1
Изобретение относится к области грузозахватных устройств.
Известны устройства для автоматического управления крановым захватом, работающим по четырехтактному циклу, включающие стойку, жестко соединенную с рамой захвата, и подвешенный к крановому крюку ползун, связанный с захватными органами и взаимодействующий своим унором с подвижным фиксирующим элементом.
Предлагаемое устройство отличается от известных тем, что фиксирующий элемент выполнен в виде прямоугольной рамки, навешиваемой на упор ползуна, центр которого смещен относительно вертикали, проходящей через центр тяжести рамки, а стойка имеет упоры для воздействия на рамку одним из них снизу, а двумя другими сверху, причем расстояние между верхними упорами больше ширины и меньше длины рамки. Это упрощает конструкцию и повышает надежность работы устройства.
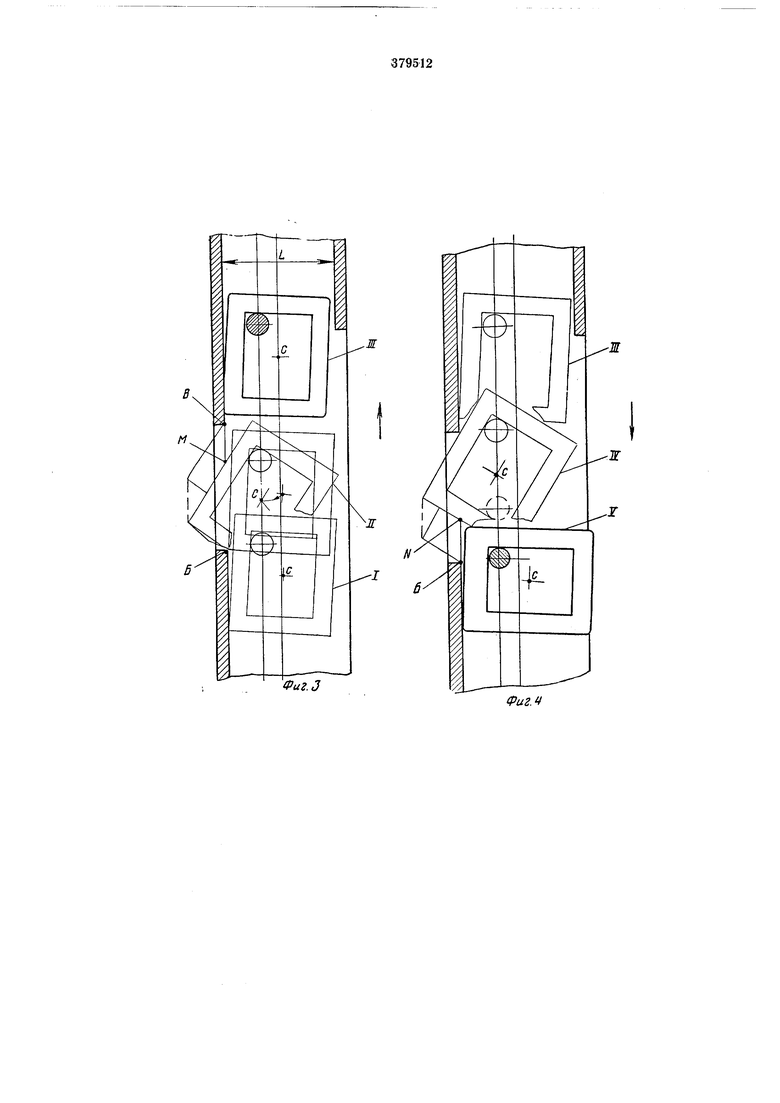
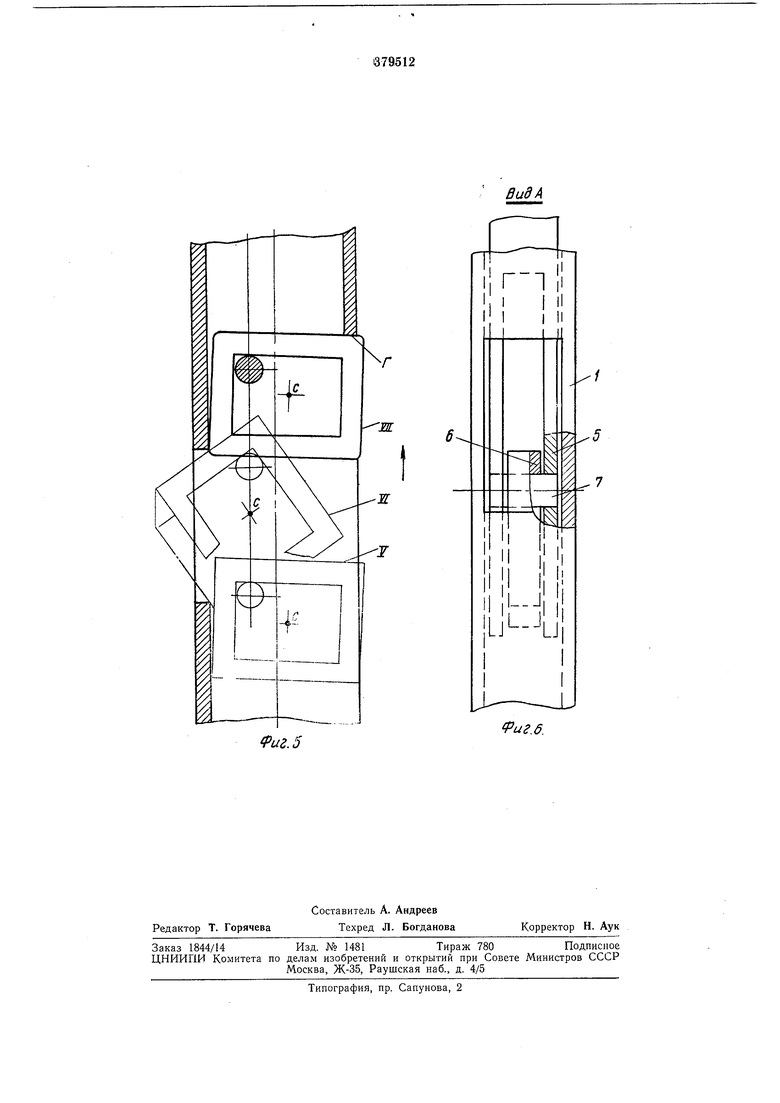
На фиг. 1 изображен грузозахват с описываемым устройством, общий вид; на фиг. 2- устройство с последовательными положениями фиксирующего элемента при ходе ползуна вниз и наведенном захвате, лежащем на грузе, первый такт; на фиг. 3 - то же, при ходе ползуна вверх и обжатии груза, второй такт; на фиг. 4 - то же, при ходе ползуна вниз носле постановки груза на площадку, третий такт; на фиг. 5 - то же, при ходе ползуна вверх и снятии с груза захвата, четвертый такт; на фиг. 6 - вид А на фиг. 2.
Устройство содерл ит жестко соединенную с рамкой захвата стойку /, внутри которой перемещается подвешенный к крановому крюку ползун 2, соединенный цепями 3 с захватными органами 4. Между щеками 5 ползуна помещается прямоугольная рамка 6, свободно навешенная на палец 7 (упор). Стойка / имеет вырезы, кромки Б, В и Г которых служат упорами, взаимодействующими с рамкой.
Устройство работает следующим образом.
В крайнем нижнем положении ползуна рамка 6 находится в положении I. Вследствие-того, что центр С тяжести рамки смещен вправо относительно оси пальца 7, рамка стремится повернуться вокруг него по часовой стрелке.
При подъеме кранового крюка ползун перемещается вверх, увлекая за собой рамку, которая по прохождении нижней точкой кромки Б поворачивается (положение И). При дальнейшем движении ползуна рамка, упираясь точкой М в кромку В, возвращается в первоначальное относительно ползуна полол енке HI и движется вдоль паза шириной L, натягивая цепи 3 и поворачивая захватные органы 4 до тех нор, пока пакет не будет обжат и
поднят. После постановки груза крюк, а с ним и ползун с рамкой опускаются.
Рамка, перейдя нижней точкой за кромку В, начинает поворачиваться по часовой стрелке до совмещения своего центра тяжести с вертикальной осью пальца 7 (положение IV), а при дальнейшем опускании, упираясь точкой Л в кромку Б, поворачивается под действием момента силы своего веса, постепенно занимая положение V.
При последующем подъеме ползуна рамка проходит положение VI, взаимодействуя с кромкой В, занимает положение VII, упираясь в кромку Г. В таком положении ползун не имеет возможности дальнейщего перемещения вверх относительно стойки и захват поднимается без натяжения цепей 3 за стойку, что приводит к открытию захватных органов под действием противовеса и снятия грузозахвата с груза.
При последующем опускании ползуна рамка, проходя положение VIП, занимает исходное положение I (процесс аналогичен переходу рамки из положения III в V).
В дальнейщем цикл может быть повторен.
Таким образом, в течение первого такта рамка поворачивается на 180° по часовой стрелке, поворачиваясь при каждом ходе ползуна ввиз на 90°, т. е. поочередно меняя взаимное относительно кромок Б и Г положение
ipuz. /
больщей и меньщей сторон. Внутренний размер L стойки больще короткой, но меньще длинной стороны рамки, что и приводит к работе захвата по четырехтактовому циклу.
Предмет изобретения
Устройство для автоматического управления крановым захватом, работающим по четырехтактовому циклу, включающее стойку, жестко соединенную с рамой захвата, и подвешенный к крановому крюку ползун, связанный с захватными органами и взаимодействующий своим упором с подвижным фиксирующим
элементом, отличающееся тем, что, с целью упрощения конструкции и повышения надежности работы, фиксирующий элемент выполнен в виде прямоугольной рамки, навешиваемой на упор ползуна, центр которого смещен
относительно вертикали, проходящей через центр тяжести рамки, а стойка имеет упоры для воздействия на рамку одним из них снизу, а двумя другими сверху, причем расстояние между верхними упорами больше ширины
и меньше длины рамки.
иг.2
А
I I
Фиг.З
иг.5
иг.б.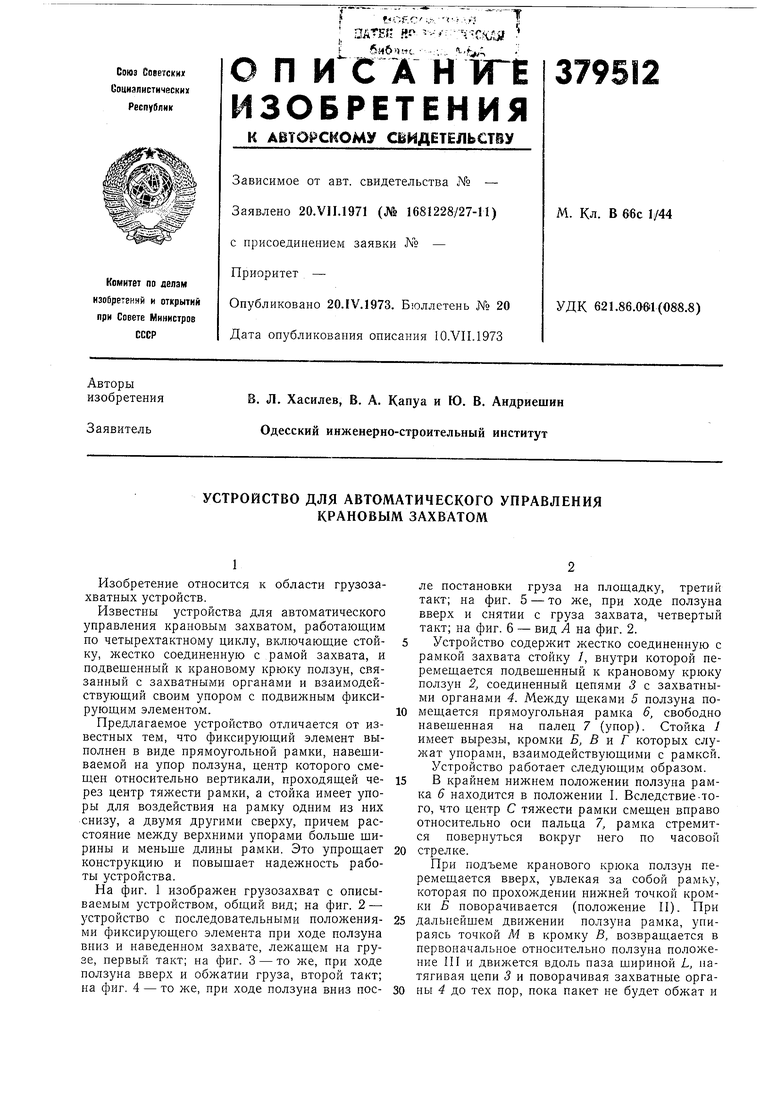
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захватное устройство для изделий с вертикальным отверстием | 1990 |
|
SU1782913A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Автоматический клещевой захват | 1984 |
|
SU1323515A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА МАЯТНИКОВОГО ТИПА | 1966 |
|
SU184285A1 |
| НАВЕСНАЯ ПЛОЩАДКА | 1992 |
|
RU2029839C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375249A1 |