1
Изобретение относится к автоматизации и механизации производственных процессов обработки деталей типа тел вращения и предназначено для разгрузки и загрузки металлорежущих станков.
Известны автооператоры, у которых оба рычага с захватами перемещаются от общего привода.
Цель изобретения - повыщение производительности.
Предлагаемый автооператор отличается тем, что его рычаги с захватами соединены в виде щарнирного параллелограмма, одно из двух звеньев которого своей серединой щарнирно связано со щтоком основного цилиндра, а своим концом - со штоком дополнительного цилиндра; на концах другого звена установлены ролики, движущиеся по копиру.
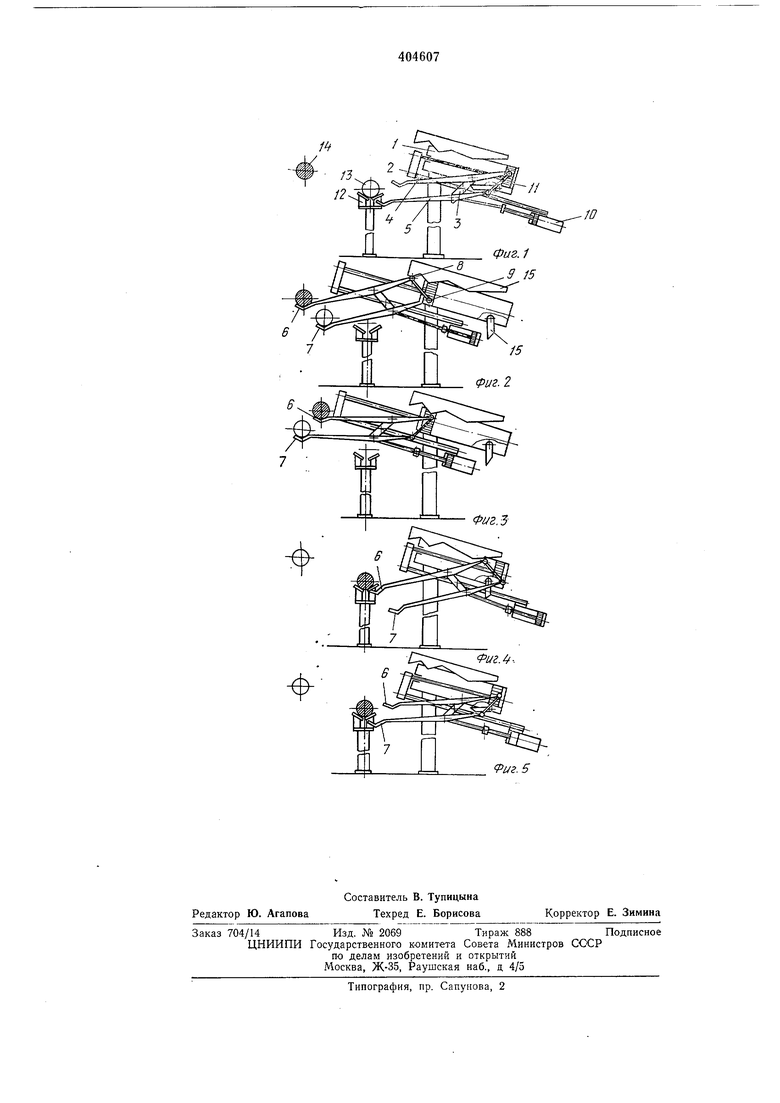
На фиг. 1 показано исходное положение автооператора перед съемом детали с транспортера; на фиг. 2 - положение автооператора при разгрузке станка; на фиг. 3 - положение автооператора при загрузке станка; на фиг. 4 - положение автооператора при укладке снятой со станка обработанной детали на транспортер; на фиг. 5 - исходное положение автооператора после окончания полного цикла его работы.
Автооператор состоит из основного гидроили пневмоцилиндра 1, шток которого жестко связан с двумя направляющими 2, симметрично расположенными по обе стороны гидро- или пневмоцилиндра 1. На направляющих 2 шарнирно закреплены два коромысла
3, на которых так же шарнирно закреплены
две пары рычагов 4 и 5 с захватами 6 и 7
для деталей на одном конце и роликами 8
и 9 на другом. На направляющих 2 жестко
закреплен вспомогательный гидро- или пневмоцилиндр 10, шток которого связан шарнирно с коромыслами 3. Рычаги 4 и 5 соединены планками 11, длина которых равна длине коромысел 3. Рычаги 4 и 5 расположены параллельно и вместе с коромыслами 3 и соединительными планками 11 составляют параллелограмм. Захватами 6 и 7 снимают с транспортера 12 заготовку 13 и перемещают ее к станку, а снятую со станка обработанную деталь 14 возвращают на транспортер 12.
Ролики 8 и 9 движутся по специальным копирам 15. При этом захваты 6 и 7 описывают заданную траекторию движения. Вспомогательный цилиндр 10 включается в работу автоматически при движении основного
цилиндра 1.
Автооператор работает следующим образом.
В исходном положении (фиг. 1) обрабатываемая деталь 14 находится в зоне загрузки
станка, заготовка 13 на транспортере 12,
основной цилиндр 1 находится в крайнем заднем положении, а вспомогательный цилиндр 10 - в крайнем переднем положении, загрузочные захваты 7 выдвинуты вперед, а разгрузочные захваты 6 оттянуты назад. По окончании обработки детали 14 на станке основной гидро- или пневмоцилиндр 1 движется внеред, и загрузочные захваты 7 снимают заготовку 13 с транспортера 12. Затем одновременно с движением основного цилиндра 1 вспомогательный цилиндр 10, двигаясь назад, поворачивает коромысла 3 таким образом, что разгрузочные захваты 6 оказываются впереди загрузочных захватов 7 и подводятся с помощью копиров 15 к обработанной на станке детали 14 (фиг. 2). Деталь 14 освобождается от зажимного устройства станка и после этого вспомогательный цилиндр 10, двигаясь назад, поворачивает коромысла 3, выводя деталь 14 из загрузочной зоны станка и подводя на ее место заготовку 13 (фиг. 3).
После закрепления заготовки 13 в станке основной цилиндр 1 движется назад, выводя деталь 14 из станка, а вспомогательный цилиндр 10, двигаясь назад одновременно с основным цилиндром 1, поворачивает коромысла 3 таким образом, что загрузочные захваты 7 отходят назад, а разгрузочные захваты 6 с деталью 14 - внеред. Двигаясь по заданной с помощью копира 15 траектории, разгрузочные захваты 6 укладывают обработанную деталь на транспортер 12 (фиг. 4).
После прихода основного цилиндра 1 в
крайнее заднее положение вспомогательный
цилиндр 10, двигаясь вперед и поворачивая
коромысла 3, возвращает захваты 6 и 7 в
исходное положение (фиг. 5).
Цикл работы автооператора на этом заканчивается. Отвод основного гидро- или пневмоцилиндра 1 от станка и операции, связанные со снятием с транспортера 12 готовой детали 14 и укладкой на ее место новой заготовки, совмещены с мащинным временем
станка.
Предмет изобретения
Автооператор с двумя рычагами с захватами, перемещающимися от общего привода, состоящего из основного и дополнительного гидро- или пневмоцилиндров и копира, отличающийся тем, что, с целью повыщения производительности, рычаги с захватами соединены в виде щарнирного параллелограмма, одно из двух звеньев которого своей серединой шарнирно связано со штоком основного цилиндра, а своим концом - со щтоком дополнительного цилиндра, на концах другого звена установлены ролики, движущиеся по копиру.
/
Риг. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1972 |
|
SU424690A1 |
| Автооператор | 1979 |
|
SU831513A1 |
| Загрузочно-разгрузочное устройство | 1978 |
|
SU795687A1 |
| ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ В ЦЕНТРАХ | 1967 |
|
SU195837A1 |
| АВТООПЕРАТОР | 1972 |
|
SU331878A1 |
| Автооператор | 1973 |
|
SU446358A1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU459324A1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU524675A2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ ТИПА ВАЛОВ ИЛИ СТАКАНОВ | 1969 |
|
SU237539A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1569175A1 |