(54) СТАНОК ДЛЯ ГИБК ЗМЕЕВИКОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Устройство для изготовления змеевиков | 1982 |
|
SU1160041A1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1156768A2 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
| Станок для изготовления змеевиков | 1981 |
|
SU997905A1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Станок для двухсторонней гибки труб | 1973 |
|
SU501802A1 |
| Трубогибочная машина | 1985 |
|
SU1299655A1 |
Изобретение (ymoctsrca к трубогибочяому производству, в частности к об орудоваяию ОЛЯ изготовления змеевиков.
По основному авт. св. № 507386 иэвестен станок для изготовления змеевиков, содержащий станину с взаимно перпет1дякулярными напра&ляюшимя, по которым могут п емещаться каретки, кинематически связанные между собой двуплечим шарни(жорычажяым механизмом.
Однако на этом станке яевоэмохшо осушествл5ггь гибку змеевюсов переменной конфигурации, что значительно снижает его тех нологические возможности.
Цель изобретения расшкрс яо технологвческях возможностей стеяка. 0
Это достигается тем, что кажда жарегка предлагаез юго станка снабжена устрсДством для ее вастройкк на задаовый шаг , содержащим подвижный отяосвтельао корпуса каретки ползун с устаистпснным яа нем реечним упором штя фиксацим шестврmi, приводимый в действие ciuioMiMi пвлвя- Лром, расположенным на каретке, в шверящ аю соедпненный с кареткой я штоком юааа
,дра при помощи колено-рычажного мехакяэ. ма.
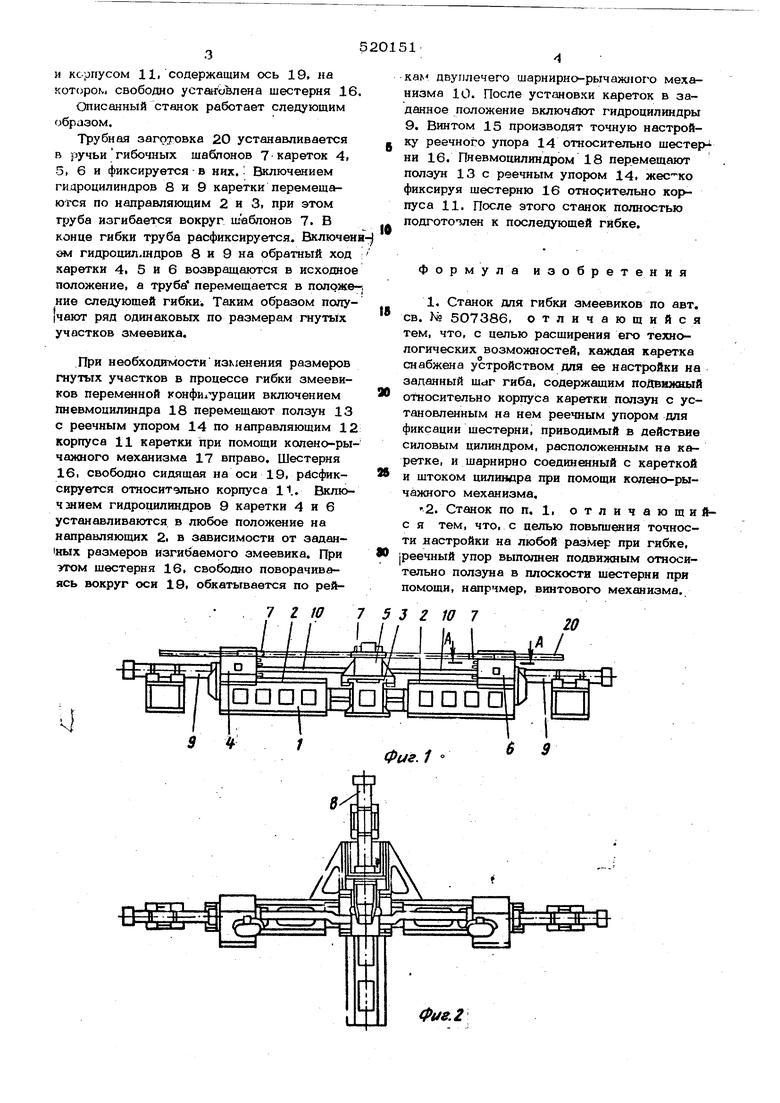
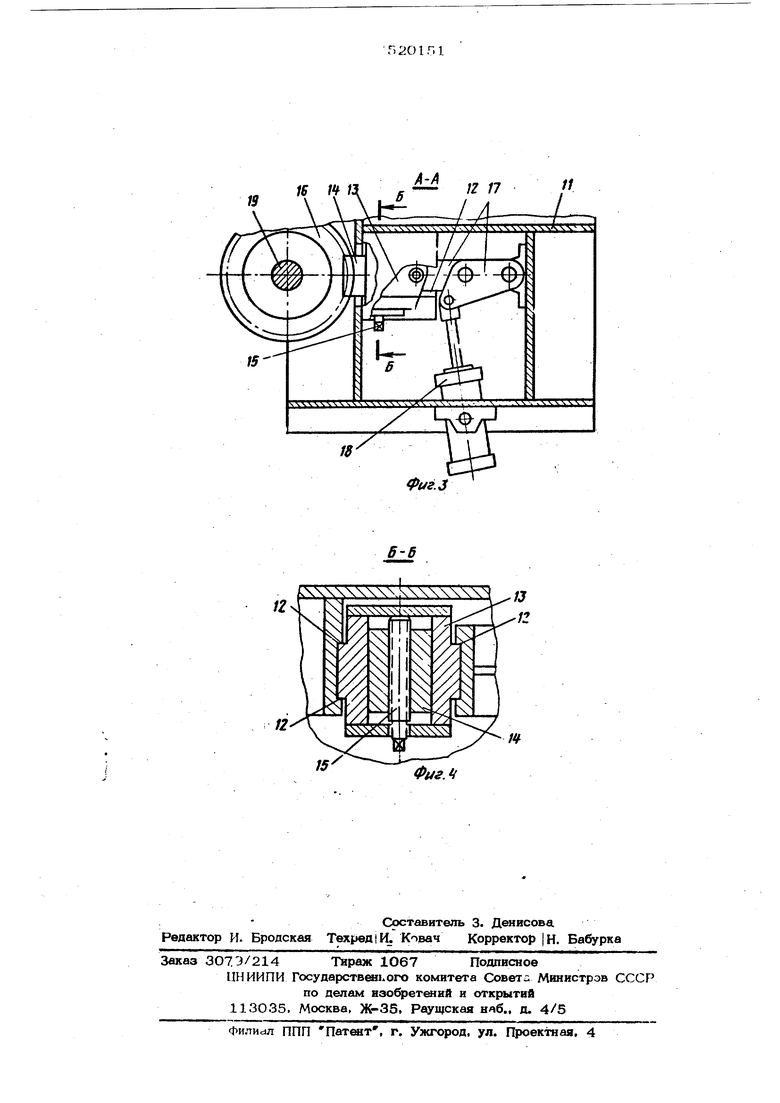
На фиг. 1 показан прештагаемый станок для габкк змеевиков, вид спереди; на фИ, JJ|то же, вид CBepxyt на фиг. .3 - разрез по IA-A на фиг. 1; на фиг. 4 - разрез по Б-Б на фиг. 3.
J Станок для гибки змеевиков включает в себя станину 1 с взаимно перпендикуляр ,ными направлякяиим 2 я 3. иа которых подвижно устаноалекм каретки 4. 5 я в снабженные гибочнымк шаблонами 7. Вз имно пертвядякулярное перемещение кар. при гибке обеспечивается гидропилия. драмн 3 и 9, а синхронизация их движения двуплечим реечным механизмом 10.
В корпусе 11 каждой каретки выполн 1иы направляющие 12с подвижно устгшовлеегаым в них ползуном 13, в его пазу поз вижно смонтирошш реечный упор 14 переметающийся с помсипью винта 15 в плоскостк шестерни 16, с которой взаимодействует посредством колено рычажного м 1хавиэмв П, шарннрио соединенного со ШТОКОМ пвввмошшяядра 18, ползуном 13 и корпусом 11, содержащим ось 19, на кот(рок свободно ycTatrobneHa шестерня 16 Описанный станок работает следующим образом. Трубная заголовка 20 устанавливается в ручьи гибочных шаблонов 7 кареток 4, 5, 6 и фиксируется в них. Включением гидроцилиндров 8 и 9 каретки перемещаются по направляющим 2 и 3i при этом труба изгибается вокруг шаблонов 7. В конце гибки труба расфиксируется. Включен ом гидроцил.шдров 8 и 9 на обратный ход каретки 4, 5 и 6 возвращаются в исходно положение, а труба перемещается в положа ние следующей гибки. Таким образом попу(чают ряд одинаковых по размерам гнутъ1х участков змеевика. При необходимостиизменения размеров гнутых участков в процессе гибки змеевиков переменной конфи1 рации включением пневмоцилиндра 18 перемешают ползун 13 с реечным упором 14 по направляющим 12 корпуса 11 каретки при помощи колено-ры чажного механизма 17 вправо. Шестерня 16i свободно сидящая на оси 19. рйсфиксируется относительно корпуса 11.. Включзнием гидроцилиндров 9 каретки 4 и 6 устанавливаются в любое положение на направляющих 2. в зависимости от задан1НЫХ размеров изгибаемого змеевика. При этом шестерня 16, свободно поворачиваясь вокруг оси 19, обкатывается по рей7 г /ff 1 5 3 2 Ю .111 и/ I
м двуплечего шарнирно-рычажного механизма 10. После установки кареток в заданное положение включают гидроцилиндры 9. Винтом 15 производят точную настройку реечного упора 14 относительно шестерни 16. Пневмошшиндром 18 перемещают ползун 13с реечным упором 14. фиксируя шестерню 16 относительно корпуса 11. После этого станок полностью пoдгoтo лeн к последующей гйбке. форму л а изобретения 1. Станок для гибки змеевиков по авт. св. № 507386, отличающийся тем, что, с целью расширения его технологических возможностей, каждая каретка снабжена устройством для ее настройки на заданный шаг гиба, содержащим подвижный относительно корпуса каретки ползун с установленным на нем реечным упором для фиксации шестерни, приводимый в действие силовым цилиндром, расположенным на каретке, и щарнирно соединенный с кареткой и штоком цилиндра при помощи копеио-рычажного механизма. 2. Станок по п. 1, отличающийс я тем, что, с целью повьпиения точности настройки на любой размер при гибке, |реечный упор выполнен подвижным относительно ползуна в плоскости шестерни при помощи, например, винтового механизма. 7
13
18
12
12
Фиг.
Ш
Фиг.{
