1
Изобретение предназначено для перегрузки и штабелирования изделий и может быть использовано на заводах строительной индустрии, электрокерамической промышленности и т. д.
Известно устройство для остановки передаточной тележк И, содержащее раму, в направляющих которой установлена тележка с захватом грейферного типа, и привод.
Недостатком такого устройства является необходимость визуальной остановки тележки при штабелировании изделий, что снижает производительность труда.
Цель изобретения - повыщение производительности труда.
Это достигается тем, что .в предлагаемом устройстве на тележке смонтирован упор, взаимодействующий с рычагом храпового механизма, храповое колесо которого закреплено на валу, снабженном кулачками, опирающпмися .на подпружиненные рычаги адресных пластин бесконтактного датчика остановки тележки.
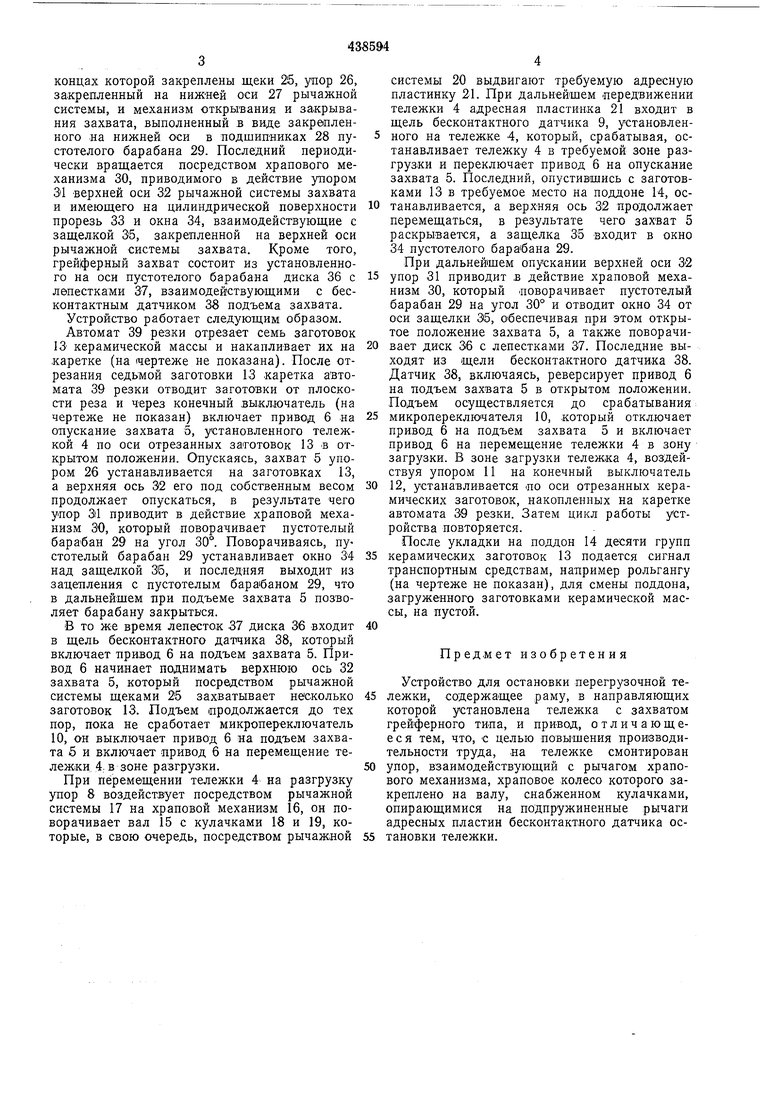
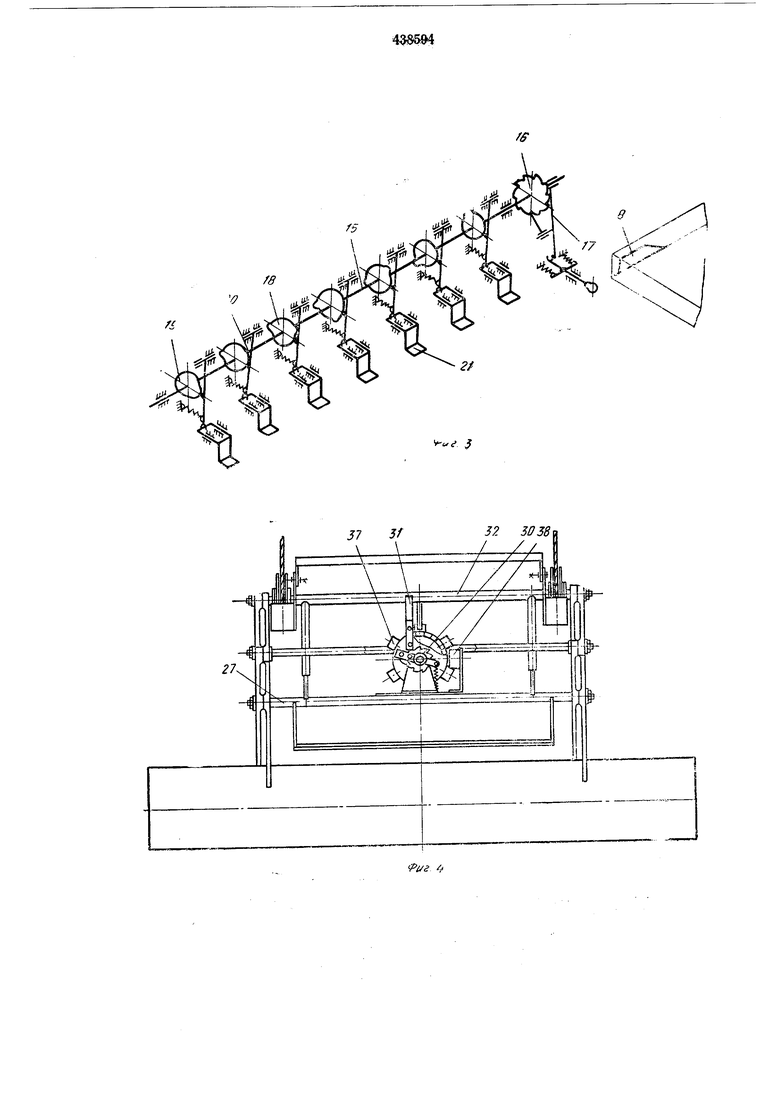
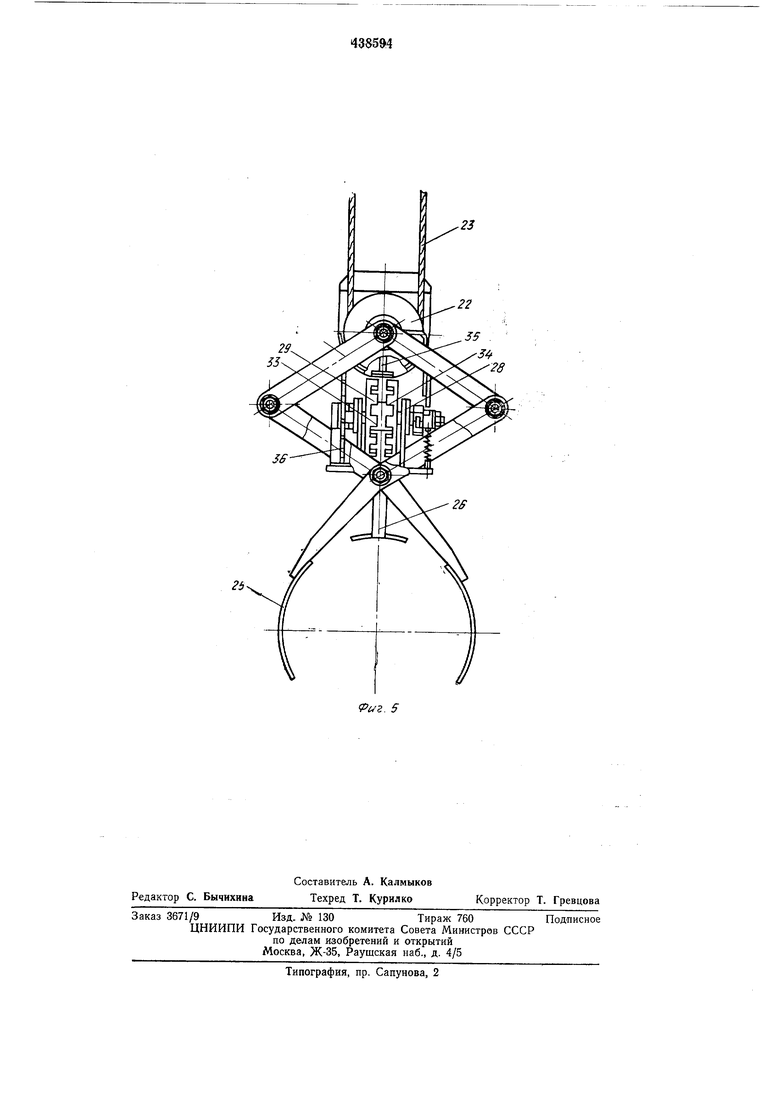
На фиг. 1 изображено предлагаемое устройство для остановки перегрузочной тележки, общий вид; на фиг. 2 - то же, вид сбоку; па фиг. 3 - схема механизма адресовки остановки тележки; на фиг. 4 -грейферный захват, общий вид; па фиг. 5 - то же, вид сбоку.
Устройство для остановки перегрузочной телел ки состоит из рамы 1, в направляющих 2 которой па катках 3 установлена тележка 4, несущая захват 5, привода 6 для перемещения тележки и подъема и опускания захвата, механизма 7 изменения адреса остановки тележки, управляемого упором 8, расположенным на тележке, бесконтактного датчика 9, управляющего остановкой привода передвиженин тележки но позициям разгрузки, микропереключателя 10, ограничивающего высоту подъема захвата и закрепленного на тележке упора 11, воздействующего на конечный выключатель 12, управляющий остановкой тележки относительно оси загрузки захвата.
Механизм изменения адреса остановки тележки установлен на раме в зоне укладки заготовок 13 на поддон 14 и состоит из вала 15,
периодически вращающегося посредством храпового механизма 16, приводимого в действие через рычажную систему 17 упором тележки и имеющего кулачки 18 и 19, выдвигающие посредством рычажной системы 20 подпружипенные адресные пластинки 21, взаимодействующие с бесконтактным датчиком остановки тележки по позициям разгрузки.
Захват (фиг. 4, 5) блоками 22 на тросах 23 установлен на тележке и включает рычажную
систему 24 захвата грейферного типа, на концах которой закреплены щеки 25, упор 26, закрепленный на нижней оси 27 рычажной системы, и механизм открывания и закрывания захвата, выполненный в виде закрепленного на нижней оси в подшипниках 28 пустотелого барабана 29. Последний периодически вращается посредством храпового механизма 30, приводимого в действие упором 31 верхней оси 32 рычажной системы захвата и имеющего на цилиндрической поверхности прорезь 33 и окна 34, взаимодействующие с защелкой 36, закрепленной на верхней оси рычажной системы захвата. Кроме того, грейферный захват состоит из установленного на оси пустотелого барабана диска 36 с лепестками 37, взаимодействующими с бесконтактным датчиком 38 подъема захвата. Устройство работает следующим образом. Автомат 39 резки отрезает семь заготовок 13 керамической массы и накапливает их на каретке (на чертеже не показана). После отрезания седьмой заготовки 13 каретка автомата 39 резки отводит заготовки от плоскости реза и через конечный выключатель (на чертеже не показан) включает привод 6 на опускание захвата 5, установленного тележкой 4 по оси отрезанных заготовок 13 в открытом положении. Опускаясь, захват 5 упором 26 устанавливается на заготовках 13, а верхняя ось 32 его под собственным весом продолжает опускаться, в результате чего упор 31 приводит в действие храповой механизм 30, который поворачивает пустотелый бара-бан 29 на угол 30°. Поворачиваясь, пу стотелый барабан 29 устанавливает окно 34 над защелкой 36, и последняя выходит из зацепления с пустотелым барабаном 29, что в дальнейшем при подъеме захвата 5 позволяет барабану закрыться. В то же время лепесток 37 диска 36 входит в щель бесконтактного датчика 38, который включает привод 6 на подъем захвата 5. Привод 6 начинает поднимать верхнюю ось 32 захвата 5, который посредством рычажной системы щеками 25 захватывает несколько заготовок 13. Подъем продолжается до тех пор, пока не сработает микропереключатель 10, он выключает привод 6 на подъем захвата 5 и включает привод б на перемещение тележки 4-в зоне разгрузки. При перемещении тележки 4 на разгрузку упор 8 воздействует посредством рычажной системы 17 на храповой механизм 16, он поворачивает вал 15 с кулачками 18 и 19, которые, в свою очередь, посредством рычажной системы 20 выдвигают требуемую адресную пластинку 21. При дальнейшем передвижении тележки 4 адресная пластинка 21 входит в щель бесконтактного датчика 9, установленного на тележке 4, который, срабатывая, останавливает тележку 4 в требуемой зоне разгрузки и переключает привод 6 на опускание захвата 5. Последний, опустившись с заготовками 13 в требуемое место на поддоне 14, останавливается, а верхняя ось 32 продолжает перемещаться, в результате чего захват 5 раскрывается, а защелка 35 входит в окно 34 пустотелого барабана 29. При дальнейшем опускании верхней оси 32 упор 31 приводит Б действие храповой механизм 30, который .поворачивает пустотелый барабан 29 на угол 30° и отводит окно 34 от оси защелки Э5, обеспечивая при этом открытое положение захвата 5, а также поворачивает диск 36 с лепестками 37. Последние выходят из щели бесконтактного датчика 38. Датчик 38, включаясь, реверсирует привод 6 на подъем захвата 5 в открытом положении. Подъем осуществляется до срабатывания микропереклю1чателя 10, который отключает привод 6 на подъем захвата 5 и включает привод 6 на перемещение тележки 4 в зону загрузки. В зоне загрузки тележка 4, воздействуя упором 11 на конечный выключатель 12, устанавливается ло оси отрезанных керамических заготовок, накопленных на каретке автомата 39 резки. Затем цикл работы устройства повторяется. После укладки на поддон 14 десяти групп керамических заготовок 13 подается сигнал транспортным средствам, например рольгангу (на чертеже не показан), для смены поддона, загруженного заготовками керамической массы, на пустой. Предмет изобретения Устройство для остановки перегрузочной тележки, содержащее раму, в направляющих которой установлена тележка с захватом грейферного типа, и привод, отличающееся тем, что, с целью повышения производительности труда, на тележке смонтирован упор, взаимодействующий с рычагом храпового механизма, храповое колесо которого закреплено на валу, снабженном кулачками, опирающимися на подпружиненные рычаги адресных пластин бесконтактного датчика остановки тележки. ( 3 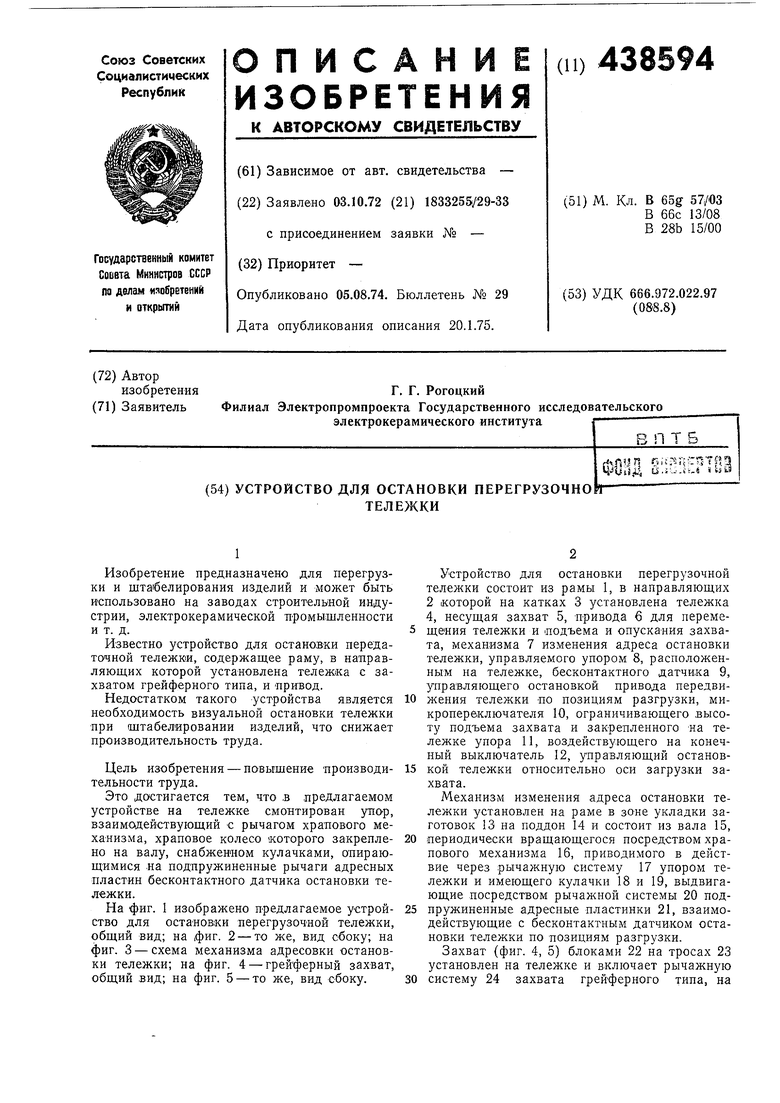
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Устройство к ножницам для укладки листовых заготовок в стопу | 1986 |
|
SU1318353A1 |
| Устройство для останова в заданной позиции перегрузочной каретки пакетоформирующей машины | 1990 |
|
SU1791303A1 |
| Гибкая автоматизированная система | 1987 |
|
SU1562107A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для гибки деталей | 1981 |
|
SU967611A2 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| Станок для нарезания зубьев на гребенках | 1934 |
|
SU39968A1 |
52 37 3f L 3038 //
23
иг. 5
