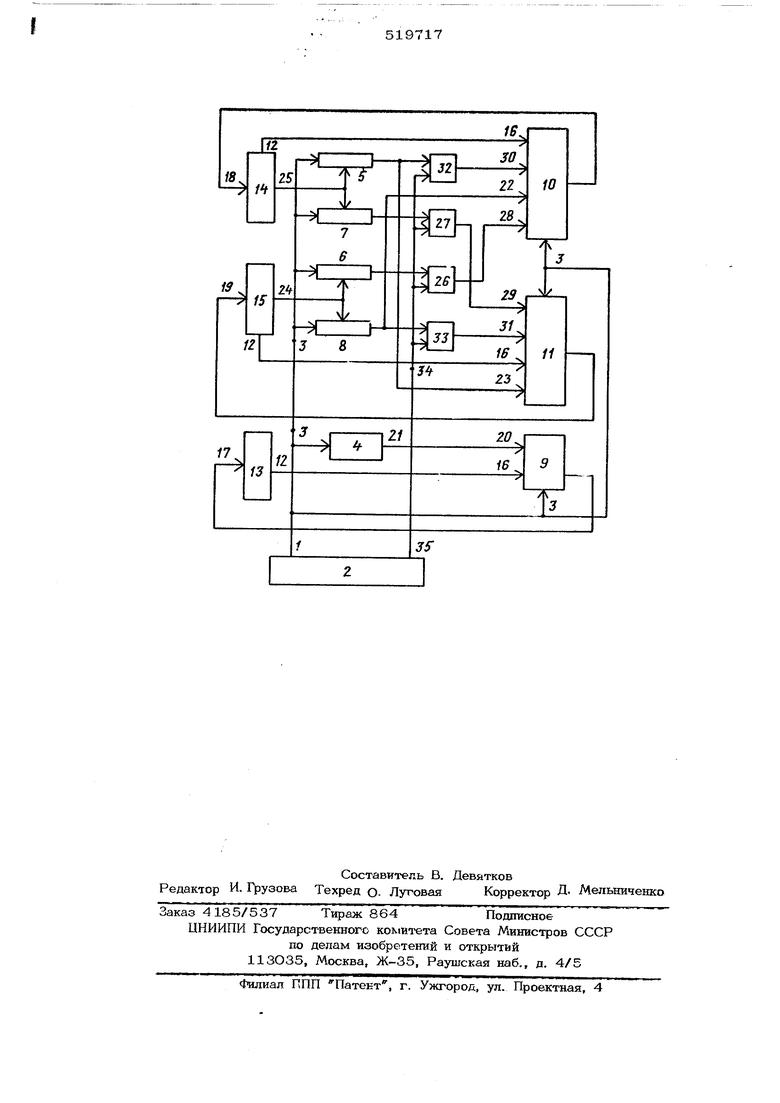
(54) УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТРИГОНОМЕТРИЧЕСКИХ ФУНКЦИЙ -оров, первые выходы первого, второго и ретьего регистров - соответственно с входами первого, второго и третьего :умматоров, выходы которых подключены :оответствешю к вторым входам первого, iTOporo и третьего регистров. Второй вход ерього сумматора связан с выходом блока амяти, вторые входь второго и третьего ;умматороБ соответственно через первый I второй узлы сдвига-с вторыми выходами второго и третьего регистров. Цель изобретения - повьииенке быстроцействия при втлчислекии трансцендентных {)ункций. Это достигается тем, что в устройство вЕ.едены третий и четвертый узлы сдвига и четыре переключателя. Входы третьего и четвертого узлов соединены соответственно с вторыми выходами второго и третьего регистров, выходы первого и четвертого узлов сдвига - с первыкт входами соответ ствекно первого и второго переключателей, выходьт которых подключены соответственно к третьему н четвертому входам второг cjN.-MaTOpa. Выходы второго и треа-ьего узлоЕ сдвига связаны с первыми входами соответственно третьего и четвертого пере ключателей, выходы которых подключены соответственно к третьему и четвс-рто1йу входам третьего сумматора. Вторьге входы переключателей соединены с выходом блока управления. Iia чертеже пре-дставлена схема устройства для вычисления труц-онометрических функций. Выход 1 блока 2 управления соединен с управляющими входами 3 блока 4 памяти, узлов 5-8 сдвига и сумматоров 9, 1О и 11, выходы 12 регистров 13, 14 и 15соответственно с первыми входами 16 сумматоров О, 1О п 11, выходь которых подключо |Ы гоотвеаственво к входам 17, 18, 19 реги; тров 13, 14, 15. Второй вход 2О сумматора 9 связан с выходом 2 блока 4 памяти, а вторые входы 22 и 23 сумматоров 1О и 11 соответственно через узлы 8 и 5 сдвига - с вторыми входами 24 и 25 регистров 15 и 14, соединенны ми соответственно через узлы б и 7 сдвига, переключатели 26 н 2.1 с третьими входами 28 и 29 сумматоров 1О и 11. При этом четвертые вход1-г ЗО и 31 сумматоров 1О и 11 соединеш.1 соответствегато через переключатели 32 и 33 с выходами уз лов 5 и 8. Вторые входы 34 переключателей 26, 27, 32 и 33 - с выходом 35 блока 2 управления. Устройство для вычисления тригонометических функций работает cлeayюiЩI. обраaoNt. Коэффициент компенсации методической погрешности 1/к есть величина постоянная для заданной точности вычисления и раскладывается в ряд вида тт-р 1/к o,f п ), где л - максимальное число итераций вычисления заданной функции, число которых зависит от заданной точности вычисления; Р - номер итераций из натурального ряда чисел, изменяющихся до п Например, для точности вычисления 2 при -П 22 ,6ОО7252 и может быть -)(1+2-) разложен 1/к О,5 )(1+2 (1+2 ( )(и-г-). Итерационные уравнения (1), (2) с учетом членов разложения коэффициента 1/к имеют вид -(4-2.) -Р г о,П(1+г ), (9) -(i-a Т1 -Р а0,5 П (1+г ) СЮ) Рассмотрим в качестве примера раОо-гу устройства для вычисления тригонометричес.ких функций на примере вычисления модуля и аргумента вектора согласно уравнениям (3), (4), (7), (1О). Необходимо по значениям начальных координат Q и VQ определить модуль вектора и аргумент. Оператор поворота вектора определяется при этом согласгс, функции | sigTi v . (11) Значения координат Х и VQ заносятся соответственно в регистры 14 и 15, сдвинутые на один разряд в сторону младших разрядов с тем, чтобы учесть сомножитель 0,5 в разложении коэффициента 1/К. В регистр 13 записывается нулевое значение аргумента оСд. При несовпадении номера итерации i и заачения номера степени р на входах ЗО и 28 сумматора Ю и 29 и 31 сумматора 11 имеется нулевая информация, для этого ин- фор1у:ация, поступающая на сумматоры с узлов 5, 6, 7 и 8 сдвига через переключатели 26, 27, 32 и 33, отключается сигналом управлент1я с выхода 35 блока 2 управления, идущего на входы 34 переключатепей. Процесс вычисления при этом происходит согласно уравнениям {1)-(4) и (11). При совпаде1ши номера итерации i и номера степени р вычисления ведутся по уравнениям (3), (4), (9)-(11). Переключатели 26, 27, 32 и .33 открыты по входам 34 сигналом уппаплопкя с выхода 35 блока управлекия, и на четыре входа 16, ЗО, 28 и 22 сумматора 1О поступает информация Х регистра 14 с выхода 12, информация,регистра 15, сдвинутая УЗЛОМ 8 V информация регистра 14, сдв нутая узлом 5, информация j Э. регистра 15, сдвинутая узлом 6. Результат суммирования в каждой итера ции переписывается в регистр 14, поступающий на вход 18, а результаты суммирования с выходов сумматоров 11 и 9 переписываются соответственно в регистры 15 и 13 по входам 19 и 17. Для управления блоком 4 памяти и узлами 5-8 необходимы сигналы управления по итерациям, которые поступают с выхода 1 блока 2 управления на их входы 3, Процесс суммиро вания согласно уравнению (3) происходит без изменений, при этом константа AXi с выхода 21 блока 4 памяти подается на вход 2О сумматора 9 и складывается с предыдуишм результатом сз1регистра 13 с выхода 12. Сигнал оператора поворота вектора t . , который зависит от знака числа регистра 15, вырабатывается блоком 2 управления и с его выхода 1 поступает на управляющий вход 3 сумматоров S, Ю и 11 Щ1Я регулирования процессом сум шрования -вычитания согласно уравнениям. По окончании процесса вычисления заданной функции в регистре 13 фиксируется аргумент, а в регистре 14 - значение величины вектора без методической погрешности, в регистре 15 - значение V. , близкое к нулевому. Таким образом,устройство позволяет повысить быстродействие вычисления тригонометрических функций за счет совмещения операции умноже гая на коэффициент 1/К с процессом вычтюления. Формула изобретения Устройство для вычисления тригоноглетрических функций, содержащее блок улравления, блок , узлы сдвига, сумматоры, регистры, выход блока управления соединен с управляющими Byioaatm блока памяти, узлов сдвига, сумматоров, первые выходы первого, второго и третьего регистров соединены соответственно с первыми Bxon.aNni первого, второго и третьего сумматоров, выходы которых соединены соответственно с вторыми входами первого, второго и третьего регистров, второй вход первого сумматора соединен с выходом блока памяти, вторые входы второго и третьего сумматоров соединены соответственно через первый и второй узлы сдвига с вторыми выходами второго и третьего регистров, о т л и чающееся тем, что, с целью повыщения быстродействия, оно содержит третий и четвертый узлы сдвига и четыре переключателя, входы третьего к четвертого узлоБ соединены соответственно с вторыми выходами второго и третьего регистров, вь;ходы первого и четвертого узлов сдвига соединены с первыми входами соответственно первого н второго переключателей, выходы которых соединены соответстве;;но с третьим h четвертым входами второго сумматора, а выходы второго и третьего узлов сдвига соединены с первыми входами соответственно третьего и четвертого переключателей, выходы которых соединены соответственно с третьим и четвертым входами третьего сумматора, вторые входы переключателей соединены с выходом блока управления. Источники информации, принятые во внимание при экспертизе: l.Votdep D.E-CORDlc.Trig-onomettic Computing- Technique.IRE Transections on ElectTonic Computers,Afe9,19f9, . 2. Парики. Система ДИВИК для сложных навигационных задач, SjieKipoHiiKd NO 18, 1966, стр. ЭО-38.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления тригонометрических функций | 1976 |
|
SU613328A1 |
| Устройство для вычисления элементарных функций | 1980 |
|
SU1035604A1 |
| Вычислительное устройство | 1986 |
|
SU1322270A1 |
| Устройство для вычисления гиперболических синуса и косинуса | 1987 |
|
SU1462300A1 |
| Устройство для вычисления тригонометрических функций | 1986 |
|
SU1370653A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОДУЛЯ ТРЕХМЕРНОГО ВЕКТОРА | 1993 |
|
RU2040039C1 |
| Устройство для вычисления функций | 1986 |
|
SU1374219A1 |
| Устройство для вычисления элементарных функций | 1980 |
|
SU1130861A1 |
| Устройство для выполнения преобразования координат | 1987 |
|
SU1462299A1 |
| Устройство для вычисления логарифма | 1987 |
|
SU1432513A1 |