1
Известны устройства для транспортирования в вертикальном направлении плоских изделий, например листов стекла, содержащие полочный элеватор и механизмы загрузки и выгрузки.
Однако эффективность известных устройств сравнительно мала.
Предлагаемое устройство отличается от известных тем, что механизмы загрузки и выгрузки выполнены в виде двух поворотных роликовых рам, кинематически связанных между собой гибкими связями. Это повышает эффективность работы устройства.
Загрузочная рама может быть снабжена удерживающим изделие механизмом в виде силового цилиндра, на щтоке которого шарнирно установлен упор, .кинематически связанный с- подпружиненной клиновой скалкой, взаимодействующей с неподвижным упором, закрепленным на раме элеватора.
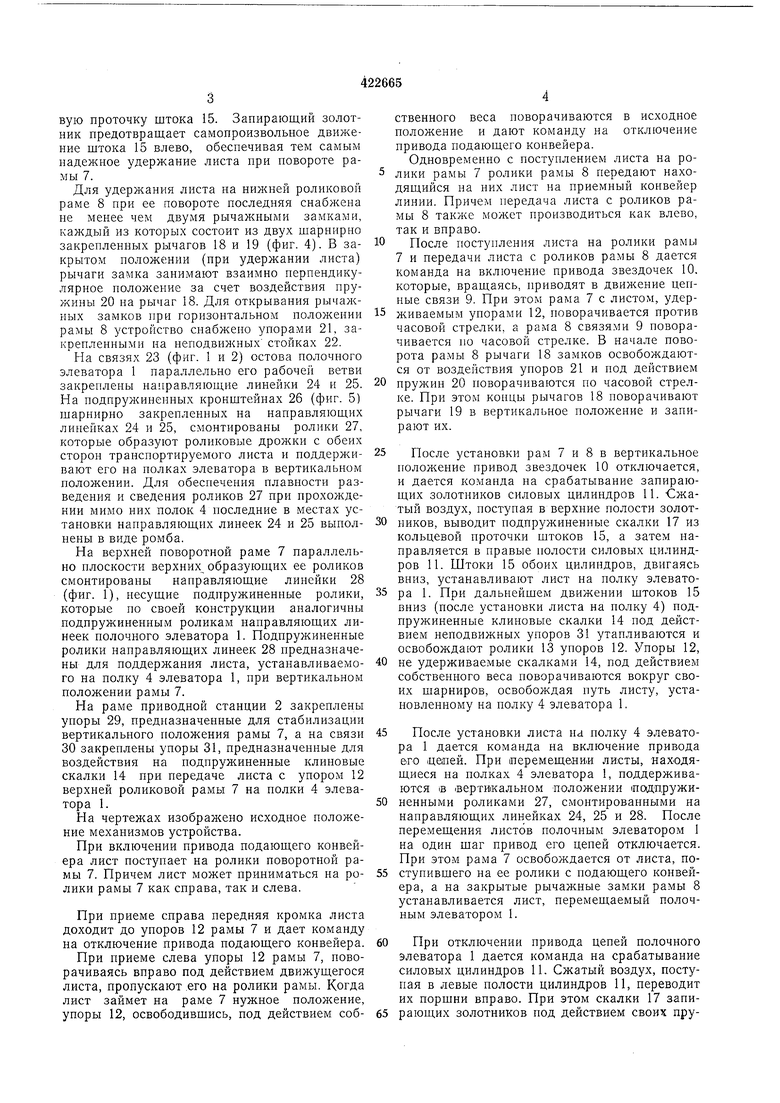
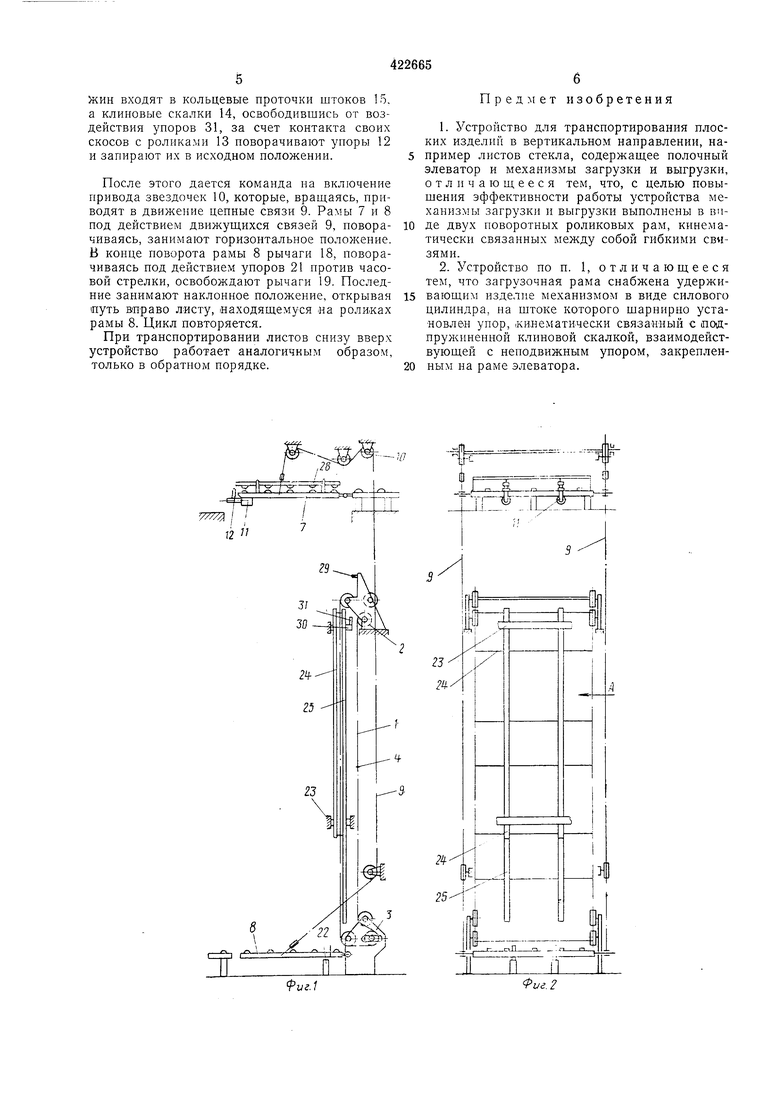
На фиг. 1 изображено предлагаемое устройство, вид сбоку; на фиг. 2 - то же, вид спереди; на фиг. 3 - удерживающее устройство верхней поворотной рамы; на фиг. 4 - рычажный замок нижней поворотной рамы; на фиг. 5 - вид по стрелке А на фиг. 2; на фиг. 6 - вид по стрелке Б на фиг. 5.
Устройство содержит полочный элеватор 1, установленный между подающим и приемным конвейерами и включает приводную 2 и натяжную 3 станции. На цепях элеватора 1 на равных расстояниях друг от друга закреплены полки 4, на концах которых смонтированы ролики 5 (фиг. 6), находящиеся в контакте с направляющими 6 остова элеватора 1.
Поворотные роликовые рамы 7 и 8 (фиг. 1 и 2) устройства, расположенные одна над другой, шарнирно закреплены на рамах подающего и приемного конвейеров и соединены между собой цепными связями 9. Последние нриводятся в движение звездочками 10, обеспечивая тем самым синхронизацию поворота роликовых рам 7 и 8. Приводы движения цепей полочного элеватора 1 и цепных связей 9 на чертежах не изображены.
На верхней роликовой раме 7 смонтированы удерживающие устройства в виде силовых цилиндров 11, на штоках которых шарнирно
закреплены упоры 12, предназначенные для удерживания листа при повороте рамы 7. На упоре 12 (фиг. 3) закреплен ролик 13, находящийся в контакте с подпружиненной клиновой скалкой 14, смонтированной в отверстии
щтока 15. Для предотвращения проворачивания и выпадания скалки 14 шток 15 снабжен прорезями, в которые входят концы пальца 16. В передней крышке цилиндра 11 смонти рован запирающий золотник, конец подпруживенной скалки 17 которого входит в кольцевую проточку штока 15. Запирающий золотник предотвращает самопроизвольпое движение щтока 15 влево, обеспечивая тем самым надежное удержание листа при повороте рамы 7.
Для удержания листа на пижпей роликовой раме 8 при ее повороте последняя снабжена не менее чем двумя рычалсными замками, каждый из которых состоит из двух щарнирно закрепленных рычагов 18 и 19 (фиг. 4). В закрытом положении (при удержании листа) рычаги замка занимают взаимно перпендикулярное положение за счет воздействия пружины 20 па рычаг 18. Для открывания рычажных замков при горизонтальном положении рамы 8 устройство спабжепо упорами 21, закрепленными на неподвижных стойках 22.
На связях 23 (фиг. 1 и 2) остова полочпого элеватора 1 параллельно его рабочей ветви закреплены направляющие линейки 24 и 25. На подпружиненных кронщтейнах 26 (фиг. 5) щарпирно закрепленпых на направляющих линейках 24 и 25, смонтированы ролики 27, которые образуют роликовые дрожки с обеих сторон транспортируемого листа и поддерживают его на полках элеватора в вертикальном положении. Для обеспечения плавпости разведения и сведения роликов 27 при прохождении мимо них полок 4 последние в местах установки направляющих линеек 24 и 25 выполнены в виде ромба.
На верхней поворотной раме 7 параллельно плоскости верхних образующих ее роликов смонтированы направляющие линейки 28 (фиг. 1), несущие подпружиненные ролики, которые по своей конструкции аналогичны подпружиненным роликам направляющих линеек полочного элеватора 1. Подпружиненные ролики направляющих линеек 28 предназначены для поддержания листа, устанавливаемого на полку 4 элеватора 1, при вертикальном положении рамы 7.
На раме приводной станции 2 закреплены упоры 29, предназначенные для стабилизации вертикального положения рамы 7, а на связи 30 закреплены упоры 31, предназначенные для воздействия на подпружиненные клиновые скалки 14 при передаче листа с упором 12 верхней роликовой рамы 7 на полки 4 элеватора 1.
На чертежах изображено исходное положение механизмов устройства.
При включении привода подающего конвейера лист поступает на ролики поворотной рамы 7. Причем лист может приниматься на ролики рамы 7 как справа, так и слева.
При приеме справа передняя кромка листа доходит до упоров 12 рамы 7 и дает команду на отключение привода подающего конвейера.
При приеме слева упоры 12 рамы 7, поворачиваясь вправо под действием движущегося листа, пропускают его на ролики рамы. Когда лист займет на раме 7 нужное положение, упоры 12, освободивщись, под действием собственного веса поворачиваются в исходное положение и дают команду на отключение привода подающего конвейера.
Одновременно с поступлением листа на ролики рамы 7 ролики рамы 8 передают находящийся на них лист па приемный конвейер линии. Причем передача листа с роликов рамы 8 также может производиться как влево, так и вправо.
После поступления листа на ролики рамы 7 и передачи листа с роликов рамы 8 дается команда на включение привода звездочек 10. которые, вращаясь, приводят в движение цеппые связи 9. При этом рама 7 с листом, удерживаемым упорами 12, поворачивается против часовой стрелки, а рама 8 связями 9 поворачивается по часовой стрелке. В начале поворота рамы 8 рычаги 18 замков освобождаются от воздействия упоров 21 и под действием
пружип 20 поворачиваются по часовой стрелке. При этом концы рычагов 18 поворачивают рычаги 19 в вертикальное положение и запирают их.
После установки рам 7 и 8 в вертикальное полол ение привод звездочек 10 отключается, и дается команда на срабатывание запирающих золотников силовых цилиндров 11. -Сжатый воздух, поступая в верхние полости золотНИКОВ, выводит подпружиненные скалки 17 из кольцевой нроточки штоков 15, а затем паправляется в правые полости силовых цилиндров 11. Штоки 15 обоих цилиндров, двигаясь вниз, устанавливают лист на полку элеватора 1. При дальнейщем движении штоков 15 вниз (после установки листа на полку 4) подпружиненные клиновые скалки 14 под действием неподвижных упоров 31 утапливаются и освобождают ролики 13 упоров 12. Упоры 12,
не удерживаемые скалками 14, под действием собственного веса поворачиваются вокруг своих шарниров, освобождая путь листу, установленному на полку 4 элеватора 1.
После установки листа на полку 4 элеватора 1 дается команда на включение привода его цепей. При перемещении листы, находящиеся па полках 4 элеватора 1, поддерживаются iB вертикальном положении подпружиценными роликами 27, смонтированными на направляющих линейках 24, 25 и 28. После перемещения листов полочным элеватором I на один щаг привод его цепей отключается. При этом рама 7 освобождается от листа, поступивщего на ее ролики с подающего конвейера, а на закрытые рычажные замки рамы 8 устанавливается лист, перемещаемый полочным элеватором 1.
При отключении привода цепей полочного элеватора 1 дается команда на срабатывание силовых цилиндров 11. Сжатый воздух, поступая в левые полости цилиндров 11, переводит их поршни вправо. При этом скалки 17 запирающих золотников под действием своих пруЖин входят в кольцевые проточки штоков 15, а клиновые скалки 14, освободившись от воздействия упоров 31, за счет контакта своих скосов с роликами 13 поворачивают упоры 12 и запирают их в исходном положении.
После этого дается команда на включение привода звездочек 10, которые, враш,аясь, приводят в движение цепные связи 9. Рамы 7 и 8 под действием движущихся связей 9, поворачиваясь, занимают горизонтальное положение. В конце поворота рамы 8 рычаги 18, поворачиваясь под действием упоров 21 против часовой стрелки, освобождают рычаги 19. Последние занимают наклонное положение, открывая путь вправо листу, находящемуся «а роликах рамы 8. Цикл повторяется.
При транспортировании листов снизу вверх устройство работает аналогичным образом, только в обратном порядке.
Предмет изобретения
1.Устройство для транспортирования плоских изделий в вертикальном направлении, например листов стекла, содержащее полочный элеватор и механизмы загрузки и выгрузки, отличаюш;ееся тем, что, с целью повышения эффективности работы устройства механизмы загрузки и выгрузки выполнены в вчде двух поворотных роликовых рам, кинематически связанных между собой гибкими связями.
2.Устройство по п. 1, отличающееся тем, что загрузочная рама снабжена удерживающим изделие механизмом в виде силового цилиндра, па штоке которого шарнирно установлен упор, (кине.матически связанный с подпружиненной клиновой скалкой, взаимодействующей с неподвижным упором, закрепленным на раме элеватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Полочный элеватор | 1988 |
|
SU1565787A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Установка для литья под низким давлением | 1990 |
|
SU1792798A1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
| Линия для производства керамической плитки | 1985 |
|
SU1284837A1 |
| Установка для зачистки проката | 1985 |
|
SU1424989A1 |
| Устройство для хранения и транспортирования штучных изделий | 1978 |
|
SU745793A1 |
| Установка для ассортиментного комплектования контейнеров лотками с хлебобулочными изделиями | 1974 |
|
SU552945A1 |
| Установка для многономенклатурной штамповки полосового материала различной толщины | 1982 |
|
SU1069908A1 |
7777
шА
Pus. 2
13
w/ff
9иг.З
4
МЛ
6 5
23(pvs8
