Изобретение относится к области подъемногранспортной техники.
Известен способ управления механизмом передвижения крана, например козлового с электродвигателем и механическим тормозом на каждом ходовом катке, посредством контроллера и наложения, механического тормоза перед остановкой. Однако такой способ не обеспечивает точности остановки крана при подходе к заданному технологическим процессом месту. Кроме того, при торможении механическим тормозом возникают повышенные динамические усилия, и в результате частого срабатывания тормоза снижается надежность его работы.
Известен также способ управления механизмом передвижения крана, содержаш;им два асинхронных двигателя, соединенных обш;им валом. При этом способе один из двигателей в тормозном режиме подключают к источнику постоянного тока, что дает возможность получить малые скорости передвижения крана. Однако этот способ может быть использован только для кранов с механизмом передвижения, состояш:им из двух или четырех электродвигателей, соединенных между собой обш,им валом. На козловых кранах соединение двигателей общими валами конструктивно сложно, а на мостовых кранах обш,ий вал механизма
передвижения вызывает дополнительные усилия перекоса.
Цель изобретения - повышение точности остановки крана, уменьшение динамических
усилий при замедлении его движения и повышение надежности работы механического тормоза. Это достигается тем, что после отключения всех двигателей от сети при подходе к заданному технологическим процессом месту
точной остановки их подключают к источнику постоянного тока, а при достижении заданной скорости часть двигателей отключают от источника постоянного тока и подключают к сети переменного тока для получения ползучей скорости. Посла получения сигнала на
остановку двигатели снова подключают к
источнику постоянного тока и в конце тормол ения накладывают механический тормоз.
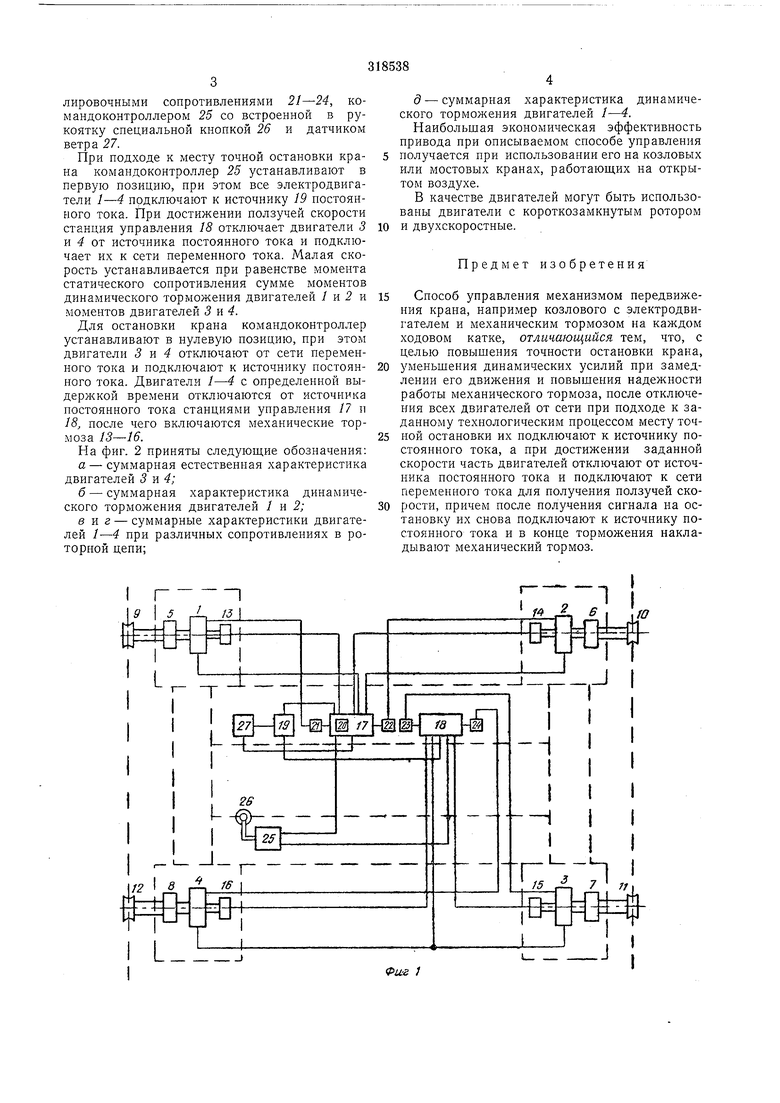
На фиг. 1 дана схема управления электроприводами, реализующая предлагаемый способ; на фиг. 2 - механические характеристики электропривода.
Электропривод содержит электродвигатели 1-4, соединенные через редукторы 5-8 с
приводными катками 9-12 и имеющие электромеханические тормоза 13-16. Управление электродвигателями осуществляется станциями управления 17 и 18, электрически соединенными с регулируемым источником 19 полировочными сопротивлениями 21-24, командоконтроллером 25 со встроенной в рукоятку снециальной кнопкой 26 и датчиком ветра 27.
При подходе к месту точной остановки крана командоконтроллер 25 устанавливают в первую позицию, при этом все электродвигатели 1-4 подключают к источнику 19 постоянного тока. При достижении ползучей скорости станция управления 18 отключает двигатели 5 т 4 от источника постоянного тока и подключает их к сети переменного тока. Малая скорость устанавливается при равенстве момента статического сопротивления сумме моментов динамического торможения двигателей У и 2 и моментов двигателей 3 и 4.
Для остановки крана командоконтроллер устанавливают в нулевую позицию, при этом двигатели отключают от сети переменного тока и подключают к источнику постоянного тока. Двигатели /-4 с определенной выдержкой времени отключаются от источника постоянного тока станциями управления 17 и 18, после чего включаются механические тормоза 13-16.
На фиг. 2 приняты следующие обозначения:
а - суммарная естественная характеристика двигателей 3 и 4;
б - суммарная характеристика динамического торможения двигателей / и 2;
8 и г - суммарные характеристики двигателей /-4 при различных сопротивлениях в роторной цепи;
д - суммарная характеристика динамического торможения двигателей /-4.
Наибольшая экономическая эффективность привода при описываемом способе управлення получается при использовании его на козловых или мостовых кранах, работающих на открытом воздухе.
В качестве двигателей могут быть использованы двигатели с короткозамкнутым ротором и двухскоростные.
Предмет изобретения
Способ управления механизмом передвижения крана, например козлового с электродвигателем и механическим тормозом на каждом ходовом катке, отличающийся тем, что, с целью повышения точности остановки крана, уменьшения динамических усилий при замедлении его движения и повышения надежности работы механического тормоза, после отключения всех двигателей от сети при подходе к заданному технологическим процессом месту точной остановки их подключают к источнику постоянного тока, а при достижении заданной скорости часть двигателей отключают от источника постоянного тока и подключают к сети переменного тока для получения ползучей скорости, причем после получения сигнала на остановку их снова подключают к источнику постоянного тока и в конце торможения накладывают механический тормоз.
/7
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1969 |
|
SU256024A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU361190A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Устройство для управления лебедкой | 1981 |
|
SU981196A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1970 |
|
SU280635A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1984 |
|
SU1234538A1 |

