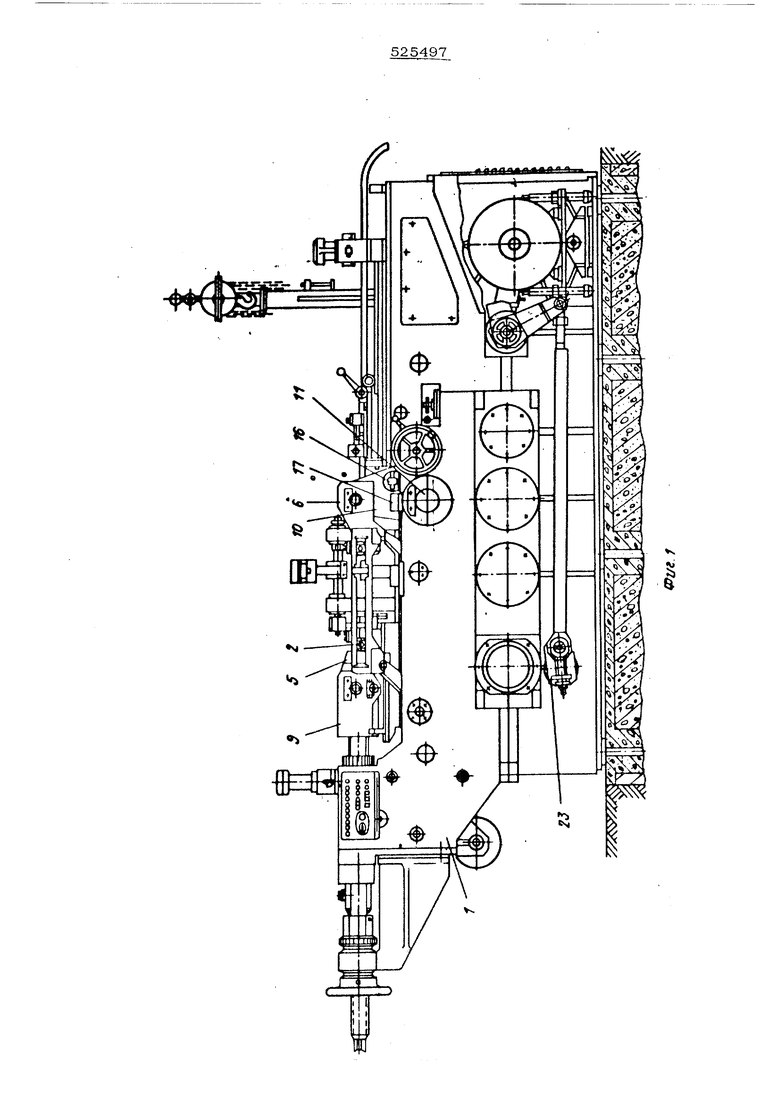
Изобретение относится к области кузнечно-прессового оборудования и прод11/1;) для калибровки грузовых, ВЫСОКОП ЮЧНЫХ, якорных и других видов цепей и испытания их пробной нагрузкой. Известен автомат для калиб юпки н испы тания цепей, содержащий расположенные на салазках, установленных на стани)1е и кцяе- матнчески связанных с валом приводного лектродвигателя, две поворотные каретки с закрепленными в них захватами цепей, установленные в направляющих станилы с возможностью } егулировочного перем шения пол зушки с проушилаМи в которых шарнирно установлена одна из п6во|ютных кареток, а также смонтированный на оси, закрепленной в станине, качаюишйся двуплечий рьмаг, на одном конце которого шарнярно установлена другая поворотная каретка, а другой конец связан кинематически с приводным электро- двигателем. -. Цель изобретения - повысить п юидводительность и обеспечить возможность регулирования хода каретки, шарнирно соедиионной с качпюпщмся двуплечим р1,1чагх)м. Это достигается тем, что предлагаемый автомат снабжен закрепленным на одном кон-. ,це качающегося двуплечего рычага, шарнирно. соединенного с поворотной кареткой, регулируемым упором, взаимодействующим с неподвижным упором, предусмотренным в станине, а также смонтированным на оси в станине w кинематически соединенным с приводным электгродвнгатепем поворотным кулачком, взаимодействующим с роликом, закрепленным в проушине на другом конце качакндегося двуплечего рычага. При этом в салазках; выполнены продольные пазы, а в каретках преду- смотрены поворотные сухари, входящие в пазы салазок. На фиг. 1 показан автомат, обший вид; на фиг. 2 - то же. Вид сзади, на фиг. 3 - кинематическая схема автомата. Автомат для калибровки и испытания цепей пробной загрузкой состоит из станины 1, на КОТО1ЮЙ установлены салазки 2, кинематически связанные с валом приводнотх) электродвигателя 3; муфты 4 с т-ормочЗом; поворот- Hi,tx кареток 5 и 6 с закролленкыми на них захватами истей 7 и 8. Одна из поворотных кареток 5 шарнирно установлена в ползуш- ке 9 с проушинами, которая имеет возможность регулировочного перемещения в направляющих станины 1. Другая поворотная каретка 6 шарнирно связана с чим плечом качающегося двуплечего рычага 10, смонтированного на оси 11, закрепленной в станине 1. Другое плечо рьиага связано через ролик 12, кулачок 13, шестеренный привод 14, клиноременную передачу 15 с приводным электродвигателем 3. Для обеспечения возможности регулирования хода каретки 6, на одном конце двуплечего рычага 10 закреплен регулируемый упор 16, который взаимодействует с неподвижным упором 17, предусмотренным в ста нине 1. В салазках 2 вьшолнены продольные пазы, а в каретках 5 и 6 предусмотрены по- воротные сухари 18, входящие в пазы салазок 2. Кроме того, на станине установлены механизм клеймения 19, механизмы фиксации цепи передний 20 и задний 21, механизм подачи 22 к привод подачи 23. Для работы таких узлов автомата, как механизмы фиксации цепи, механизм клеймения цепи 19, а также для остановки карет ки 6 в исходном левом положении при отключении автомата предусмотрен командоаппарат, дающий команду на включение и отключение воздухораспределителей рабочих механизмов. Каждый автомат снабжен прибо ром для замера и непрерывной записи усилий калибровки. Автомат работает следующим образом. От двухскоростного приводного электродвигателя 3 при помощи клиноременной пере дачи 15 вращение передается через фрикционную муфту 4 и щестеренный привод 14 кулачковому валу, а следовательно, и кулачку 13. От последнего приводится в качатель ное движение двуплечий рычаг 10 (опускание большого плеча рычага, а следовательно возвращение каретки в левое положение осуществляется за счет веса рычага и установленной пружины). Каретка 6, шарнирно связанная с верхним концом рычага 1О, совершает возвратно-поступательное движение. Величина хода карет ки 6 может изменяться благодаря наличию регулируемого упора 16, установленного на плече рычага 1О и контактирующего с непод вижным упором 17, расположенным на стани не 1. Изменение величины хода каретки 6 позволяет производить калибровку коротких участков цепи (три звена), при этом точность (качество) калибровки звеньев по щаГУ получается вьш1е, чем при калибровке отрезка цепи, состошдего из большего числа звеньев (5,7,9 звеньев). Изменение числа ходов каретки 6 достигается путем переключения скорости вращения приводного электродвигателя 3 с пульта управления и переключения скорости вращения шестерен. Перед началом работы машины цепь подается в автомат. Участок цепи, подвергаемый калибровке, берется захватами 7 и 8, закрепленными в каретках 5 и 6. Каретка 5 в момент растяжения цепи стоит неподвижно, а каретка 6 перемещается под действием рычага 10, таким образом происходит растяжение - калибровка или испытание цепи пробной нагрузкой. Для испытания цепи пробной нагрузкой в автомате предусмотрен прибор, записьшаю- щий и показывающий усилия, возникающие в процессе растяжения цепи. Для получения заданного размера участка цепи каретка 5 устанавливается в нужное положение с помощью винтов, приводи- ьсых во вращение маховиком. Управление каретками 5 и 6 (верхнее и нижнее положение их) осуществляется салазками 2. По окончании растяжения каретки опускаются вместе с салазками, в этот момент рьиаг механизма клеймения 19 с керном опускается от пневмоцилиндра и клеймит цепь. После клеймения цепь перемещается на определенную длину посредством каретки механизма подачи 22, после чего происходит калибровка или испытание следующего участка цепи. Формула изобретения Автомат для калибровки и испытания цепей, содержащий расположенные на салазках, установленных на станине и кинематически связанных с валом приводного электродвигателя, две поворотные каретки с закрепленными в них захватами цепей, установленные в направляющих станины с возможностью регулировочного перемещения ползушки с проушинами, в которых шарнирно установлена одна из поворотных кареток, а также смонтированный на оси, закрепленной в станине, качающийся двуплечий рычаг, на одном конце которого щарнирно установлена другая поворотная каретка, а другой конец связан кинематически с приводным электродвигателем, отличающийся тем, что, с целью повьшдения производительности и обеспечения
56
возможности регулирования хода каретки,приводным электродвигателем поворотным
соединенной с двуплечим рычагом, онснаб-кулачком, взаимодействующим с роликом,
жен закрепленным на одном конце рычагазакрепленным на другом конце качающегорегулируемым упором, взаимодействующимся двуплечего рычага, при этом в упомянус неподвижным упором и установленным в5 ых салазках вьшолнены продольные пазы,
станине, а также смонтированным на осиа в каретках установлены поворотные сухав станине и кинематически соединенным сри, входящие в пазы салазок.
525497
NI 
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для калибровки и испытания цепей | 1987 |
|
SU1416233A1 |
| Автомат для калибровки и испытания цепи | 1977 |
|
SU732067A1 |
| Автомат для калибровки и испытания цепей | 1985 |
|
SU1269913A1 |
| Станок для ремонта шпал | 1960 |
|
SU139337A1 |
| ЗУБОШЕВИНГОВАЛЬНЫЙ СТАНОК | 1969 |
|
SU254314A1 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| Полуавтомат для заточки многолезвийного инструмента с прямыми и винтовыми стружечными канавками | 1968 |
|
SU300047A1 |
| Станок для растяжки сотового заполнителя | 1986 |
|
SU1433601A1 |
| Автомат для предмонтажной обработки электрических шнуров | 1988 |
|
SU1642542A1 |
| Автомат для гибки проволоки | 1989 |
|
SU1664444A1 |