захватах. Схемы упр-авле1шя нижней ларой захватив авалогнгчьгы)
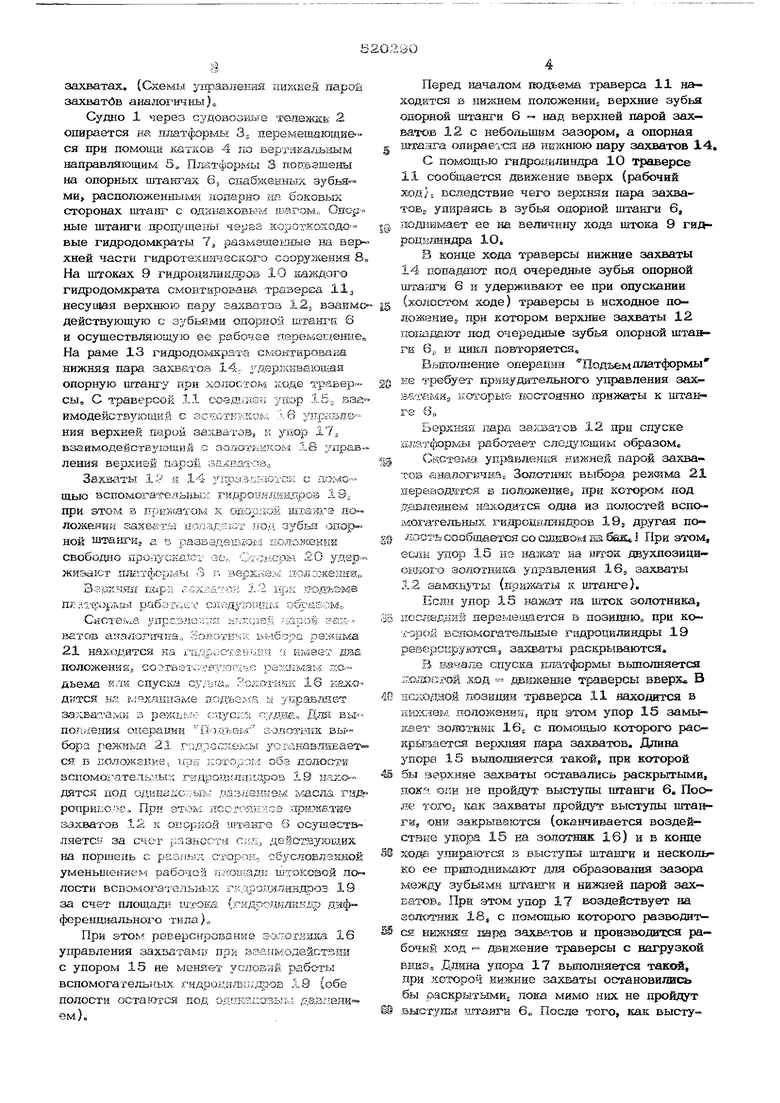
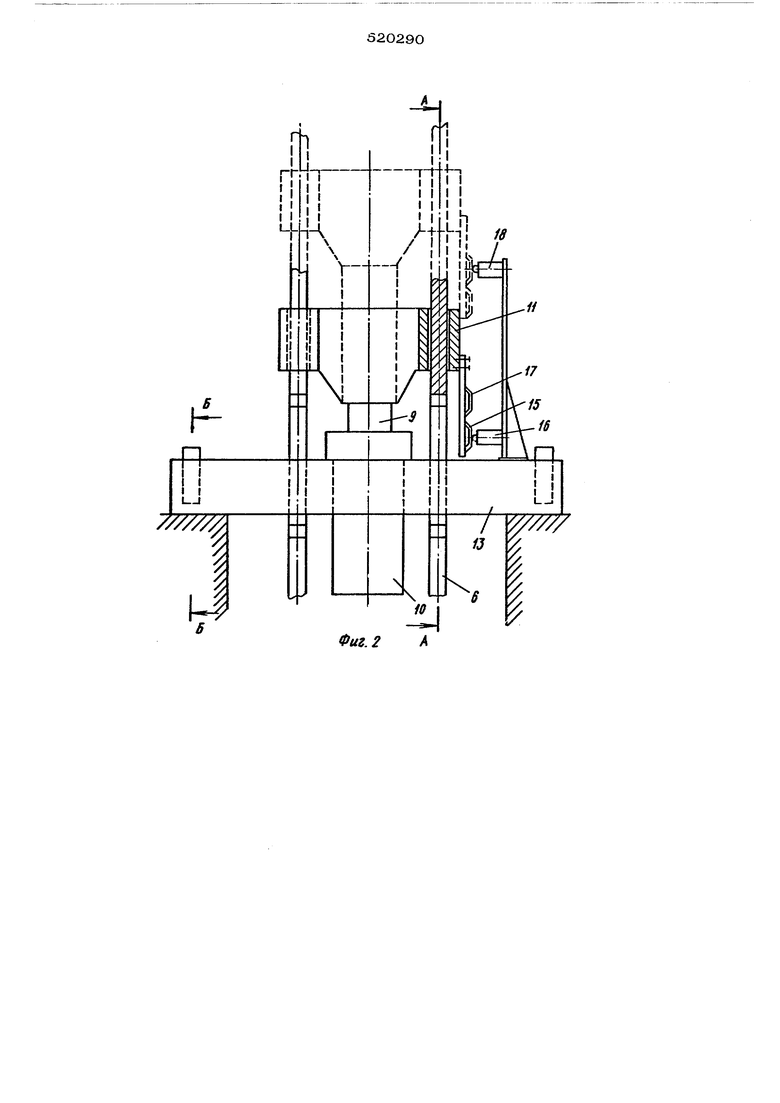
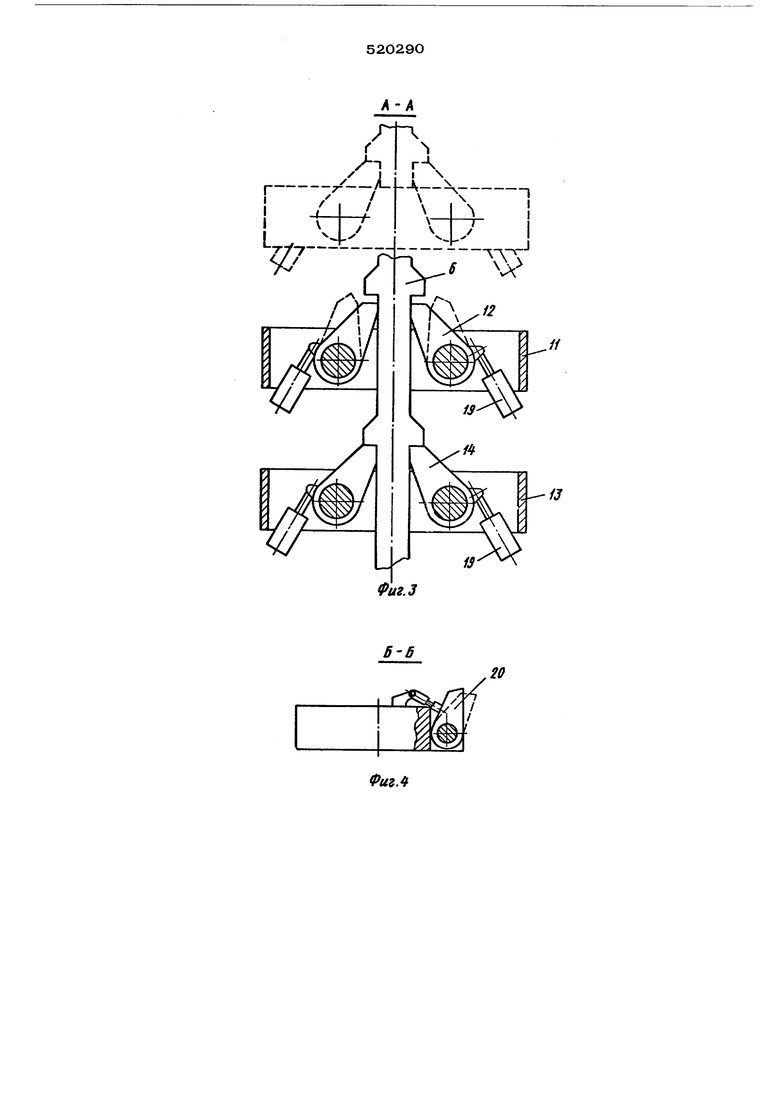
Судно 1 через судовозгхые -гепажжь: 2 опирается на платформы 3., пере ющающие- ся при помощи катков 4 по вертмкает:з;жым направляющим 5.„ Платформы 3 поргбашень на опорных штангах 6 снабженных зубья™ ми, расположенными попарно нн боковык сторонах штанг с одиыаховкм шагом,, Опор™ ные штанги прощгщех-гы через короткоходо - вые гидродомкраты 7, размещенные ша верхней части гидрот-ехнгиеского сооружения 8 На штоках 9 гвкрш&линщзоа 10 1-ьа эдог« ги/фодомкрата смонткрована траверса Ид несущая верхнюю пару захватов i2f взаимо действующую с зубьями опорном шташгн 6 и осуществляющую ее рабочее перемещение На раме 13 гидродоглкрата смоятаро.вайа нижняя пара захватов 14-„ удергхкваюилйя опорную щтангу при хопостсм зг.оде траЕер- сы, с траверсой 11 схЗедтшел упор 1. взаимодействующий с зс10ткккоь:; у1тр;:щл ния верхней парой залватов; к унор 17s взаим-одейстЕуюкий с ЗОЛОТЕЕКОМ IS /правления верхней парой за:,-;Еатс э,,
Захва ъ 1,й я 14 у:ггр злнются с псмо™ щью вспомогателы1ых гидродилЕНДроз 19; при этом в прЕХОтом к шор;1ой штангэ положении захЕ-еты попади к;т под зубья опор ной штанги, а Б развадеаюм Еюложенкн
свободно прозускаюг ее, С Юлжрк 20 удер живают ялсгтаюрмь. 3 г, BepSi-;e::v: ноло;кенаи,
Варкняя iiiipa г-йхза ок 12 хшк 3ЭД1,эме nj;гИсрормь рабаГ1:.е ,о следуюип;,:;: обкдазсМ;.
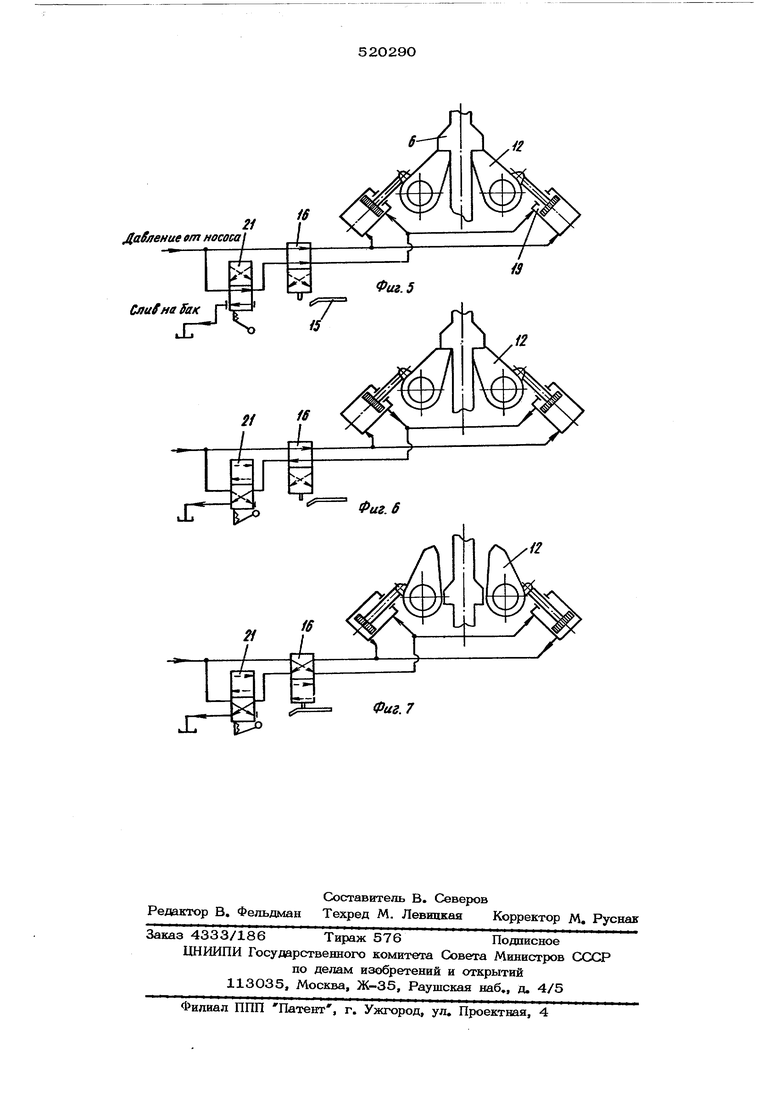
CHCTeiv a упрсзлеч;;т;1 Hi.;x;iSK ватов аналогична,, ЗОЛОТЕКК выбора режима 21 нахвШйтся на i-ii.apCCiasxi.Eia -s ка& положений:,, соответслсругощ е рехшма ,;; я& дьема йЛ55 спуска су/ищ,, Йскатник 16 ншсодится ка глеханизме подъел а д управлггет зал:ва :амк з ре5кьг-.1в c;nycj:;:a г;/ямй„ Длгс вь1- поляения оиераиии Я дДъeм золоТ(;Шк выбора режима ,21 гиюссл ыы усвйнавлавается в положение, црк iroTOp-otj оба полоста вспомо1 ате,пьных гвдроцггпигшров 19 aazo-дятся под o/iHHascivvbiiv; рдзленке, ь/гасла ги; ропрйьо в„ При этом пестояЕнсэ лрижзтае за сваТЭв 12 к опорной штанге 6 осуш:эст-в- ляетсу за счет |;:;азнссга скл действующих на поршень с раз|,шк;: сторон, обусловланной yMeHbUies-raej-i рабочей гт,,.ади штоковой по™ лости всиомо1ательны5 : ;{к,ародилиндров 19 за счет площади Штока, (гкдр-оДЕЛикдр дифференциального тила)„
При 3TOfv, реБврС р,ОБание зо,Г7.огвя1 а 16 управления захватам; при взацмодейстрлгл с упором 15 не меняет услозай вспомогательных гидродиляидроЕ 19 (обе
полости остаются под oiHjtacajsbiui ijasfsHK
ем;„
Перед Ешчалом гюдьема траверса 11 находктся в нижнем положенкИг верхние зубья опорной штанги 6 - над верхней парой зах- BaittB 12 с небо/шшим зазором, а опорная штаага опиравл-ся 1Ш нижнюю нару захватов 14
С помощью гйдродилинлра 10 траверсе
11сообщается движение вверх (рабочий Ж1ц} вследствие чего верхняя пара захваTOBj удираясь в зубьй опорной штанги 6, под110мает ее на величину хода штока 9 гидроцилиндра Ю,
В конце хода траверсы нижние захваты 14 попадают поя очереддые зубья опорной 6 и удерживают ее при опускании (холостом ходе) траверсы в исходное положэние,. при котором верхние захваты 12 по1шдают под очередные зубья опорной штаа- ГЕ 6с и цикл повторнетсЯе
Вьшолкение операдии Подьемялатформы ке требует принудительного управления зах,isaT iivsas :1,-опгорые гюстоянно нрнжаты к штацге о„
EiepxHSH гшра загааатов 12 при спуске :ймга.1.формы работает следующим образом
(.йстема укравленьш нижней парой захватов аналогична Золотник выбора режима 21 переаодгггся в положение при котором под деш шнием ишюдатся одна из полостей всио- ьсогательных ги.цроцалнндров 19 другая по.йость еообщаег-ся со СШЕШОЫ аза fes i При этом еспк упор 15 нэ нажат sia иггок двухпозици«знкого золотника управления ISj захваты
123ai iEKHyibi (ггркжаты к штанге),
Если упор 15 нажат на шток золотника, яос. деремечдается в позицию„ при ко- вспомогательные пщроцЕЛИддры 19 ревггрснруютсн, захваты- раскрываются,
В начале спуска платформы вьшолняется ,т:.о ;аэг:дой ход даиженке траверсы вверзи В нсжшзой ПОЗИЦИЙ траверса 11 находится а в;11гх;зем положений; при этом упор 16 замы- jcaeT ЗОЛОТНИК 16,; с помощью которого рас крьвэается верхтшя пара захватов. Длина упора 15 вьшолняется такой, при которой бы верхние захваты ост шались раскрытыми, яокг; они не пройдут выступы штанги 6. После IorOs как захваты пройдат выступы штавгиа они закрываются (оканчивается воздай- с1-вне уЕора 15 ка зол.отник 16) ив конце xofte упираютсу в выступы штанги и несколько ее приподни1 гают для образовашй зазора между зубьймй штакгЕ и нажзюй парой зах ватово При этом упор 17 воздействует на золС тник 18, с помощью ксуторюхю разводится нижнян нэра захватов и производится рабочий ход ™ движение траверсы с нагрузкой
BEKEu Длина упора 17 выполняется такой, дри xoTOpoii нижние захваты остановилиса бы раскрытымиг пок мимо них не пройдут высгушз штанга 6 После того, как выступы штанги пройдут нижние захваты, они за- крьгааются (фекрашается действие упора 17 на золотник 18). В конце рабочего хода (дэижения траверсы вниз) штанга 6 сво ими высттупами упирается в нижние захвать и цикл повторяется. Перед подъемом судна на платформы 3 устанавливают судовозные тележки 2 с кил блоками и спускают платформу, после чего судно заводт в судоподъемник поднимают платформу с судном. В верхнем положении платформы фиксируются стопорами 20, и судно перекатывают на берег. Спуск судна производят в обратном порядке. Формула изобретения Вертикальный судоподъемник, содержащий короткоходовые гищюдомкраты, приводящие в движение платформы с помощью зуб чатых штанг, с шагом зубьев, меньшим хода гищюдомкратов, и имеющие управляемые вспомогательными г дроципиндрами захва-
,в
Фиг.1 ты, на которые своими зубьями опираются штанги, причем каждая верхняя пара захватов закреплена на траверсе гифодомкрата и осуществляет перемещение штанги, а каз дан нижняя пара захватов укреплена на раме ги/фодомкрата и удерживает опорную штангу при холостом ходе траверсы, при этом вспомогательные гидропилиндры сна&жены трубопроводами, отличающибс я тем, что, с целью упрощения управления захватами и повьппениы надежности работы судоподъемника, на трубопроводах каждой пары вспомогательных ги юцилиндров установлен двухпозицнонный реверсивный зопспгявх выбора режима подъема-спуска, причем между каждым золотником выбора режима и каждой парой вспомогательных гидроцнлишфов в трубопроводы вмонтирован двухпозиционный реверсивный золотник управления, а на траверсе закреплены упоры, один из которых взаимодейспгует с золотником управления верхней парой захватов, а ругой - с золотником управления нижней оарой захватов.
--7б

| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный судоподъемник | 1988 |
|
SU1558769A1 |
| Вертикальный судоподъемник | 1972 |
|
SU506687A1 |
| Подъемный механизм вертикального судоподъемника | 1988 |
|
SU1523471A1 |
| Подъемник для подачи блоков судов в сухой док | 1979 |
|
SU775220A1 |
| ПОДЪЕМНЫЙ МЕХАНИЗМ ДЛЯ ВЕРТИКАЛЬНОГО СУДОПОДЪЕМНИКА | 1973 |
|
SU403810A1 |
| Подъемный механизм вертикального судоподъемника | 1977 |
|
SU679478A1 |
| Наклонный транспортный судоподъемник | 1983 |
|
SU1122783A1 |
| Подъемный механизм вертикального судоподъемника | 1979 |
|
SU872636A1 |
| Вертикальный судоподъемник | 1979 |
|
SU783119A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
Ла8ление em нососа
j;
//
