1
Изобретение относится к автоматическим грузоподъемным захватам, например, к захватам пакетов кирпича или штучного груза.
Известны устройства для автоматического управления захватом, содержащие коробчатый корпус, жестко соединенный с рамой захвата, свободно расположенный внутри корпуса ползун, подвешиваемый к крюку грузоподъемного крана, и фиксируюш,ий механизм.
Недостатком известных устройств является их непродолжительный орок службы при работе на площадке, имеющей даже незначительный наклон к горизонтальной плоскости, а также при подъеме неравномерно расположенного груза.
Цель изобретения - повышение надежности в работе и увеличение срока службы устройства.
Для этого в предлагаемом устройстве фиксирующий механизм выполнен в виде щарнирно установленного на ползуне маятникового якоря, выполненного с кромкой, зацепляющейся с пальцем, закрепленным в корпусе, а на ползуне шарнирно установлен двуплечий рычаг, взаимодействующий одним плечом с ползуном, а в другое его плечо вставлен подпружиненный стержень, шарнирно соединенный с якорем.
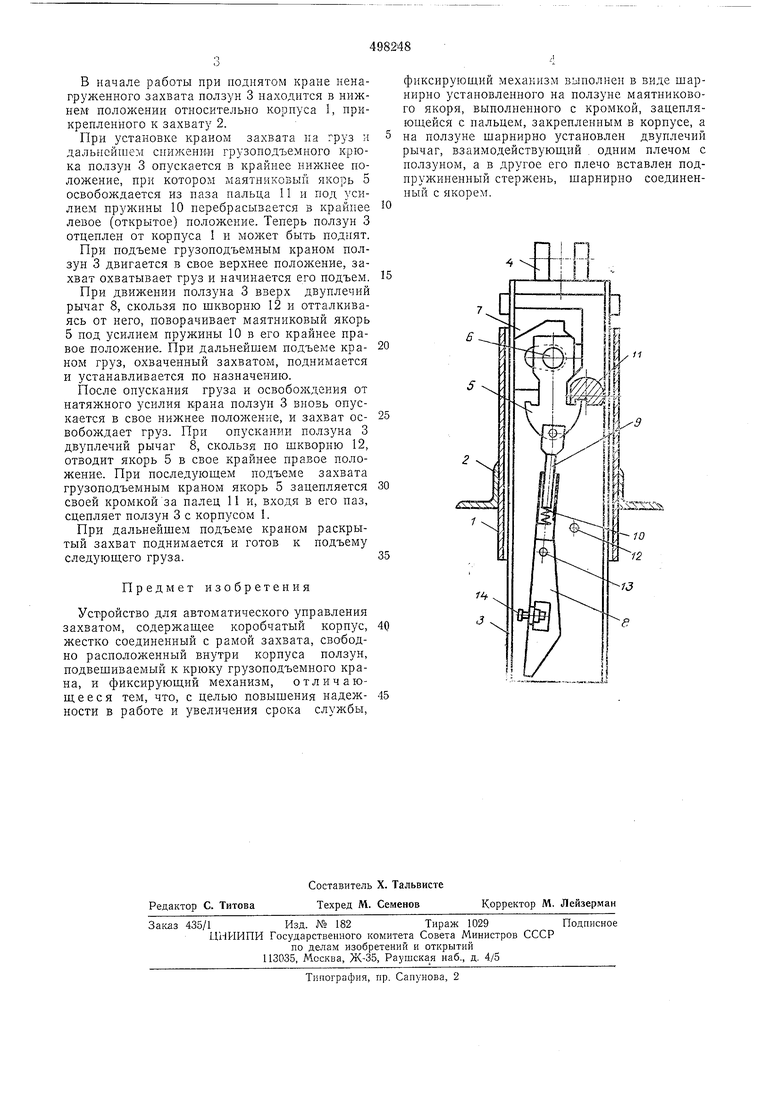
На чертеже изображено предлагаемое устройство.
Внутри корпуса 1, выполненного в виде коробчатой стойки и жестко соединенного с рамой грузоподъемного захвата 2, свободно расположен ползун 3 из швеллера, вертикально подвешенного к крюку крана носредством петель 4.
Фиксирующий механизм выполнен в виде шарнирно установленного на ползуне 3 маятникового якоря 5 с кромкой, свободно подвешенного на пальце 6. Последний упирается в гнезде двух крайних из трех параллельных ползуну пластин 7.
На ползуне 3 шарнирно установлен двуплечий рычаг 8, взаимодействующий одним концом с ползуном, а в другое его плечо вставлен стержень 9, снабженный пружиной 10 и шарнирно соединенный с якорем 5.
К корпусу 1 прикреплены палец 11 с пазом, в который при зацеплении заходит кромка якоря 5, и шкворень 12.
Двуплечий рычаг 8 установлен на опорном болту 13, прикрепленном к ползуну 3. Размах движения двуплечего рычага 8 регулируется винтом 14.
Средняя из трех пластин 7 имеет выступы, в которые своими верхними углами упирается якорь 5, фиксируя его крайние - левое (открытое) и правое (зацепляющее)-положения под усилием пружины 10.
Устройство работает следующим образом.
В начале работы при поднятом кране ненагрул :енного захвата ползун 3 находится в нижнем положении относительно корпуса 1, прикрепленного к захвату 2.
При установке краном захвата на груз и дальнейшем снижении грузоподъемного крюка ползун 3 опускается в крайнее нижнее положение, при котором маятниковый якорь 5 освобождается из паза пальца 11 и под усилием пружины 10 перебрасывается в крайнее левое (открытое) положение. Теперь ползун 3 отцеплен от корпуса 1 и может быть поднят. При подъеме грузоподъемным краном ползун 3 двигается в свое верхнее положение, захват охватывает груз и начинается его подъем. При движении ползуна 3 вверх двуплечий рычаг 8, скользя по шкворню 12 и отталкиваясь от него, поворачивает маятниковый якорь 5 под усилием пружины 10 в его крайнее правое положение. При дальнейшем подъеме краном груз, охваченный захватом, поднимается и устанавливается по назначению.
После опускания груза и освобождения от натяжного усилия крана ползун 3 вновь опускается в свое нижнее положение, и захват освобождает груз. При опускании ползуна 3 двуплечий рычаг 8, скользя по шкворню 12, отводит якорь 5 в свое крайнее правое положение. При последуюшем подъеме захвата грузоподъемным краном якорь 5 зацепляется своей кромкой за палец 11 и, входя в его паз, сцепляет ползун 3 с корпусом 1.
При дальнейшем подъеме краном раскрытый захват поднимается и готов к подъему следующего груза.
Предмет изобретения
Устройство для автоматического управления захватом, содержащее коробчатый корпус, жестко соединенный с рамой захвата, свободно расположенный внутри корпуса ползун, подвешиваемый к крюку грузоподъемного крана, и фиксирующий механизм, отличающееся тем, что, с целью повышения надежкости в работе и увеличения срока службы.
фиксирующий механизм выполнен в виде шарнирно установленного на ползуне маятникового якоря, выполненного с кромкой, зацепляющейся с пальцем, закрепленным в корпусе, а на ползуне шарнирно установлен двуплечий рычаг, взаимодействующий . одним плечом с ползуном, а в другое его плечо вставлен подпружиненный стержень, шарнирно соединенный с якорем.
,b: ss::i2si
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Клещевой захват-кантователь | 1981 |
|
SU975559A1 |
| Захватное устройство | 1990 |
|
SU1792908A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| Наклонная подвесная канатная дорога | 1958 |
|
SU118843A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
