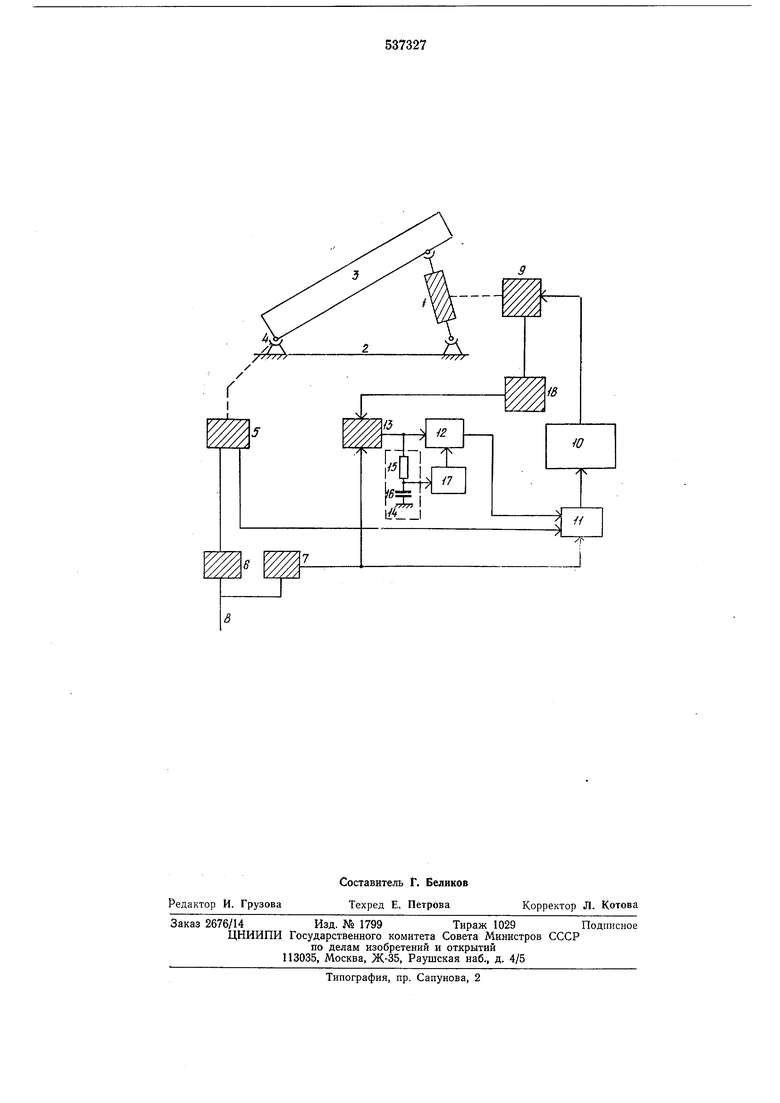
Привод содержит исполнительный механизм 1 поступательного действия, шарнирпо связанный с основанием 2 и качающейся частью 3 объекта, вращающейся вокруг оси цапф 4, первый вращающийся трансформатор 5, механически связанный с осью цапф 4 и синхронной связью-с вторым вращающимся трансформатором 6, который механически соединен с первым тахогенератором 7 и командной осью 8, двигатель 9. Двигатель механически связан с исполнительным механизмом 1, а электрически-с выходом управляемого источника 10 питания. Кроме того, предлагаемый привод включает в себя первый усилитель 11, выход которого соединен с входом управляемого источника 10 питания, первый вход - с выходом трансформатора 5, а второй вход - с выходом второго сумматора 12. Первый вход сумматора 12 подключен к выходу первого сумматора 13 и входу интегрирующего блока 14, состоящего из последовательно соединенных резистора 15 и конденсатора 16, а второй вход-к выходу второго усилителя 17. Третий вход усилителя 11 соединен с выходом тахогенератора 7 и с первым входом сумматора 13, второй вход сумматора 13 - с выходом второго тахогенератора 18, который механически связан с двигателем 9, вход усилителя 17 -- со средним выводом интегрирующего блока 14.
Работает привод следующим образом.
Вращением командной оси задается сигнал рассогласования и скорость вращения качающейся части 3 вокруг оси цапф 4. С выхода трансформатора 5 сигнал рассогласования (ощибка слежения по углу) подается на первый вход усилителя 11. На второй вход этого Зсилителя проходит сигнал с выхода сумматора 12. На один вход сумматора 12 поступает разностный сигнал тахогенераторов 7 и 18 через сумматор 13, а на другой его вход - постоянная составляющая разностного сигнала, изменяющаяся в соответствии с изменением передаточного числа. Эта составляющая выделяется с помощью интегрирующего блока 14 и, проходя через усилитель 17, в противофазе поступает на второй вход сумматора 12.
Таким образом, на выходе сумматора 12 имеется только динамическая составляющая разностного сигнала, величина которой не зависит от изменения передаточного числа силовой цепи. Для обеспечения движения качающейся части 3 с требуемой скоростью на третий вход усилителя 11 поступает сигнал непосредственно с тахогенератора 7. Для того, чтобы осуществить коррекцию оборотов двигателя 9 в соответствии с изменением передаточного числа силовой цепи, сигнал с выхода усилителя 17 должен не только компенсировать постоянную составляющую разностного сигнала, но и обеспечить некоторое превышение сигнала, что достигается выбором коэффициента усиления усилителя 17.
Положительным техническим эффектом
изобретения является имеющееся сочетание сигналов на входах усилителя 11, благодаря этому - движение нагрузки с требуемой скоростью, стабилизация скорости в динамике, в то же время медлениое изменение скорости
вращения принимающего тахогенератора в соответствии с изменением передаточного числа не вызывает дополнительного увеличения ошибки по углу, т. е. точность работы такой схемы в динамике во всем диапазоне рабочих
углов повышается.
Формула изобретения
Следящий привод, содержащий исполнительный механизм, соединенный с объектом,
первый вращающийся трансформатор (ВТ), первым выходом подключенный к первому входу первого усилителя, вторым выходом-к второму ВТ, соединенному с первым тахогеиератором, двигатель, соединенный с исполиительным механизмом, управляемый источник питания, входом подключенный к выходу первого усилителя, а выходом - к входу двигателя, второй тахогенератор, выходом подключенный к первому входу первого сумматора, второй вход которого подключен к выходу первого тахогенератора, отличающийся тем, что, с целью повышения точности привода, он содержит второй сумматор, интегрирующий блок и второй усилитель, при
этом выход первого сумматора подключен к первому входу второго сумматора и к входу интегрирующего блока, выход которого через последовательно соединенные второй усилитель и второй сумматор подключен к второму
входу первого усилителя, а третий вход первого усилителя подключен к выходу первого тахогенератора.
I
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1977 |
|
SU857924A1 |
| Следящая система | 1975 |
|
SU533908A1 |
| Следящая система | 1978 |
|
SU744432A1 |
| Следящий привод | 1974 |
|
SU550630A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| Двухканальная следящая система комбинированного регулирования | 1974 |
|
SU498603A1 |
| Следящая система | 1976 |
|
SU660018A1 |
| Преобразователь кода в угол поворота вала | 1989 |
|
SU1711330A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Интегрирующий привод | 1971 |
|
SU448429A1 |