(54) ШИБЕРНЫЙ ПИТАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| БИБЛИОТЕ.-.А•1.•s;*lW-~ | 1972 |
|
SU356012A1 |
| Установка для сушки и полимеризации штучных изделий | 1979 |
|
SU918744A1 |
| Загрузочно-разгрузочное устройство | 1984 |
|
SU1331631A1 |
| Устройство для поштучной подачи деталей при комплектовании их с базовыми деталями | 1973 |
|
SU485855A1 |
| Загрузочное устройство | 1985 |
|
SU1268367A1 |
| Устройство для подачи и сборки стержневыхдЕТАлЕй | 1980 |
|
SU827288A1 |
| Шиберный питатель | 1980 |
|
SU876366A1 |
| Устройство для подачи деталей | 1983 |
|
SU1152098A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ХАЛ ИЗ ПРЕДВАРИТЕЛЬНО ЗАКАТАННЫХ ТЕСТОВЫХ ЖГУТОВ | 1963 |
|
SU223714A1 |
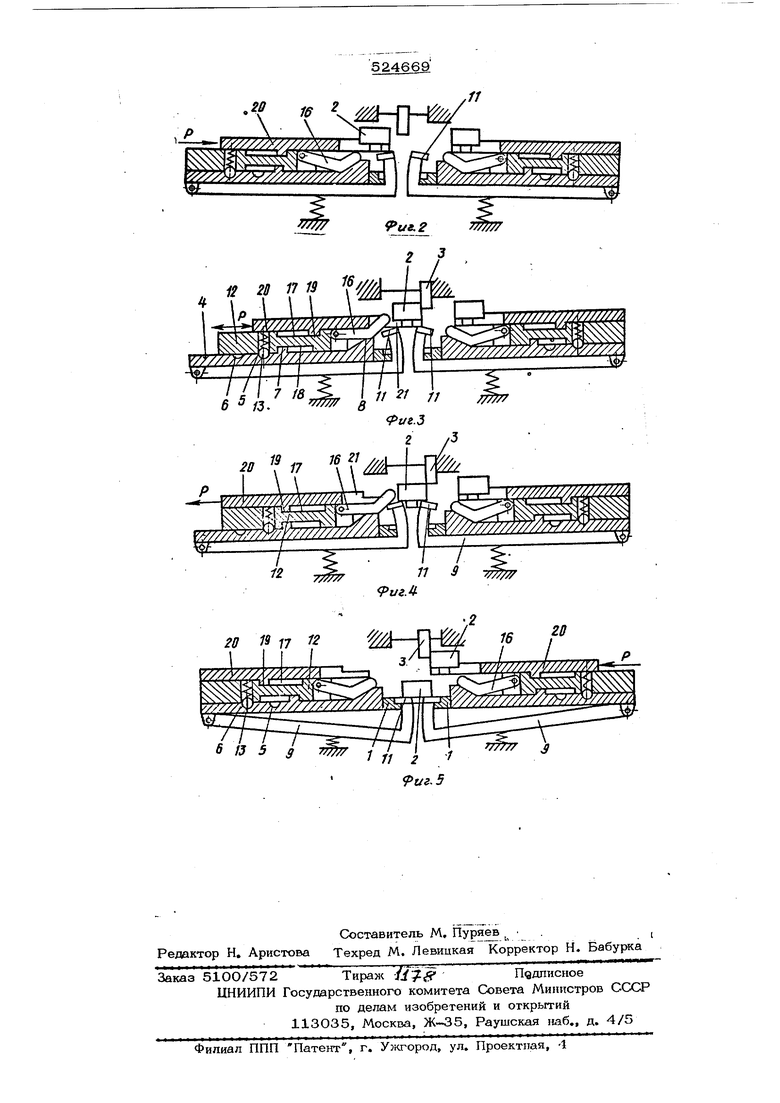
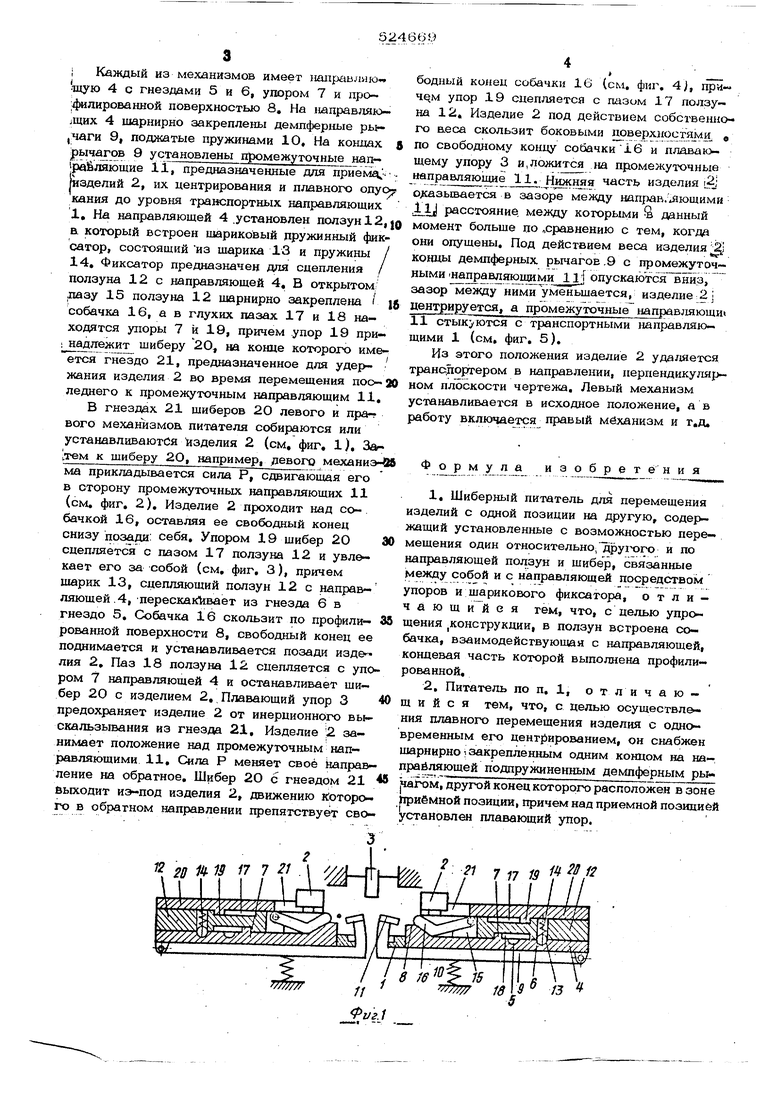
Изобретение относится к устройс;1 м, предназначенным для принудительного перемещения ориенгированных изделий к транс.портирующей системе технологической ли НИИ, и может быть использовано в машиностроении, в частности в станкостроении. Для перемещения деталей применяют питатели, в которых ползун, перемещающийся по направляющим, несет захватный орган. Движение ползуна ограничено шариковым фиксатором и упорами. Захватный с)рган выполнен в виде двух планок, связанных Me ifrду собой зубчатым колесом и рейками. Целью изобретения является упрощение конструкции питателя, плавное перемещение изделий на другую позицию и их центрирова ние. Указанная цель достигается тем, чтв в ползун встроена собачка, взаимодейству1О.щая с направляющей, концевая часть которой выполнена профилированной, Кроме того, питатель снабжен демпфернь1м рычагом, один конец которого располо- ;жен в зоне приемной позиции, причем над приемной позицией у;становлен{ плавающий упор. На фиг, 1 схематично показано исходное положение механизмов питателя, причем плавающий упор занимает произвольное положение; на фиг, 2 - начальная фаза движе-4 ния щибера левого механизма с изделием; на фиг, 3 - положение изделия над промежуточными направляющими; на фиг, 4 - выход шибера левого механизма из-под изделия и положение последнего на промежуточ- ных направляющих;, на фиг, 5 - исходное положение левого механизма, стыкование промежуточных направляющих с транспортнь1ми направляющими и начальная фаза движения шибера правого механизма с изделием, Питатель (см, фиг. 1) состоит из двух идентичных мех низмов, расположенных слева и справа от транспортных направляющих 1, позволяющих перемещать транспортером изделия 2 в направлении, перпендиеулярном длоскости чертежа. Общим для механизмов является плавающий упор 3, передвигаемый изделиями 2 по его направляющей. i Каждый из механизмов имеет ланргшляю- щую 4 с гнездами 5 и 6, упором 7 и про;4 илированной поверхностью 8, На направляю- jmax 4 шарнирно закреплены демпферные ры,чаги 9, поджатые пружинами 10, На кондах рычагов 9 установлены промежуточные нап |ра6ляющие 11, предназначенные для приемг, изделий 2, их центрирования и плавного опу кания до уровня транспортных направляющих 1, На направляющей 4 .установлен ползун 12, а который встроен шариковый пружинный фиксатор, состоящий-из щарика 13 и пружины / 14, Фиксатор предназначен для сцепления / ползуна 12 с направляющей 4, В открытом. ,пазу 15 ползуна 12 щарнирно закреплена собачка 16, а в глухих пазах 17 и 18 находятся упоры 7 и 19, причем .упор 19 принадлежит щиберу 20 на конце которого гнездо 21, предназначенное для удержания изделия 2 во время перемещения пооледнего к промежуточным направляющим 11, В гнездах 21 щиберов 2О левого и правого механизмов питателя собираются или устанавливаются 1изделия 2 (см, фиг, 1), Заг1тем к щиберу 2Q, например, девогр механиэма прикладывается сила Р, сдвигающая его в сторону промежуточных направляющих 11 (см, фиг, 2), Изделие 2 проходит над собачкой 16, оставляя ее свободный конец снизу позади: себя. Упором 19 щибер 20 сцепляется с пазом 17 ползуна 12 и увл&кает его за собой (см, фиг, 3), причем шарик 13, сцепляющий ползун 12 с направляющей,4, перескак11вает из гнезда 6 в гнездо 5, Собачка 16 скользит по профили- рованной поверхности 8, свободный конец ее поднимается и устанавливается позади изде ЛИЯ 2, Паз 18 ползуна 12 сцепляется с упором 7 направляющей 4 и останавливает щибер 20 с изделием 2, Плавающий упор 3 предохраняет изделие 2 от инерционного выскальзывания из гнезда 21, Изделие :2 занимает положение над промежуточным направляющими 11, Сила Р меняет своё йаправ- ление на обратное. Шибер 20 с гнездом 21 выходит изделия 2, движению Которого в обратном направлении препятствует
2И П 13 17 7
II-I
Z) tОГ/Г С
7 17 13 1 /
/
S Г бодный конец собачки 16 (см, фиг, 4), при 4QM упор 19 сцепляется с пазом 17 ползуна 12, Изделие 2 под действием собсгвенного аеса скользит боковыми прверх1 ост4ши « по свободному концу собачки Ж6 и плавающему упору 3 и,ложится на промежуточные направляющие 11. Нижняя часть изделия одазьшается в зазорё между надрав.лющимн расстояние, между которыми и данный момент больще по ,сравнению с тем, когда они опущены. Под действием веса изделия;) концы демпферных рычагов ,9 с промежуточными направляющими 1Д1 опускаются вниз, зазор между ним)и уменьшается, изделие 2 j центрируется, а промежуточные направляющи ц стьпс -ются с транспортными направляю- щими 1 (см, фиг, 5), Из этого положения изделие 2 удаляется трансдоргером в направлении, перпендикулярном плоскости чертежа. Левый механизм устанавливается в исходное положение, а в работу включается правый механизм и т.д, Формула изобретения , Шиберный пи-латель для перемещения изделий с одной позиции на другую, содержащий установленные с возможностью пере- мещения один относительно,дру1х го и по направляющей ползун и щибер, связанные между собой и с направляющей посредством упоров и щарикового фиксатора, отличающийся тем, что, с целью упрощения конструкции, в ползун встроена собачка, взаимодействующая с направляющей, концевая часть которой выполнена профилированной, 2, Питатель по п, 1, отличающийся тем, что, с целью осуществления плавного перемещения изделия с одновременным его центрированием, он снабжен щарнирно 1 закрепленным одним концом на на- прайляющей подпружиненным демпферным рьь jqaroM, другой конец которого расположен в зоне )1риёмной позиции, причем над приемной позицией установлен плавающий упор.
.E
12
20 IS 77 f2
6 13 5
го
