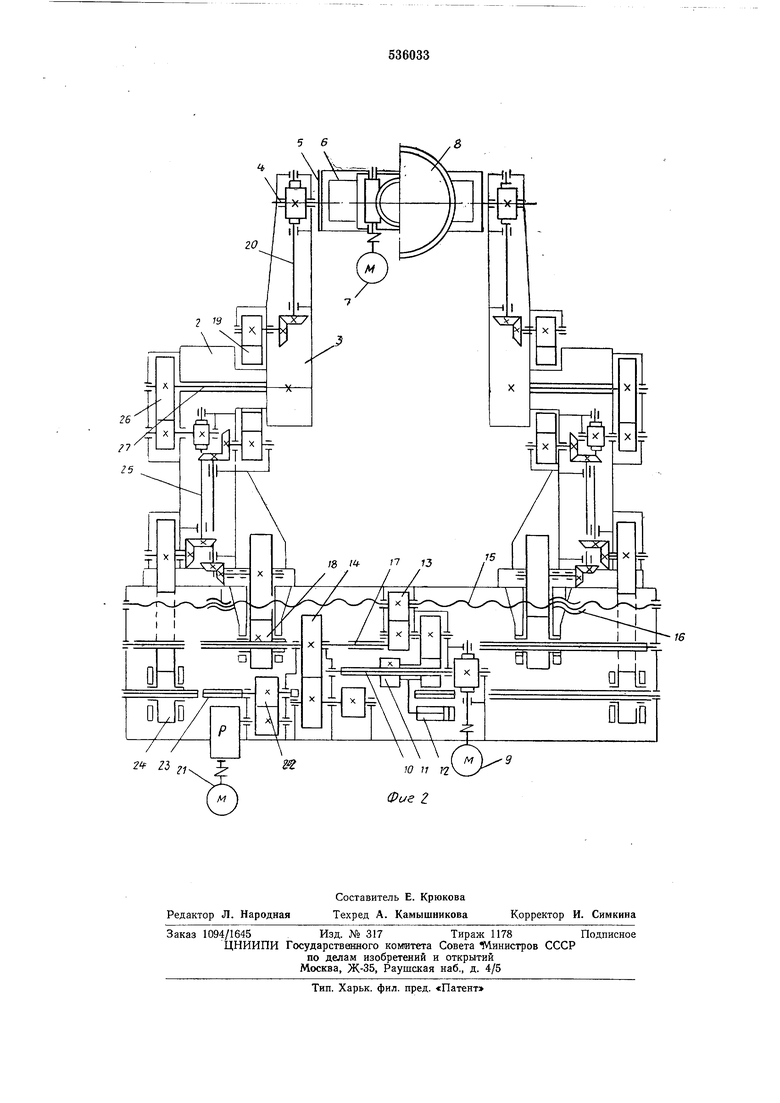
Маьгипулятор состоит ,из станины /, которая выполнен а пустотелой и в верхней части имеет .направляющие, где смонтированы с возможностью продольного Перемещения стойки 2. В верхнюю часть стое,к вмонтированы поворотные кронштейны 3, на свободных концах которых размещены пустотелые щлиядели 4 с поворотными дисками 5.
К. дискам 5 мож.ет .непосредственно крепиться изделие .или траверса 6 с поворотной от своего .привода 7 планшайбой 8 -с закрепленным на .ней изделием.
(Внутри станины смонтирован механизм для одновременного продольного перемещения стоек 2, привод 9 которого соединен со шлицевым валом 10, оснащенным блоком щестерен 11, соединяющимися при .помощи пневмоцилйндра 12 поочередно с блоком ведущих шестерен 13 или 14.
Шестерня 13 закреплена на ходовом в. /5, .Ходовые гайки 16 которого закреплены в Стойках. Ведущая щестерня 14 механизма для поВОрота дисков закреплена в оередиле щлиЦевого вала 17, смонтированного ,в станине, а 1ведомые щестерни IS - в стойках симМСтрично относительно Места закрепления шестерни 14. Ведомые щестерни 18 кинематически посредством двух конических пар, смонтированных в стойке, ларазитной шестерни 19 и конической пары 20, смо.нтированной в Кронштейне, связ-аны с дИОками 5.
Механизм для иоворОта кронштейнов имеет СВОЙ привод 21/, соединенный с ведущей щестерней 22, закрепленной в середине щлиЦевого в.ала 23, смонтирова.нного в ста.н.ине. Ведомые щестерни 24 закреплены в стойках 2 симметри-чно относительно места закрепления ведущей щестерни 22 .и кинематически Связаны Посредством .конической лары 25, смо.нти.раванной в стойке, с щестерней 26, жестко установленной на валу 27 кронщтейва i3. ,
Манипулятор работает следующим образом.
Траверсу 6 с .планшайбой 8 подают .в зону .работы манипулятора и пневмощилиндром 12 блок шестерен // ,пр.иводят .в зацепление с блоком щестерни 13 ходового винта 15. При этом включая привод 9, ходовой винт 15 вращается, а ходовые гайки 16 перемещают стойки 2 .н.а расстояние, необходимое для закрепления траверсы 6 на дисках 5.
При включени.и яривода 21 ведомые щестерни 24 щлицевого вала 23 посредством кинематической связи с валом 27 кронщтейна 3 повораЧИВают кронщтейны до тех пор, пока ДИ.С1КИ ,5 не сопрягу тс я с торцами траверсы 6. После чего траверса 6 болтами закрепляется яа дисках 5.
З.атем пневмоцилиндром 12 блок щестерен // перемещают влево .и .приводят в зацепление с блоком ведущей .щестерни 14 механизма для поворота дисков 5. В этом случае 5 при вклюЧении привода 9 щестер.ня 14 через щлицевой вал 17 .и ведомые шестерни 18, кинематически связанные с дисками 5, поворачивает последние так, чтобы планщайба 8 |была в го;ризонтальном положении.
0 Включением привода 21 механизма поворота кронштейнов 3 можно уста.новить планшайбу 8 на высоте, удобной для работы. В этом положении производят сборку и прихватку изделия.
Затем траверсу 6 с пл.аншайбой 8 включением привода 9 и поворотом дисков 5 устанавливают так, чтобы удобно было производить сварку «в лодочку горизонтальных 0 .щвов.
Включая пр.иводы 9, 21 и привод для .вращения планшайбы, можно производить сварку всех щвов в любом пространственнОМ положении. 5
Предложенный манипулятор дает сокрац|ение производственной площади на 30- 40%, ведет к ликвидации -цехового подъемно-транспортного Оборудования.
Формула -изобретения
|Кантователь-манипулятор для сборочносварОчных работ, содержащий станину с двумя стойкам.и, одна из которых подвижна, несущими поворотные кронштейны, Оснащенные поворотными дискам.и для крепле.ния изделия, а также механизм для перемещения одной из Стоек, механизм для поворота дисков и механизм .для одновременного поворота кронштейнов, выполненный в виде приВ|Одного от ведущей шестерни шлищевого вала и двух ведомых щестерен, каждая из которых кинематически связала с кро.нщтейном, о т5 ли чающийся тем, что, с делью повы.щевия его универсальности, вторая стойка также установлена С возможностью продольного перемещения одновременно с первой от ее Механизма для продольного перемещения, .при
0 этом .механизм для .поворота дисков выполНен в .виде приводного от ведущей щестер.ни шлицеВОто вала с двумя ведомыми шестернями, кинеМатичеоки связанным.и с дисками, причем шлицевой вал механизма.для поворота кронштейнов и щлицевой .в.ал механизма для поворОта дисков смонтированы в станине, а их Ведомые шестерни закреплены в стойках симметрично относительно места закрепления их (ведущих щестерен.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки полосового материала | 1980 |
|
SU990366A1 |
| Устройство для контактной точечной сварки пространственных арматурных каркасов | 1974 |
|
SU595043A1 |
| ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ | 1971 |
|
SU306953A1 |
| ДЕРЕВООБРАБАТЫВАЮЩИЙ НАСТОЛЬНЫЙ КОМБИНИРОВАННЫЙ СТАНОК | 1992 |
|
RU2015877C1 |
| Устройство для подачи ленточного материала в зону обработки | 1981 |
|
SU1011306A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Многопозиционный, многошпиндельный полуавтоматический станок карусельного типа | 1960 |
|
SU139898A1 |
| Станок для заточки зубьев многолезвийного фасонного инструмента | 1976 |
|
SU737193A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Манипулятор для сварочно-наплавочных работ | 1981 |
|
SU969492A1 |