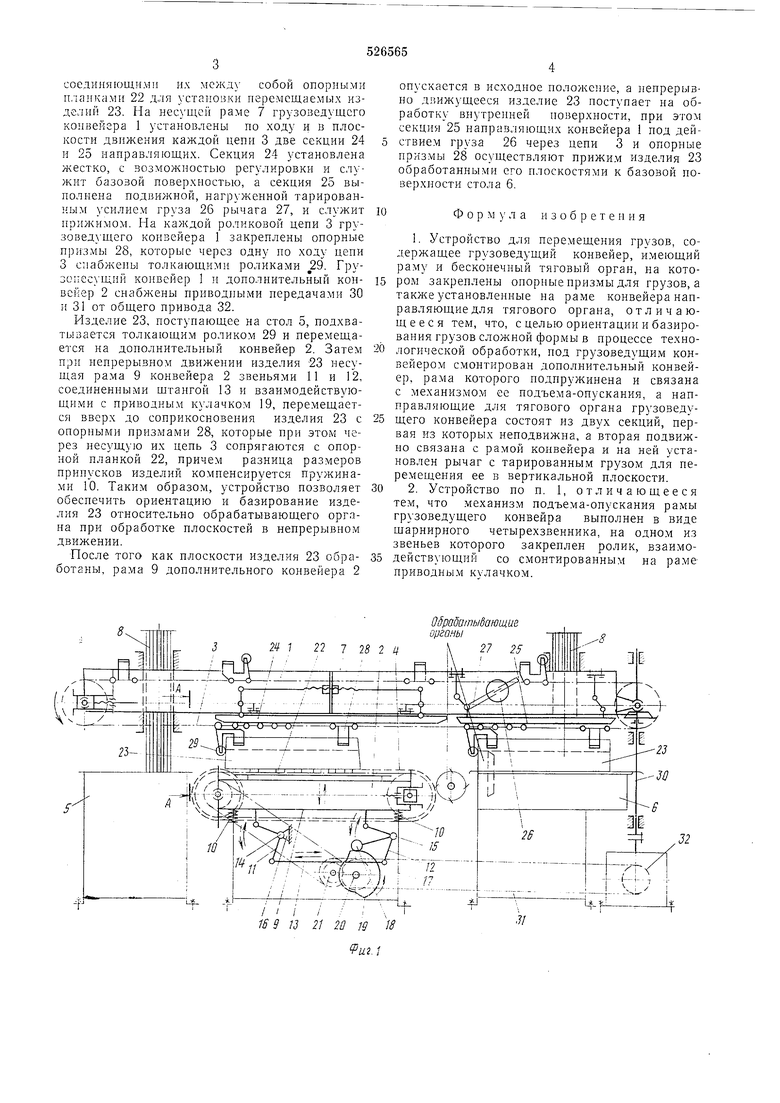
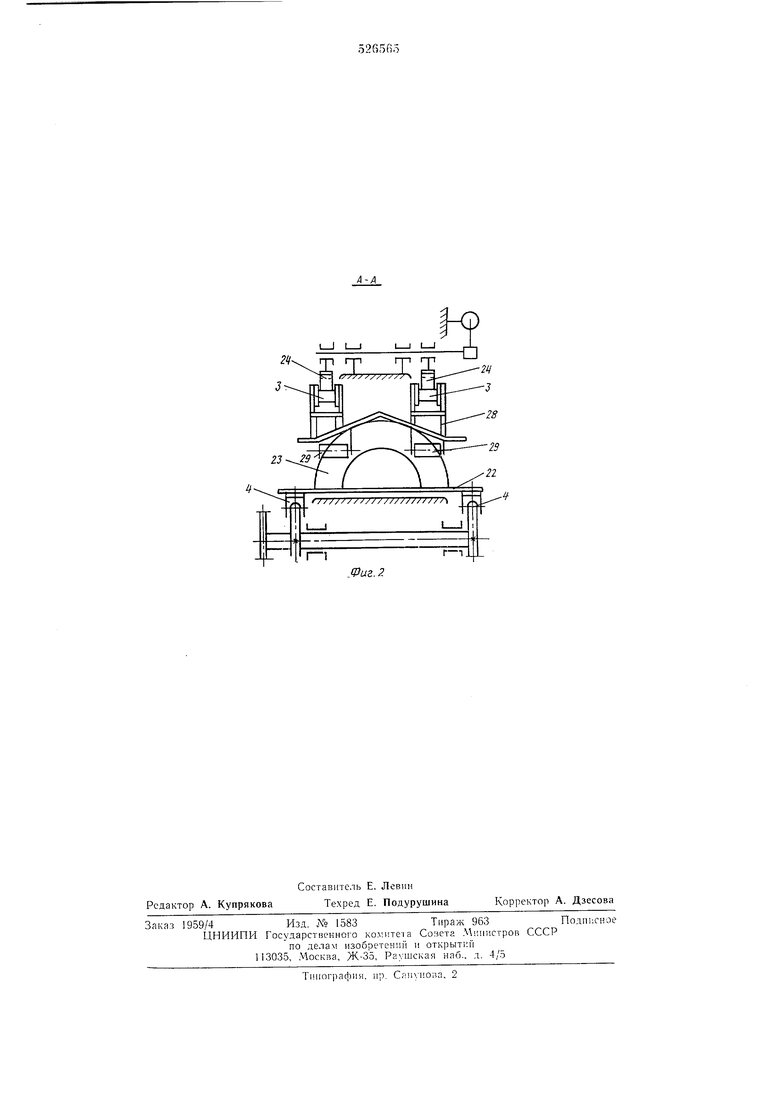
соединяющиАИ их мсжд} собой опорными планками 22 для устаионки перемещаемых изделий 23. На несуи;ей раме 7 грузоведущего конвейера 1 установлены по ходу и в плоскости движения каждой цепи 3 две секции 24 и 25 направляющих. Секция 24 установлена жестко, с возможностью регулировки и служит базовой поверхностью, а секция 25 выполнена подвижной, нагруженной тарирован(ым усилием груза 26 рычага 27, и служит прижимом. На каждой роликовой цепи 3 грузовед}-щего конвейера 1 закреплены опорные призмы 28, которые через одну по ходу цепи 3 спабжены толкающими роликами 29. Грузопесущий конвейер 1 и дополнительный конвейер 2 снабжены приводными передачами 30 и 31 от общего привода 32.
Изделие 23, поступающее на стол 5, подхватывается толкающим роликом 29 и перемещается на дополнительный конвейер 2. Затем при непрерывном движении изделия 23 несущая рама 9 конвейера 2 звеньями 11 и 12, соединенными щтангой 13 и взаимодействующими с приводным кхЛачком 19, перемещается вверх до соприкосновения изделия 23 с опорными призмами 28, которые при этом через несущую их цепь 3 сопрягаются с опорной планкой 22, причем разница размеров припусков изделий компенсируется пружинами 10. Таким образом, устройство позволяет обеспечить ориентацию и базирование изделия 23 относительно обрабатываюпдего органа при обработке плоскостей в непрерывном движении.
После того как плоскости изделия 23 обработаны, рама 9 дополнительного конвейера 2
опускается в исходное положение, а непрерывно движущееся изделие 23 поступает на обработку внутренней поверхности, при этом секция 25 направляющих конвейера 1 под действием груза 26 через цепи 3 и опорные нризмы 28 осуществляют прижим изделия 23 обработанными его плоскостями к базовой поверхности стола 6.
Фор м у л а и 3 о б р е т е и и я
1. Устройство для перемещения грузов, содержащее грузоведущий конвейер, имеющий раму и бесконечный тяговый орган, на котором закреплены опорные призмы для грузов, а установленные на раме конвейера направляющие для тягового органа, отличающееся тем, что, е целью ориентации и базирования грузов сложной формы в процессе технологической обработки, под грузоведущим конвейером смонтирован дополнительный конвейер, рама которого подпружинена и связана с механизмом ее подъема-опускания, а напправляющие для тягового органа грузоведущего конвейера состоят из двух секций, первая из которых неподвижна, а вторая подвижно связана с рамой конвейера и на ней установлен рычаг с тарированным грузом для перемещения ее в вертикальной плоскости.
2. Устройство по п. 1, о т л и ч а FO щ е е с я тем, что механизм подъема-опускания рамы грузоведущего конвейра выполнен в виде щарнирного четырехзвенника, на одном из звеньев которого закреплен ролик, взаимодействующий со смонтированным на раме приводным кулачком.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоведущий конвейер | 1990 |
|
SU1792895A1 |
| Шаговый конвейер для транспортирования штучных грузов | 1976 |
|
SU607759A1 |
| Устройство для передачи колесных транспортных средств | 1988 |
|
SU1546385A1 |
| Линия транспортирования изделий | 1980 |
|
SU939366A1 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Съемно-загрузочное устройство Макарова А.П. | 1982 |
|
SU1115982A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Грузопассажирская транспортная установка фролова и.в. | 1986 |
|
SU1440837A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Устройство для пакетирования тарно-штучных грузов | 1977 |
|
SU686960A1 |
-,.„./ / // : i X i 1S S /J / 20 19 W Обрабатыбающив органы 27 25
