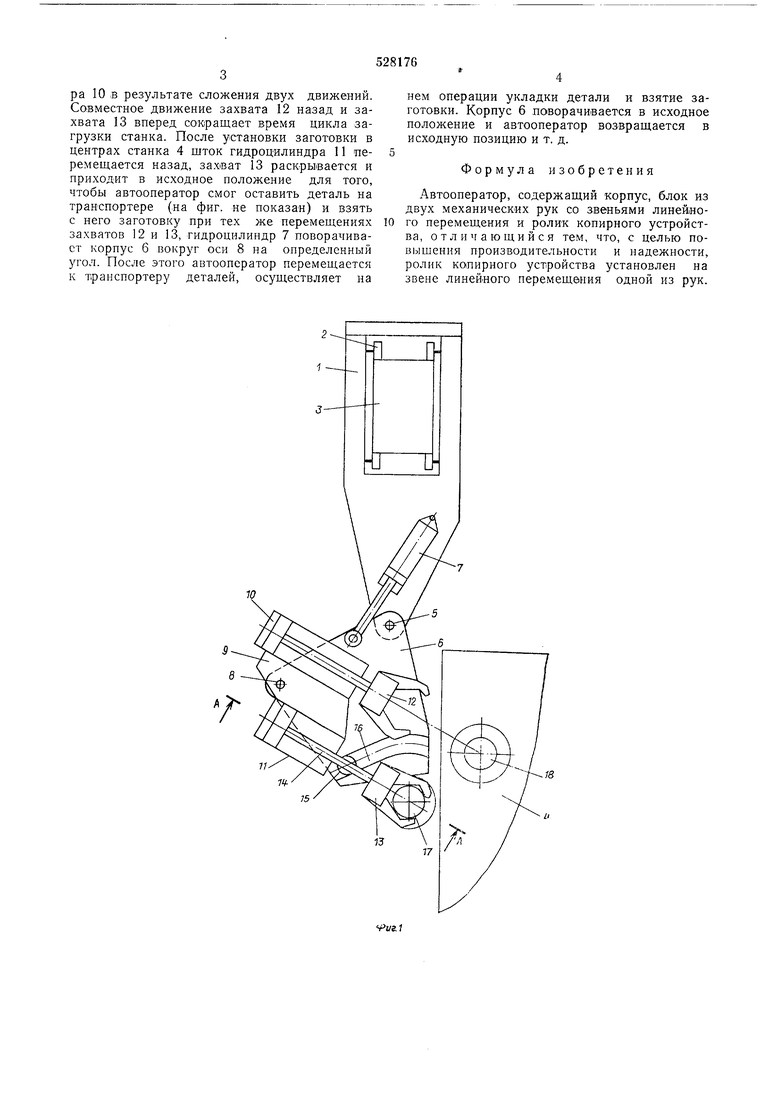
pa 10 в результате сложения двух движений. Совместное движение захвата 12 назад и захвата 13 вперед сокращает время цикла загрузки станка. После установки заготовки в центрах станка 4 шток гидродилиндра 11 перемещается назад, захват 13 раскрывается и приходит в исходное положение для того, чтобы автоонератор смог оставить деталь на транспортере (на фиг. не показан) и взять с него заготовку при тех же перемещениях захватов 12 и 13, гидроцилипдр 7 поворачивает корпус 6 вокруг оси 8 на определенный угол. После этого автооператор перемещается к транспортеру деталей, осуществляет на
нем операции укладки детали и взятие заготовки. Корпус 6 поворачивается в исходное положение и автооператор возвращается в исходную позицию и т. д.
Формула изобретения
Автооператор, содержащий корпус, блок из двух механических рук со звеньями линейного перемещения и ролик копирного устройства, отличающийся тем, что, с целью повыщения производительности и надежности, ролик копирного устройства установлен на звене линейного перемещения одной из рук.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1973 |
|
SU404607A1 |
| Автоматическая линия изготовления прутковых длинномерных изделий | 1980 |
|
SU920343A1 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| АВТООПЕРАТОР | 1965 |
|
SU174928A1 |
| АВТООПЕРАТОР | 1972 |
|
SU424690A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автоматическая линия для обработки деталей типа валов | 1975 |
|
SU549321A1 |
| АВТООПЕРАТОР | 1969 |
|
SU253548A1 |
| Автооператор | 1984 |
|
SU1217654A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
11
D
.2
