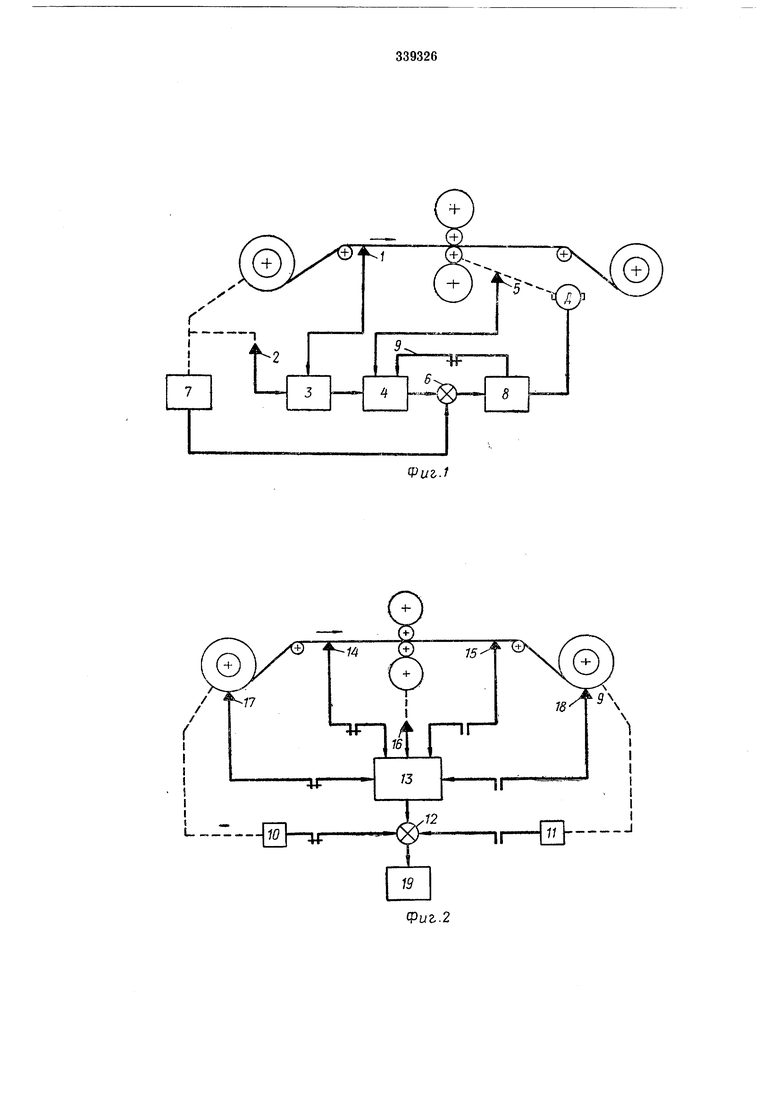
Известен способ автоматического замедления реверсивного стана холодной прокатки в конце пропуска по текущему значению остатка полосы на разматываюш,ей моталке, заключающийся в том, что тормозной путь определяют по скорости клети и угловой скорости разматывающей моталки. Недостатки этого способа заключаются в том, что вычисляемый тормозной путь не является минимальным из-за малой точности учета обжатия и толщины полосы. Цель изобретения - более точный учет и тем самым обеспечение минимального пути торможения независимо от толщины полосы. Достигается это тем, что дополнительно измеряют скорость полосы до клети. Минимальный тормозной путь клети при постоянном темпе замедления (отрицательном ускорении) равен где УК - скорость клети; а - отрицательное ускорение клети. Тормозной путь на входной стороне клети S,z5«(l-e) .l/K(l-e). (2) Тормозной путь, исчисляемый в витка.х по сы, соответственно равен ,,, S, е /)ср. - диаметр среднего витка полосы, , ДТ + ОР ср - , е DT -текущий диаметр рулона; DO-диаметр барабана моталки. Из выражения (2) и (3) получается Dep.(5) .ао -/Эо + т Из выражения (5) 2iia Z)cp 1 ср Ru + 1 С8) DCP 244/ о е соср - среднее значение угловой скорости разматывающей моталки при постоянной скорости; со - текущее значение угловой скорости . УК(К, + У,) 8-мКп ,-b V(yR, + V,) Получить минимальный тормозной путь возможно при реализации как выражения 6, так и выражения 10. При наличии точных датчиков диаметра, непосредственно измеряющих диаметр, более предпочтительна реализация выражения 6, а при отсутствии таких датчиков - выражения 10. Далее рассматривается реализация способа по вырал ению: 10. Дополнительно в выражение 10 вводят влияние запаздывания привода клети на отработку сигнала, которое определяется временем срабатывания релейно-контактной аппаратуры и инерционностью привода. Поэтому выбор времени включения стана в режим тормол ения осуществляется по выражению 8ita/ oi (К, + 2а4)( +1,)(11) Здесь 3 - вышеупомянутое время запаздывания. Таким образом, скорость клети УК искусственно завышается на величину . После выдачи команды на торможение это приращение снимается. Предлагаемый способ по выражению 10 иллюстрируется структурной схемой на фиг. 1. Для простоты схема изображена только для правого направления прокатки. Скорость полосы на входе клети Vi, измеренная датчиком 1, суммируется с угловой скоростью разматывающей моталки, измеренной датчиком 2, в сумматоре 3. Сумма сигналов поступает в множитель 4, где на скорость клети УК, измеренной датчиком 5 с учетом запаздывания. Полученное произведение (Ук+2а;з) (( подается на Элемент сравнения 6, где сравнивается с непрерывно уменьшающимся сигналом, пропорциональным остатку полосы , вырабатываемым узлом 7. Пока остаток полосы 8jiaRo больше произведения (Ук+2а з) (, воздействие на схему управления станом 8 отсутствует. При равенстве остатка полосы и произведения скоростей стан включается в режим торможения, коррекция запаздывания 9 снимается, а возможное отклонение процесса торможения от заданного корректируется величиной, равной (cORo+Уl). Предлагаемый способ по выражению 6 иллюстрируется структурной схемой на фиг. 2. Блоки 10 и 11 измерения остатка полосы подключены к моталкам, а их выходы соединены через контакты направления прокатки с одним из входов,элемента 12 сравнения. На другой вход этого элемента подключен нелинейный преобразователь 13, входы умножения которого через контакты направления прокатки присоединены к датчикам 14 и 15 скорости полосы на входе клети и к датчику 16 скорости, а вход деления к датчикам 17 и 18 диаметра. Выход элемента сравнения подключен к системе управления скоростью прокатного двигателя 19. При правом направлении прокатки, например, блок 10 измерения остатка полосы непрерывно считывает витки, остающиеся на левой моталке, а блок // запоминает количество витков, наматываемых на правую моталку. Сигнал с блока 10, пропорциональный текущему значению остатка полосы, непрерывно подается на элемент сравнения. С другой стороны на элемент сравнения подается сигнал с нелинейного преобразователя, например, множительно-делительного устройства. Нелинейный преобразователь непрерывно вычисляет величину, пропорциональную пути торможения в витках с учетом обжатия и толщины полосы. При равенстве сигналов нелинейного преобразователя и блока измерения остатка полосы в систему управления прокатным двигателем выдается сигнал на- торможение, причем стап тормозится по закону, обеспечивающему равенство ,, DO + D так как возможные отклонения улавливаются элементом сравнения и подаются в системе управления прокатным двигателем. Предмет изобретения Способ автоматического торможения реверсивного стана холодной прокатки в конце пропуска при постоянном темпе замедления, включающий измерение остатка полосы на разматывающей моталке, пропорционально числу витков на ней, а также измерение скорости клети и угловой скорости разматывающей моталки, отличающийся тем, что, с целью более точного учета обжатия и тем самым обеспечения минимального пути торможения независимо от толщины полосы, дополнительно измеряют скорость полосы до клети.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1990 |
|
SU1787478A1 |
| Способ торможения реверсивного стана холодной прокатки | 1989 |
|
SU1710157A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1980 |
|
SU937070A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВХОДА МЕТАЛЛА | 1973 |
|
SU404526A1 |
| Устройство для автоматической точной остановки реверсивного прокатного стана с моталками | 1977 |
|
SU692648A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |
| Устройство для автоматического замедления и точного останова реверсивного стана холодной прокатки | 1976 |
|
SU713629A1 |
| Способ прокатки полосы на дрессировочном стане | 1988 |
|
SU1565552A1 |
| Устройство для коррекции уставки натяжения на моталке стана холодной прокатки | 1982 |
|
SU1050771A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТИ ВХОДА МЕТАЛЛА В КЛЕТЬ ПРИ ПРОКАТКЕ | 1973 |
|
SU405614A1 |
fPui.f
