I
Изобретение касается машиностроения и может быть использовано для оснащения автоматических и механизированных станочных линий, с целью перекладки изделий с одновременным их кантованием в вертикальной плоскости.
Известны автооператоры к металлорежущим станкам, выполненные в виде управляемых захватов, установленных на концах рычагов, жестко соединенных с щестерней, обкатывающейся по рейкам щтоков, установленных в корпусе автооператора силовых цилиндров привода.
Предлагаемый автооператор отличается тем, что ось щестерни установлена обоими концами в ползущках, подвил ных в направляющих корпуса, параллельных направлению движения штоков. Это обеспечивает движение захватов по сложной траектории.
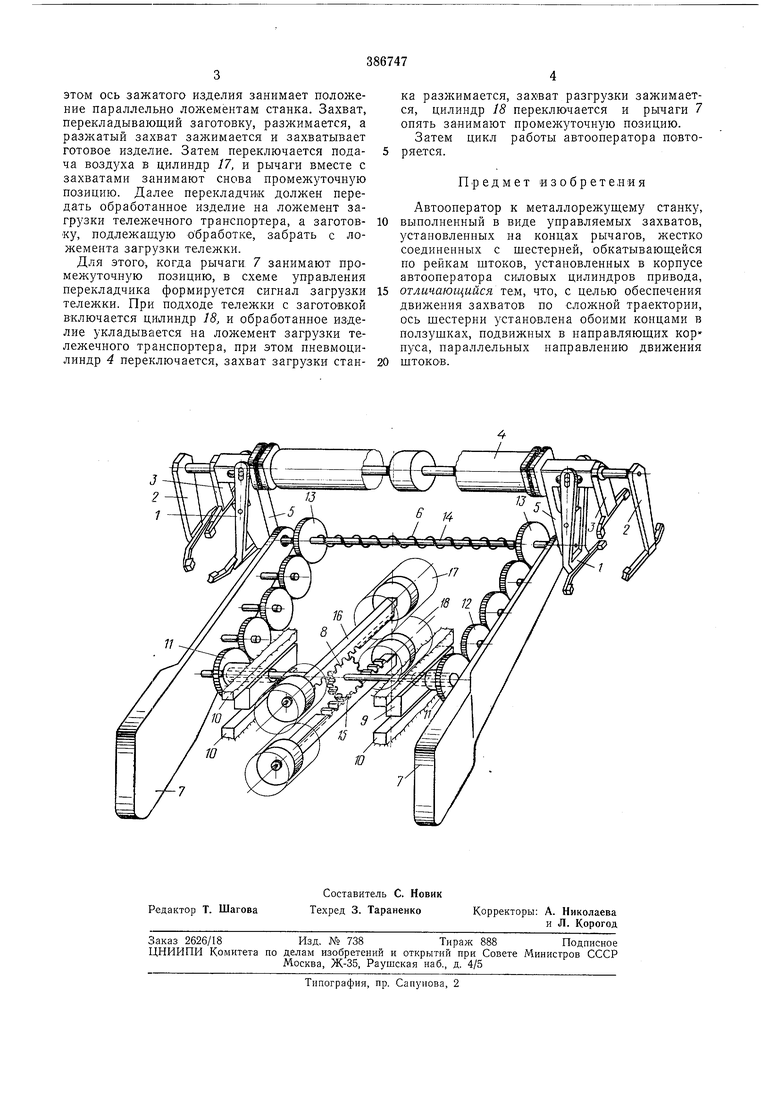
На чертеже изображена кинематическая схема автооператора.
Автооператор имеет два захвата, образованные рычагами / и 2 и упорами 3. Рычаги 2 закреплены на штоке пневмоцилиндра 4 и в процессе зажима-разжима изделия совершают поступательные движения вдоль оси штока. Рычаги 1 установлены шарнирно на кронштейнах 5, жестко соединенных с крышками пневмоцилиндра 4. Рычаги / получают качательное движение от оси, установленной
в штоке пневмоцилиндра 4. Упоры лсестко закреплены на кронштейнах. Оба захвата вместе с иневмоцилиндром 4 при помощи кронштейнов установлены на валу 6. Вал установлен ка подшипниках скольжения в рычагах 7. Рычаги 7 жестко закреплены на оси шестерни 8, которая установлена на подшипниках скольжения в ползушках 9. Ползушки расположены в прямолинейных н-аправляющих 10.
К ним Лчестко прикреплены зубчатые колеса 11, сцепляющиеся при помощи колес 12 с колесами 13. Одно колесо 13 установлено на валу на шпонке, а другое - свободно. Колеса 13 подпрул инены нружиной 14 кручения
для выбора зазора в зубчатых зацепленнях. Колеса 12 вместе с осями ЗстановЛеиы на рычагах 7. Шестерня входит в зацепление с рейками 15 и 16, а сами рейки соединяют между собой поршни силовых цилиндров 17 и 18.
Цилиндры 17 и 18, а иаправляюн;ие выполнены в едином корпусе.
В исходном полол ении автооператор занимает промел уточную позицию, причем в одном захвате заготовка, подготовленная к обработке, а другой захват разжат и свободен. При подаче воздуха в цилиндр 17 оба захвата перемещаются и оказываются над позицией разгрузки станка. Одновременно с поворотом рычагов 7 захваты поворачиваются за счет планетарной передачи. При
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Автооператор | 1984 |
|
SU1217654A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ ЗАГОТОВОК в РАБОЧУЮ ЗОНУ МНОГОПОЗИЦИОННОГО ПРЕССА | 1972 |
|
SU343876A1 |
| ВСЕСОЮЗНАЯ Iпл:п:^;о-т[лг;;г;[-ндя'j^j^xmiir"— "^ Г^ П Г .! ^"У •• — • .- лL.-: .L-fv It i^^ i ;^i Ij--^ | 1971 |
|
SU300294A1 |
| АВТООПЕРАТОР | 1972 |
|
SU331878A1 |
| Станок для фрезерования односторонних скосов на торцах зубьев шестерен | 1977 |
|
SU738791A1 |
| Станок для сгибания фигурных изделий | 1981 |
|
SU1028406A1 |
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
