объекта, начальных условий (изменение количества oбCvTyживaeмыx экскаваторов, изменение заданных интервалов посылки автосамосвалов к экскаватору) и в случае изменения алгоритма управления к конструктивным изменениям. Перечисленные недостатки значительно
снижают эффективность известных систем автоматического управления.;
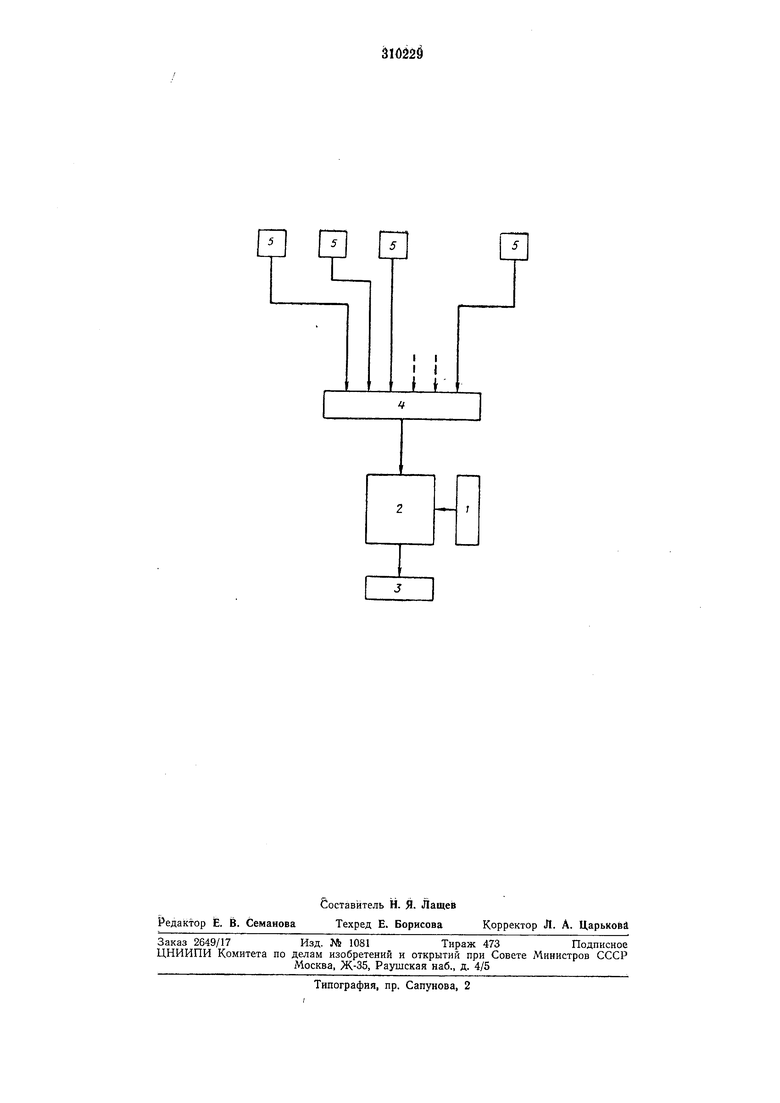
В предлагаемой системе автоматического управления движением автотранспорта к эк-, скаваторам повышение эффективности управления достигается применением общего для всего обслуживаемого горнотранспортного комплекса блока управления, на вход которого включено одно фиксирующее устройство, которое фиксирует прохождение авторайленйя анализирует oeecneMeiTHOCTb автоТранспортом каждого экскаватора и выдает маршрут следования водителю автосамосвала на сигнализатор, который В|Ключ;ается на выход блока. Анализ осуществляется, на основании информации о погрузке, поступающей от блоков передачи информации, расположенных на каждом экскав.аторе, через общий блок приема и-нформации распределительного пункта, -включенный на вход блока управления. Блок управления, фиксирующее устройство, блок приема информации и сигнализатор расположены на едином распределИтельном пункте. На чертеже изображена функциональная схема списываемой системы автоматического управления движением автотранспорта к экскаваторам. Система содержит фиксирующее устройство /, блок управления 2, сигнализатор 3 маршрута следования, блок- прием.а информации 4, установленные на распределительном пункте, а также блоки передачи информации 5, расположенные на экскаваторах (пунктах погрузки). Количество блоков передачи равно ч-ислу обслуживаемых эксиаваторов. Фиксирующее устройство / предназначено для фиксации проезжающих на погруз|Ку автосамосвалов и подачи запроса маршрута в блок управления. Блок управления 2 анализирует обеспеченность экскаваторов автотрайспортом и вырабатывает маршрут следования, который выдается, на сигнализатор 5. Информация о погруаке, необходимая для анализа, поступает в блок управления от блоков передачи через блок приема информации 4. При получении запро са маршрута следования обеспеченность автотранспЪртом каждого эк-, скаватора анализируется следующим образом:для каждого экскаватора проверяется выполнение услав;ия-5- , где: п tg - время от распределительного пункта до экскаватора, п - время погрузки;. л-количество автосамоюв алов, направ-. ленных к экскаватору, но еще не пол груженных; , «проверяется выполнение условия. t - , где: /-текущее значение времени, 0-момент времени отправки предыдущего артосамосвала к данному эйскавато/н -заданный интервал отправки автосамосвалов к экскаватору, определяемый требуемой производительностью, каждого экскаватора, и может регулироваться в процессе работы в зависимости от выполнения сменного з|адания экскаватором. Самосвал направляется к экскаватору, у которого выполняются оба условия.. В случае выполнения обоих условий по нескольким экскаваторам выбирается экскаватор, у которого разность () - максимальная. Сигнал о погрузке поступает в блок приема информации 4 от соответствующего блока передачи при выполнении погрузки- машинистом экскаватора. Блок управления 2 за-поминает момен-г отправки последнего самосвала к каждому экскаватору и - Он, где По - количество самосвалов, отправленных к экскаватору. Пн - количество нагруженных автОсамосвалов. Требуемая производительность определяется по сменной выработке, котор.ая задается перед началом смены. Таким образом, анализируя накапливаемую и заданную информацию, блок упра(вле.ния выдает на сигнализатор 3 маршрут следования- автотранспорта. Предмет изобретения Система автоматического управления движением автотранспорта к экскаваторам, со-, держащая фиксирующее устройство прохождения .автосамосвала под погрузку, логический блок управления, сигнализатор маршрута следования автотрансп-орта, а также блок приема информации с .датчиков, pacrioложенных в пунктах пргру;зки, отлтйющаяся тем, что, с целькз.. повышёния эффективности, управления, в ней фиксирующее . устройство прохождения автосамосвала под пр-грузку и бйок приема и.нформации с да-тчиков, расположенных в пунктах погрузки, еар.аллельно подключены к входу логического блока управления вых1од которого связан с сигналиаатором марщрута следования авто гранопорта..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресования и контроля движения автосамосвалов | 1972 |
|
SU440315A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Устройство для управления подвижными и рассредоточенными объектами на карьере | 1973 |
|
SU485457A1 |
| Устройство для управления транспортными средствами | 1978 |
|
SU734727A1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОГРУЗОЧНО-ТРАНСПОРТНЫМИ СРЕДСТВАМИ НА КАРЬЕРАХ ПРИ СЕЛЕКТИВНОЙ ВЫЕМКЕ РУД И СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КАЧЕСТВОМ РУДОПОТОКА НА ОСНОВЕ ЭКСКАВАТОРНО-АВТОМОБИЛЬНОГО КОМПЛЕКСА | 1996 |
|
RU2100844C1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для контроля и учета работы карьерного автотранспорта | 1975 |
|
SU516075A1 |
| Устройство для передачи и приема информации о погрузочных и транспортных единицах | 1976 |
|
SU615520A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1974 |
|
SU470457A1 |