Изобретение относится к автоматизации транспорта и может быть использовано, например, для выбора направления движения штабелеров.
Известно устройство для автоматического выбора направления движения объекта, содержащее командные блоки, датчики положения с двумя группами контактов, ключ управления с двумя группами контактов, одни выводы первой группы контактов которого соединены с одними выводами первой группы контактов датчиков положения, и источник питания, включенный между точкой соединения вторых выводов первой группы контактов датчиков положения и точкой соединения одних выводов командных блоков, другие выводы командных блоков соединены между собой через последовательно соединенные выводы второй группы контактов датчиков положения, точки последовательного соединения которых подключены к одним выводам второй группы контактов ключа управления, другие выводы первой и второй групп ключа соединены между собой в точке, к которой под- ключены через свои контакты другие выводы командных блоков.
Недостатком такого устройства является наличие большого числа контактов, что снижает его надежность.
Известно устройство для автоматического выбора направления движения объекта, содержащее задатчик адреса, выполненный в виде многопозиционного
vj
Os
сл
О
, Ю
переключателя, путевые выключатели с двумя размыкающими контактами, один из выводов первого размыкающегося контакта соединен с соответствующим неподвижным контактом многопозиционного пере- ключателя, а вторые размыкающие контакты всех путевых выключателей соединены между собой в последовательную цепь, начало и конец которой подключены к одним выводам обмоток соответственно од- ного и другого реле выбора направления движения, а другие выводы этих реле подключены к одному из выводов источника питания, к другому выводу источника питания подключен контакт многопозиционного переключателя, при этом прерыватель, выполненный в виде лыжи, расположен на объекте и длина его больше выбега объекта. Недостатками известного устройства являются наличие механического контакта прерывателя с путевым выключателем, наличие большого количества контактов путевых выключателей, что снижает надежность устройства.
Наиболее близким по технической сущ- ности к предлагаемому является устройство для автоматического выбора направления движения объекта, содержащее задагчик программы, блоки управления, выполненные каждый из последовательно соединен- ных логических элементов 2И-2ИЛИ, прямой вход каждого из которых соединен с соответствующим выходом задатчика программы, усилители приводов движения Вперед и Назад, выход первого из кото- рых соединен с выходом последнего логического элемента 2И-2ИЛИ одного из блоков управления, а второго - с выходом первого логического элемента 2И-2ИЛИ другого блока управления, элемент ИЛИ датчика по- ложения и реверсивный счетчик с дешифратором, счетный вход которого соединен через элемент ИЛ И сдатчиками положения, информационные входы Сложение и Вычитание - с выходом соответственно пер- вого и второго блоков управления, а выходы - с инверсионными входами соответствующих элементов 2И-2ИЛИ обоих блоков управления,
Недостатком известного устройства является большое количество датчиков положения - по числу позиций и выдача с этих датчиков числоимпульсного кода о положении объекта, что снижает его надежность.
Целью изобретения является повыше- ние надежности устройства.
Поставленная цель достигается тем, что в устройство, содержащее блок адресования, включающий кнопочные выключатели, которые одними выводами подключены к
одному из выводов источника питания, то- коограничивающие резисторы, одним выводом подключенные ко второму выводу источника питания, элемент ИЛИ, входы которого подключены к входам блока определения положения объекта, включающего бесконтактные путевые выключатели, расположенные на объекте и взаимодействующие с металлическими пластинами, расположенными в определенном коде и установленные на каждой позиции по трассе движения, преобразователь десятичного кода в двоичный, выходы которого подключены ко вторым выходам соответствующих кнопочных выключателей блока адресования и токоограничивающих резисторов, а выходы подключены к первым входам блока определения направления движения, выполненного по схеме сравнения двух чисел на полных сумматорах и элементах И-НЕ, согласно изобретению введены три элемента НЕ и три элемента И-НЕ соответственно по одному для каждого выхода блока определения направления движения и два триггера, R-входы которых соединены с выходом первого элемента И-НЕ, первый вход которого соединен с выходом соответствующего ему элемента НЕ, вход которого соединен с выходом блока определения направления движения и с первыми входами двух других элементов И-НЕ, вторые входы которых соединены с выходами соответствующих им двух других элементов НЕ, входы которых соединены с соответствующими выходами блока определения направления движения, второй вход первого элемента И-НЕ подключен к. выходу элемента ИЛИ, а выходы двух других элементов И-НЕ подключены к S-входам соответствующих им триггеров.
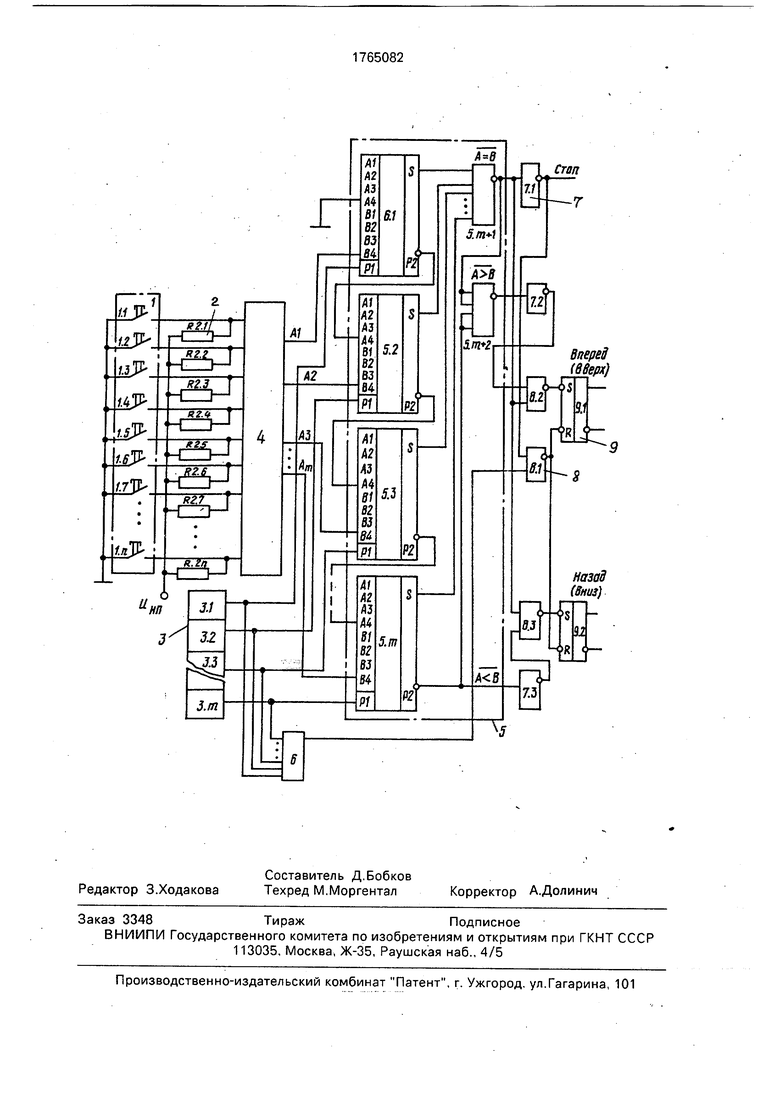
На чертеже представлена принципиальная схема предлагаемого устройства.
Устройство содержит блок 1 адресования, включающий кнопочные выключатели 1.1-1.П, которые одним выходом подключены к одному из выводов источника питания, токоограничивающие резисторы 2.1-2.П, блок 3 определения положения объекта, включающий бесконтактные путевые выключатели, которые расположены на объекте в количестве, равном числу разрядов в кодепоследней позиции, и взаимодействуют с металлическими пластинами, расположенными в определенном коде и установленными по трассе движения с изменением кода в местах остановок, преобразователь 4 десятичного кода в двоичный, входы которого соединены со вторыми выходами соответствующих кнопочных выключателей блока 1 адресования и
токоограничивающих резисторов 2.1-2.П, а выходы соединены с соответствующими первыми входами В4 блока 5 определения направления движения, вторый входы Р1 которого соединены с выходами соответствующих бесконтактных путевых выключателей и входами элемента б ИЛИ, а выходы подключены к соответствующим им элементам 7.1-7,3 НЕ, выходы которых подключены к входам соответствующих им элементов 8.1-8,3 И-НЕ, триггеры 9.1, 9.2, R-входы которых подключены к выходу элемента 8,1 И-НЕ, а S-входы подключены соответственно к выходам элементов 8.2, 8.3 И-НЕ.
Устройство работает следущим образом.
В исходном состоянии пусть объект находится на остановке у первой позиции. Кнопочный выключатель 1.1 включен. В этом случае сигнал в десятичном коде, подаваемый с блока 1 адресования кнопочным выключателем 1.1 на вход преобразователя
4десятичного кода в двоичный, преобразуется и подается на первые входы В4 блока
5определения направления движения, на вторые его входы Р1 поступает сигнал 1 в этом же коде с выходов бесконтактных путевых выключателей 3.1-З.т блока 3 определения положения объекта, который одновременно поступает и на входы элемента 6 ИЛИ. На выходе блока 5 определения направления вижения будет присутствовать сигнал (стоп), который поступает на один из входов элемента 8.1 И-НЕ, а на другой его вход поступает сигнал 1 с выхода элемента 6 ИЛИ. На выходе элемента 8.1 И-НЕ будет присутствовать сигнал низкого уровня О, который, поступая на R-входы триггеров, приводит их в исходное состояние.
Если объект необходимо отправить, например, на четвертую позицию, то нужно нажать кнопочный выключатель 1.4. В этом случае десятичный код числа 4 преобразуется в двоичный преобразователем 4 и с выходов AI-Am подается на входы В4 блока 5 определения направления движения. На вторые его входы Р1 будет поступать код единицы с выходов бесконтактных выключателей 3.1-З.т. Этот сигнал поступает одновременно и на входы элемента 6 ИЛИ. На выходе блока 5 определения направления движения появится сигнал (вперед), а с выхода элемента 7.1 НЕ на вход элемента 8.1 И-НЕ поступает сигнал низкого уровня О. На выходе элемента 8.1 уста- новится сигнал высокого уровня 1. Сигнал низкого уровня О через элемент 7.2 НЕ подается на вход элемента 8.2 И-НЕ, на другой ее вход сигнал 1 подается с выхода
элемента 7,1 НЕ. На выходы элемента 8.2 И-НЕ устанавливается сигнал низкого уровня О и триггер 9.1 переводится в единичное состояние. Сигнал Вперед передается
на привод и объект начнет перемещаться вперед (вверх), отъезжая от кодовых пластин. Триггер 9.1 не будет приведен в исходное состояние (нулевое), так как на выходе элемента 8.1 И-НЕ будет присутствовать
0 сигнал высокого уровня 1. При достижении четвертой позиции с выходов бесконтактных выключателей 3,1-З.т поступит код числа 4 и на выходе блока 5 определения направления движения появится сигнал
5 (стоп), который подается через элемент 7.1 НЕ на привод и вход элемента 8.1 И-НЕ, на другой вход которого подается сигнал высокого уровня 1 с выхода элемента 6 ИЛИ. На выходе элемента 8.1 И-НЕустанав0 ливается сигнал низкого уровня О и триггер приводится в исходное состояние. С появлением сигнала исчезает сигнал и соответственно на S-входе триггера 9.1 устанавливается сигнал высокого уровня
5 1. Объект останавливается.
При необходимости отправить объект на третью позицию следует нажать кнопочный выключатель 1.3. В этом случае на входы В4 блока 5 определения направления
0 движения поступит код числа 3, а на входах Р1 останется прежний код числа 4, на выходе соответственно появится сигнал (назад), а сигнал исчезнет. С выхода элемента 7.1 НЕ на вход элемента 8.1
5 И-НЕ поступит сигнал низкого уровня О, соответственно на выходе этого элемента установится сигнал высокого уровня 1. Сигнал через элемент 7.3 НЕ поступает на вход элемента 8.3 И-НЕ, на второй вход
0 которого поступает сигнал высокого уровня с выхода , на выходе его соответственно устанавливается сигнал низкого уровня О, и триггер 9.2 переводится в единичное состояние. С выхода триггера 9.2 сигнал На5 зад подается на привод и объект начинает перемещаться назад (вниз). При достижении объектом кодовых пластин с числом 3 (заданной позиции) коды чисел на входах В4 и 4 Р1 блока 5 выбора направления
0 движения сравняются и на его выходе появится сигнал (стоп). Соответственно на R-входе триггера 9.2 появится сигнал низкого уровня О, а на S-входе сигнал высокого уровня 1 и триггер переведется в нулевое
5 состояние. Объект остановится. Аналогично объект можно направить в любую заданную позицию.
В качестве бесконтактных путевых выключателей могут быть использованы серийно выпускаемые отечественной
промышленностью бесконтактные путевые переключатели БВК-24, КВД-25, КВП-8, КВП-16, БТП и другие.
В качестве преобразователя 4 десятичного кода в двоичный может быть использован преобразователь десятичного кода в двоично-десятичный.
В качестве блока 5 определения направления движения может быть использована схема сравнения двух четырехразрядных чисел.
В качестве элементов НЕ, И-НЕ могут быть использованы серийно выпускаемые микросхемы соответственно К 155 ЛН1, К 155 ЛА2 или другие аналогичные микросхемы, выпускаемые отечественной промышленностью.
Использование предлагаемого устройства позволяет уменьшить количество бесконтактных путевых выключателей в блоке положения объекта, повысить стабильность работы, что в целом повышает надежность устройства, а также уменьшить эксплуатационные расходы на обслуживание предлагаемого устройства и уменьшить время простоя.
Формула изобретения .Устройство для автоматического выбора направления движения объекта, содержащее блок адресования, включающий кнопочные выключатели, которые одними выводами подключены к одному из выводов источника питания, токоограничивающие резисторы, одним выводом подключенные ко второму выводу источника питания, блок определения положения объекта, включающий бесконтактные путевые выключатели, расположенные на объекте и взаимодействующие с металлическими пластинами, рас- положенными в определенном коде и
установленными по трассе движения, преобразователь десятичного кода в двоичный, входы которого подключены к вторым выводам соответствующих кнопочных выключателей блока адресования и к вторым
выводам токоограничивающих резисторов, а выходы подключены к первым входам блока определения направления движения, выполненного по схеме сравнения двух чисел на полных сумматорах и элементах И-НЕ,
элемент ИЛИ, входы которого подключены к выходам блока определения положения объекта, отличающееся тем, что, с целью повышения надежности, в него введены три элемента НЕ и три элемента И-НЕ,
соответственно по одному для каждого выхода блока определения движения, и два триггера, причем R-входы обоих триггеров соединены с выходом первого элемента И- НЕ, первый вход которого соединен с выходом соответствующего ему элемента НЕ, вход которого соединен с выходом блока определения направления движения и с одним из входов двух других элементов И- НЕ, вторые входы которых соединены с выходами соответстующих им двух других элементов НЕ, входы которых соединены с соответствующими выходами блока определения напрвления движения, второй вход первого элемента И-НЕ подключен к выходу
элемаента ИЛИ, а выходы двух других элементов И-НЕ подключены к S-входам соответствующих им триггеров,
V
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| ДИСКРЕТНЫЙ ЭЛЕКТРОННЫЙ ЗАДАТЧИК ТЕМПЕРАТУРЫ | 1993 |
|
RU2067358C1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
| Устройство автоматического адресования на конвейере | 1985 |
|
SU1348272A1 |
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU800071A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1263598A1 |
| Устройство для автоматического управления вращением объекта | 1991 |
|
SU1774309A1 |
| УСТРОЙСТВО ДШ УПР^СРБЩСтеАМИТРАНСПОРТНЫМИ | 1971 |
|
SU433493A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1184768A1 |
| Устройство для позиционного управления объектом | 1986 |
|
SU1371955A1 |
Устройство содержит три элемента НЕ и три элемента И-НЕ, соответственно по одному для каждого выхода блока определения направления движения, и два триггера, причем R-входы обоих триггеров соединены с выходом первого элемента И-НЕ, первый вход которого соединен с выходом соответствующего ему элемента НЕ, вход которого соединен с выходом блока определения направления движения и с одним из входов двух других элементов И-НЕ, вторые входы которых соединены с выходами соответствующих им двух других элементов НЕ, входы которых соединены с соответствующими выходами блока определения направления движения; второй вход первого элемента И-НЕ подключен к выходу элемента ИЛИ, а выходы двух других элементов И-НЕ подключены к S-входам соответствующих им триггеров. В зависимости от кодов на входе блока определения направления движения, которые поступают с выходов блока положения объекта и блока адресования через преобразователь десятичного кода в двоичный на его выходе появляются сигналы Стоп, Вперед, Назад. 1 ил. сл С
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU621634A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического выбора направления движения объекта | 1980 |
|
SU910512A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU722828A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
