Изобретение касается автоматизации технологических процессов и может найти применение для подачи деталей к многопозиционным станкам, например роторным.
Известны устройства для загрузки деталей в многопозиционные роторные станки, содержащие цепной транспортер с захватами для деталей и связанный с ним кулачковый вал, воздействую1ций через рычаг на отсекатель.
Известные устройства не обеспечивают согласованной подачи деталей в рабочие позиции станка при неисправности одной или нескольких из этих позиций.
Цель изобретения обеспечение согласованной подачи деталей только на исправные рабочие позиции.
Для этого в предлагаемом устройстве кулачковый вал кинематически связан с приводом станка и снабжен расположенным в кинематической цепи диском, на котором закреплены выдвижные кулачки, число которых согласовано с числом позиций станка.
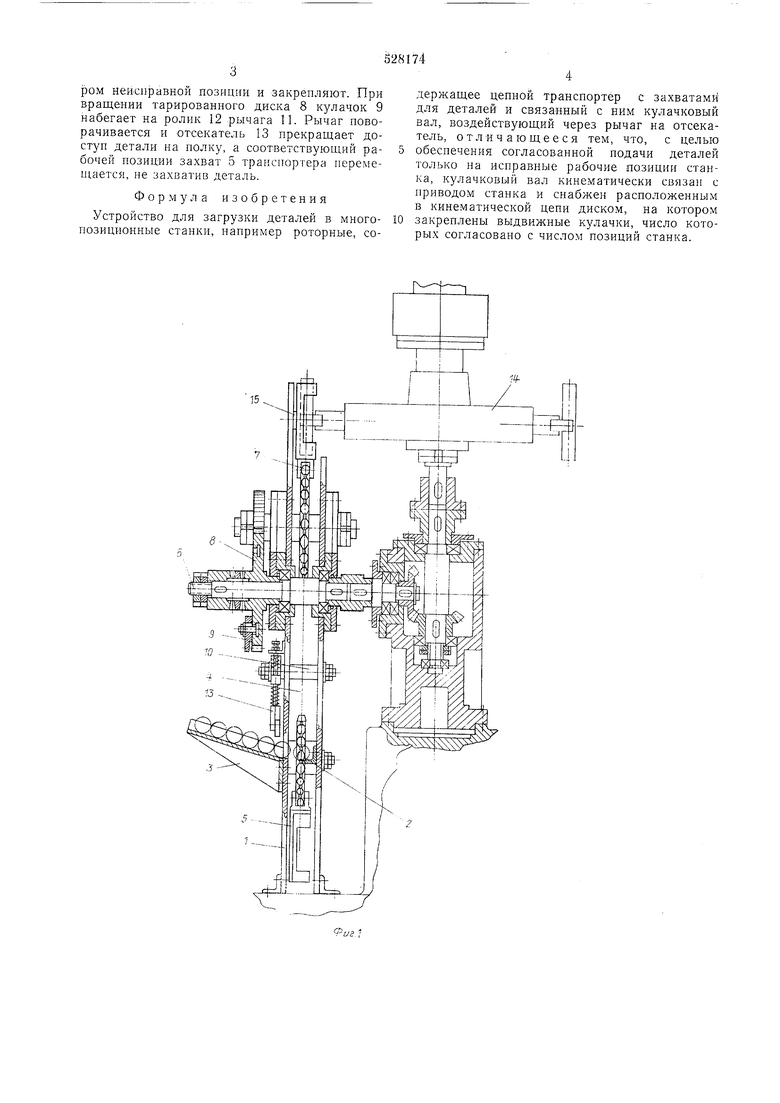
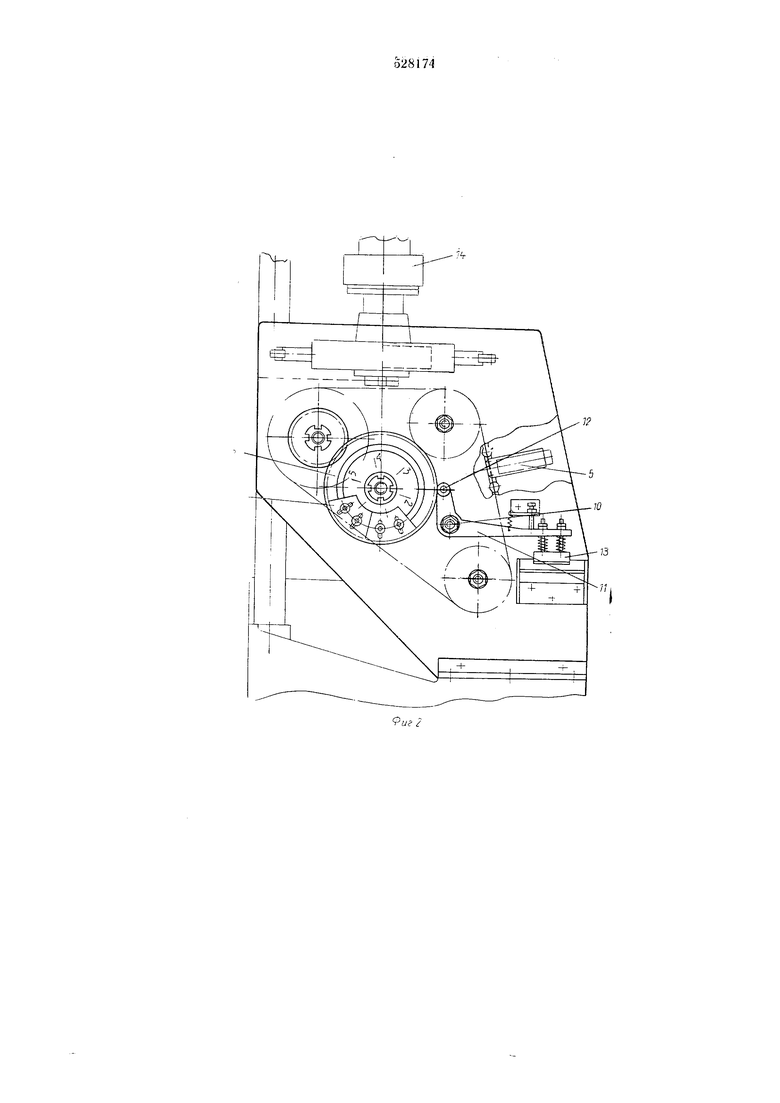
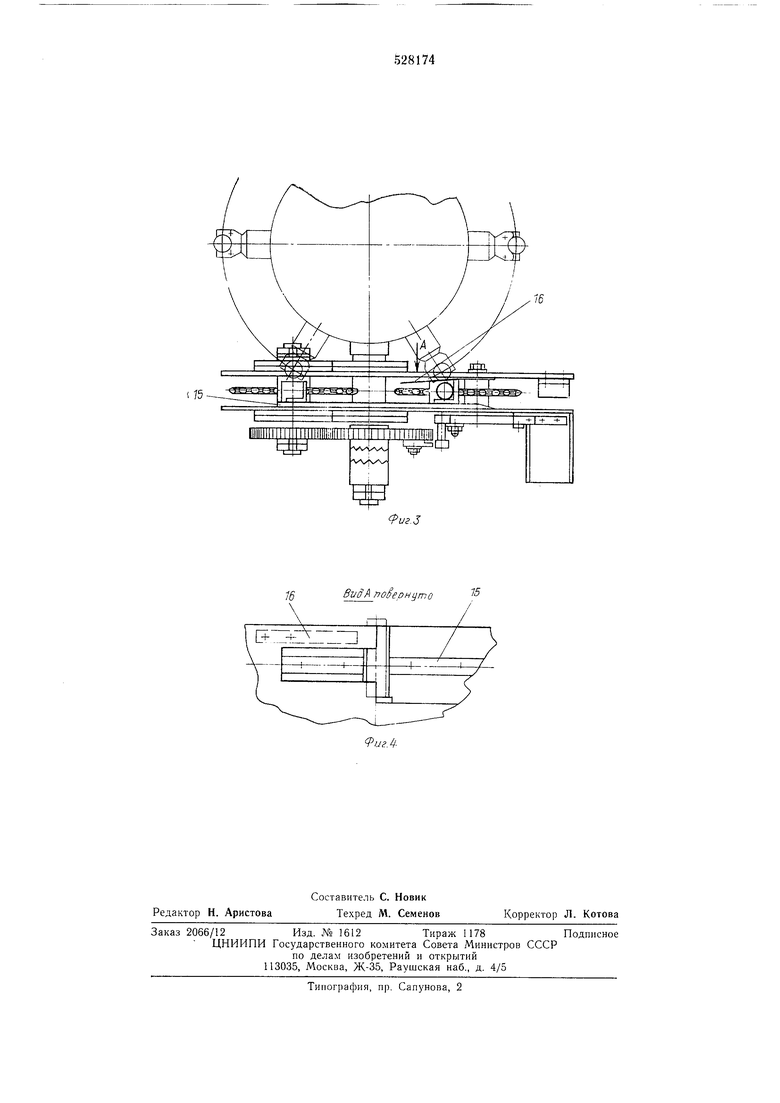
На фиг. 1 изображено устройство для загрузки деталей, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид в плане; на фиг. 4 - вид по стрелке А на фиг. 3.
Устройство содержит каркас 1, внутри которого имеется полка 2 для приема деталей с лотка 3, смонтированный внутри каркаса транспортер 4, на цепях которого закреплены захваты 5. Кулачковый вал 6 кинематически связан с приводом станка, например роторного, посредством зубчатой передачи и имеет на одном конце связанную со звездочкой 7 шестерню, выполненную в виде тарированного по числу рабочих позиций станка диска 8. Диск 8 имеет Т-образную выточку д.|Я крепления кулачков 9. К каркасу на ocii 0 прикреплен рычаг 11. а одном конце коioporo имеется ролик 12, а на другом-подпружиненный отсекатель 13.
Для надежного захвата детали клепками ротора 14 на верхнем горизонта 1ьном участке ценного транспортера к одно11 внутренней стенке каркаса прикреплена нанрав.чяюнии планка 15, а к другой - пластинчатпя пружина 16.
Работает ycTpoiicTBo следуюни1м образом.
Детали поступают по лотку 3 к полке 2.
За.хваты 5 при перемеи1,ении их трапспортером
4 вверх, забирают с полки деталь и подают
На нем захват
на горизонтальный участок
с деталью поджимается
п.частннчатои пружипой 16 к направляющей планке 15 и при дальнейшем движенни транснортера клещи
транспортного ротора 14 входят в вырез захвата 5, захватывают деталь и подают ее на рабочую позицию станка.
В этом случае, если неисправна какая-либо рабочая позиция, то кулачок 9 ставят на тарированном диске 8 напротив piicKn с номе3
ром неисправной позиции и закрепляют. При вращении тарированного диска 8 кулачок 9 набегает на ролик 12 рычага 11. Рычаг поворачивается и отсекатель 13 прекращает доступ детали на полку, а соответствующий рабочей позиции захват 5 транспортера перемещается, не захватив деталь.
Формула изобретения
Устройство для загрузки деталей в многопозиционные станки, например роторные, содержащее цепной транспортер с захватами для деталей и связанный с ним кулачковый вал, воздействующий через рычаг на отсекатель, отличающееся тем, что, с целью обеспечения согласованной подачи деталей только на исправные рабочие позиции станка, кулачковый вал кинематически связан с приводом станка и снабжен расположенным в кинематической цени диском, на котором закреплены выдвижные кулачки, число которых согласовано с числом позиций станка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки деталей | 1991 |
|
SU1802779A3 |
| Многопозиционный автомат | 1981 |
|
SU1047613A1 |
| МНОГОПОЗИЦИОННЫЙ СТАНОКI ВСЕСОЮЗНАЯ \ | 1973 |
|
SU381499A1 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Многопозиционный сверлильный автомат | 1978 |
|
SU774819A1 |
| УСТАНОВКА ДЛЯ ЗАПОЛНЕНИЯ БАЛЛОНОВ ЖИДКОЙ УГЛЕКИСЛОТОЙ | 1966 |
|
SU184700A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Многопозиционный сверлильный автомат | 1977 |
|
SU663499A1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Автомат для сортировки деталей,имеющих форму тел вращения | 1982 |
|
SU1009538A1 |
75
2
ffvffA повернуто
