Изобретение относится к грузозахватным устройствам и может быть использовано в захватах с дистанционным управлением, удерживающим изделия круглого, шестигранного, квадратного и плоского профиля
Известны захваты, содержащие корпус, два шарнирно соединенных с корпусом наружных рычага с рабочими губками, две дополнительные губки и механизм привода наружных рычагов.о Для пе)ехода. на изделие другого диаметра необходима непосредственная регулировка дополнительных губок, что ограничивает возможность применения захвата в зоне, недоступной для человека, например радиоактивной, где захватывание и транспортировка изделий производится с помощью манипулдТОрОВо
Целью изобретения является обеспечение дистанционной автоматической установки дополнительных губок в соответствии с диаметром захватываемого изделия о
Предлагаемый захват снабжен внутренними рычагами, шарнирно укрепленными в корпусе, на которых установлены дополнительные губки в виде двуплечих рычагово Губки связаны внешним плечом посредством серьги с наружными рычагами, на которых шаркирно укреплены рабочие губки,
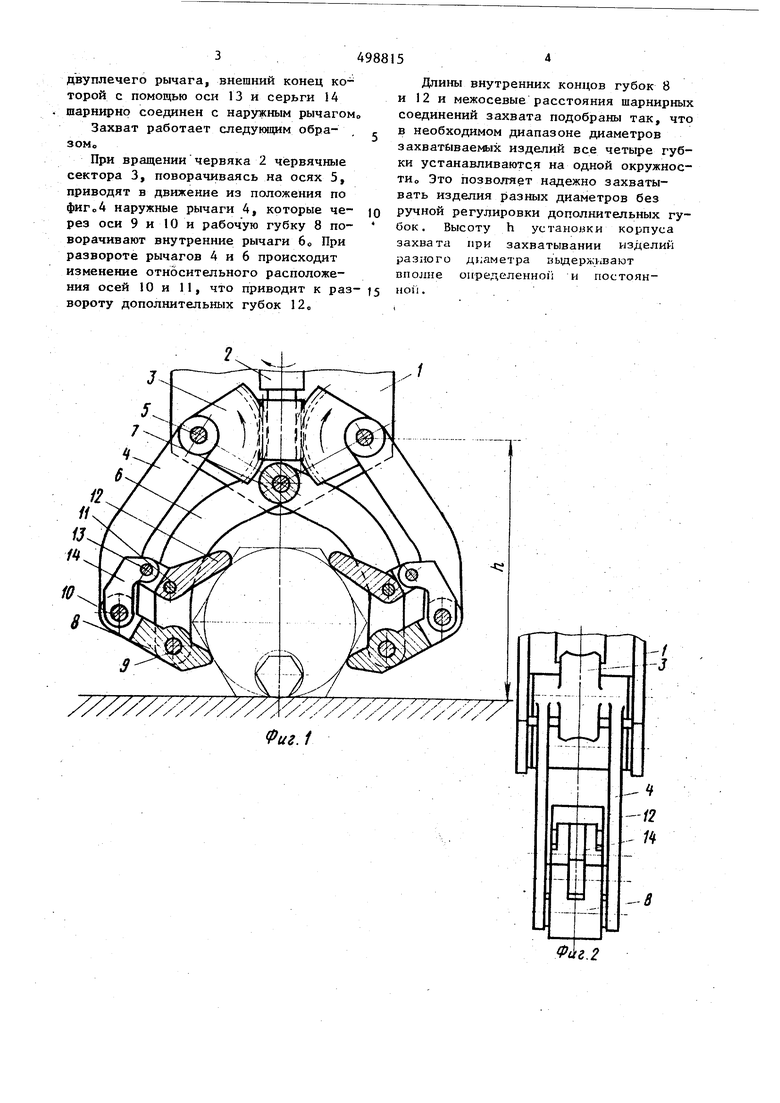
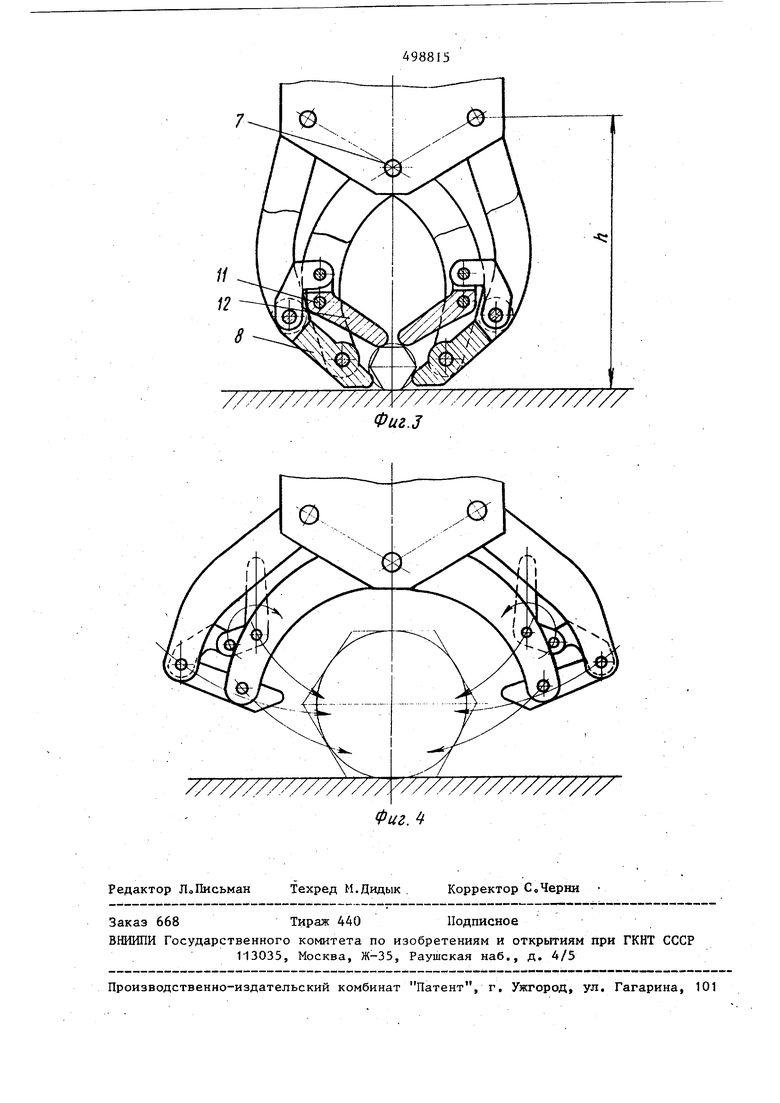
На фига1 схематически изображен описываемый захват с изделием наи- i большего сечения; на фиго2 - вид устройства сбоку} нд фигоЗ - захват с изделием иаимеиьщего сечения; на фиго4 - положение захвата с максимально разведенными рычагамИо
Захват содержит корпус 1, червяк 2 механизма привода, червячные сектора 3, выполненные на наружных рычагах 4, установленных на осях 5о Внутренние рычаги 6 смонтированы на общей оси 7о Рабочая губка 8 шарнирно соединена осями 9 и 10 соответственно с внутренним и наружным рычагами На внутреннем рь1чаге на оси 1 I установлена дополнительная губка 12 в виде
двуплечего рычага, внешний конец которой с помощью оси 13 и серьги 14 шарнирно соединен с наружным рычагом Захват работает следующим обра- ,
ЗОМо
При вращении червяка 2 червячные сектора 3, поворачиваясь на осях 5, приводят в движение из положения по фиго4 наружные рычаги 4, которые через оси 9 и 10 и рабочую губку 8 поворачивают внутренние рычаги 6о При развороте рычагов 4 и 6 происходит изменение относительного расположения осей 10 и 11, что приводит к раз вороту дополнительных губок 12
Длины внутренних концов губок 8 и 12 и межосевые расстояния шарнирных соединений захвата подобраны так, что в необходимом диапазоне диаметров захватываемых изделий все четыре губки устанавливаются на одной окружности Это позволяет надежно захватывать изделия разных диаметров без ручной регулировки дополнительных губок. Высоту h установки корпуса захвата при захватывании изделий разного Д1;аметра ньщерлснвают вполне оиределенно и постоянHoii.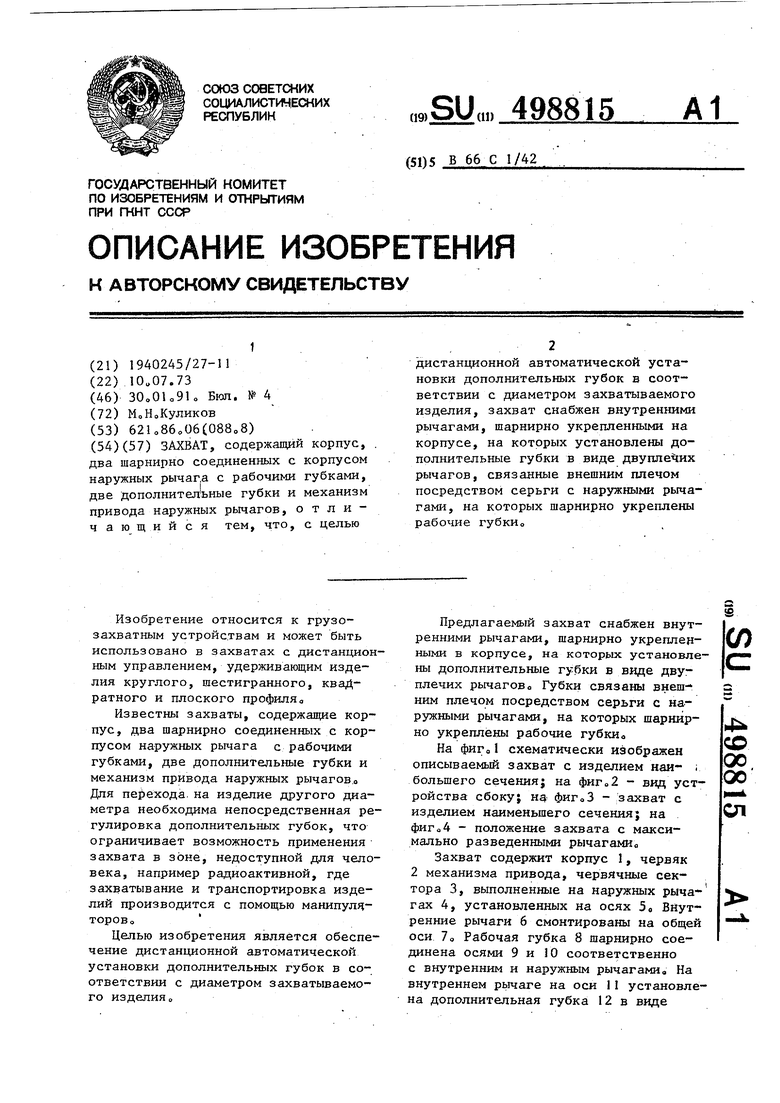
| название | год | авторы | номер документа |
|---|---|---|---|
| Переставитель стеклоизделий | 1974 |
|
SU525629A1 |
| Захват | 1975 |
|
SU550280A2 |
| Захват | 1972 |
|
SU440249A1 |
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| МАШИНА ДЛЯ ОБВЯЗЫВАНИЯ ТЮКОВ ПОЛОСОВЫМ ЖЕЛЕЗОМ | 1930 |
|
SU38583A1 |
| Захват | 1980 |
|
SU965764A2 |
| ЗАХВАТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ЗАХВАТЫВАНИЯ И ПЕРЕМЕЩЕНИЯ ПЛОСКИХ ПРЕДМЕТОВ | 2007 |
|
RU2428366C2 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
ЗАХВАТ, содержащий корпус, . два шарнирно соединенных с корпусом наружных рычаг.а с рабочими губками, две дополнител'ьные губки и механизм привода наружных рычагов, отличающийся тем, что, с цельюдистанционной автоматической установки дополнительных губок в соответствии с диаметром захватываемого изделия, захват снабжен внутренними рычагами, шарнирно укрепленными на корпусе, на которых установлены дополнительные губки в виде двугше«1их рычагов, связанные внешним плечом посредством серьги с наружными рычагами, на которых шарнирно укреплены рабочие губкио
/У/У/У//.
иг. 1
-/ -J
-/2 - Н
