(54) ПРИВОД ЗАХВАТА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Привод захвата манипулятора | 1979 |
|
SU874333A2 |
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Привод захвата манипулятора | 1976 |
|
SU607730A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Привод схвата манипулятора | 1977 |
|
SU672013A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| Манипулятор | 1974 |
|
SU503710A1 |
Изобретение относится к машиностроению, в частности, к конструкциям манипуляторов.
Известен привод захвата манипулятора через суставы с двумя поперечными осями, содержащие установленные на упомянутых осях блоки цилиндрических и конических колес 1.
Недостатками этого привода являются конструктивная сложность и низкий коэффициент полезного действия.
Известен также привод захвата манипулятора через суставы с двумя поперечными ОСЯМИ, содержащий стержни, смонтированные с возможностью поступательного перемещения ВхТ;оль продольных осей, соединяемых суставами звеньев 2.
Недостатками этого привода также являются конструктивная сложность и низкий коэффициент полезного действия.
Цель изобретения - упрощение конструкции привода И повыщение коэффициента полезного действия.
Это достигается за счет того, что центральные стержни снабжены закрепленными консольно на их концах рейками, взаимодействующими с установленными на поперечных осях И находящимися в зацеплении между собой цилиндрическими зубчатыми колесами с одинаковы.м числом зубьев.
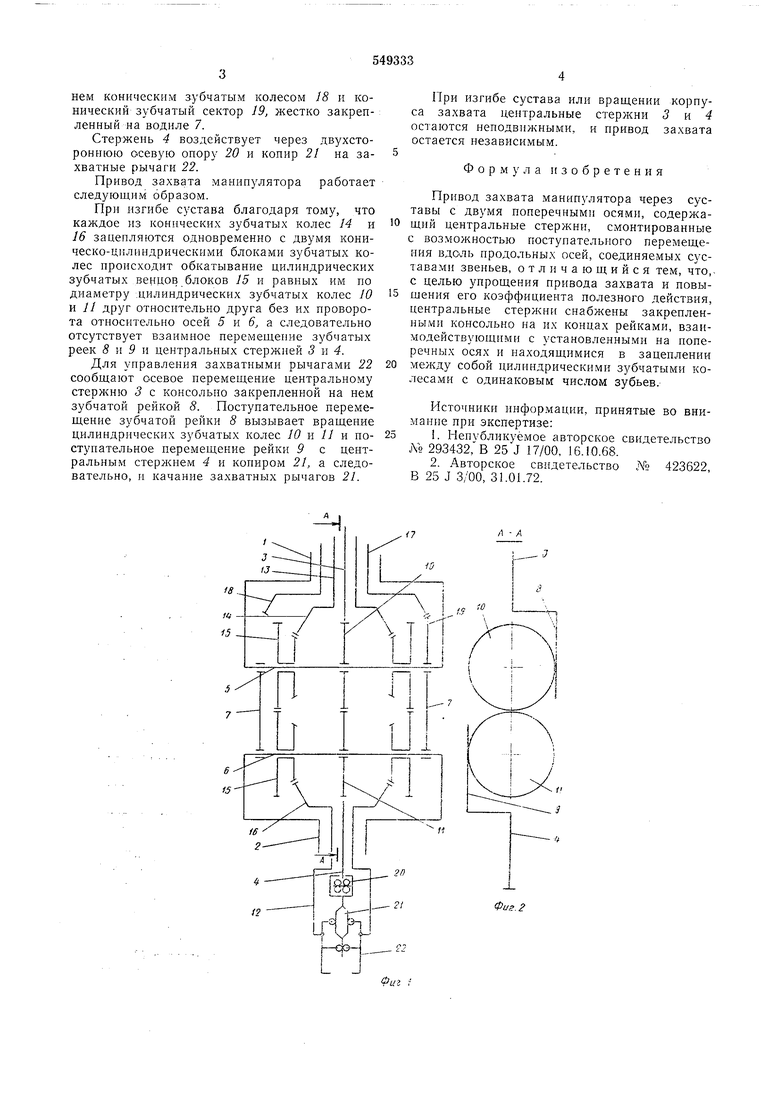
На фиг. 1 изображена принципиальная кинематическая схема привода; на фиг. 2 - сечение Л-Л фиг. 1.
Нривод захвата манииулятора содержит локтевое звено У, кистевое звено 2, центральный стержень 3, установленный с возможностью возвратно-ностуиательного перемещения вдоль ОСИ звена /, центральный стержень 4, аналогично установленный в звене 2. Звенья
/ И 2 шариирно соединены поперечными осями 5 И 6 с помощью водила 7. На концах центральных стержней 3 н 4 консольно закреплены соответственно зубчатые рейки 8 И 9, взаимодействующие с находящимися в
зацепленин между собой цилиндрическими зубчатыми колесами JO и //, смонтированными на ионеречных осях 5 и 6.
Зубчатые рейки 8 м 9 зацепляются со сцепленными между собой цилиндрическими
зубчатыми колесами 10 и 1, смонтированными на поперечных осях 5 и 6.
Цепь вращения корпуса захвата У2 содержит приводной вал 13 с жестко закрепленным на нем коническим зубчатым колесом
М, блоки цилиидрических и конических зубчатых колес 15, свободно сидящие на осях 5 н 6, коническое зубчатое колесо 16, жестко соединенное с корпусом захвата 12.
Цень изгиба кистевого сустава содержит
приводной вал 17 с жестко закрепленным на
