Изобретение отноеится к области нрнборостроепия.
Известны гиростабилизироваиные платформы, например, для гравиметрических приборов, содержащие размещенные в кожу.хах гиромоторы, следящие системы силовой стабилизации и массивиые тела, связанные с кожухами.
Предложенное устройство отличается тем, что на кожухе каждого гнромотора па заранее заданном расстоянии от оси прецессии дополнительно устаиовлепо массивное тело заранее задаииой величины и формы.
Такое конструктивное вынолненне устройства нозволяет получить заранее задашше значение, напри.мер 90°, сдвига фазы между возмущающими горизонтальными уско)ениями и наклонами гироплатформы, а также повысить стабильность этого сдвига фазы.
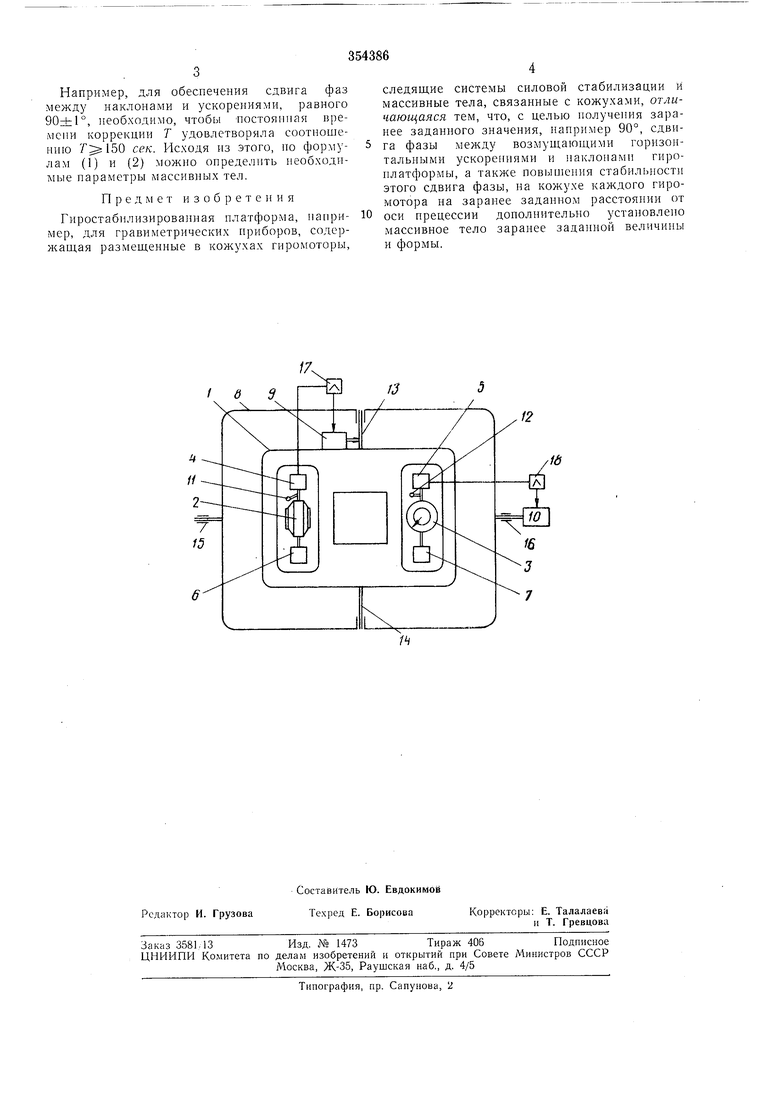
На чертеже показана схема предложенной гиростабилизировапно платформы.
Платформа содержит укрепленные на раме / гиромоторы 2 и 3, датчики 4 и 5 угла, датчики 6 и 7 момента, ра.му 8 и стабилизирующие двигатели 9 и JO.
Па кожухах гиромоторов 2, 3 установлены массивные тела Л к J2 соответственно.
Стабилизирующий двигатель 9 связан с осями 13 н 14 и через усилитель 17 с датчиком 4 угла, а стабилизирующий двигатель 10 соединен с осями 15 и 16 и через усилитель 18 с датчиком 5 угла.
Величина а, вес Р и отстояние / массив)1ых тел //, 12 от осей прецессии соответствуюн ;их гиромоторов 2, 3 определяют по формулам
Р (1)
/ - ,(2)
РТ
где а - длина ребра (для тел //, 12, имеющих форму куба);
d - удельный вес тел //, 12;
Я -кинетический момент гиромоторов 2, 3;
Т - постоянная времени коррекции положения гиростабилизнрованной н.чатформы.
Поскольку величина Т и фазовый сдвиг между горизонтальными возмущающими ускорениями и наклонамн гнроплатформы - взаимозависимые величины, то, задаваясь необходимой величиной сдвига фаз, по известным соотнощениям находят величину Т, а затем по формулам (1) и (2) вычисляют такие параметры массивных тел, которые позволяют достигнуть поставленной цели.
Например, для обеспечения сдвига фаз между наклонами и ускорениями, равного 90+1°, необходимо, чтобы постоянная времени коррекции Т удовлетворяла соотношенню сек. Исходя из этого, ио формулам (1) и (2) можно определить необходимые параметры массивных тел.
Предмет и з о б р е т е н и я
Гиростабилизированная платформа, например, для гравиметрических приборов, содержащая размещенные в кожухах гиромоторы.
следящие системы силовой стабилизации и массивные тела, связанные с кожухами, отличающаяся тем, что, с целью получения заранее заданного значения, например 90°, сдвига фазы между возмущающими горизонтальными ускорениями п наклонами гироплатформы, а также повьинения стабильности этого сдвига фазы, па кожухе каждого гиромотора на заранее заданном расстоянии от
оси прецессии дополнительно установлено массивное тело заранее заданной величины и формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
f2
