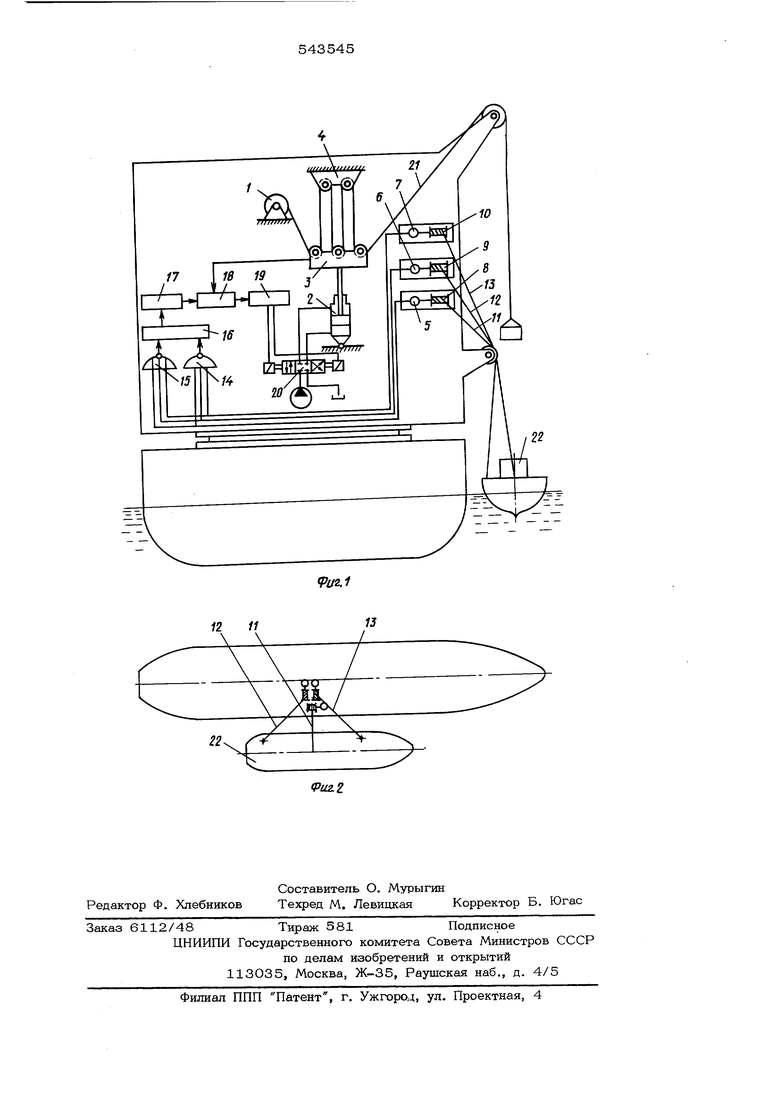
связями 11, и J3 -с палубой другого судна. Электронная схема обработки сигнало датчика, состоит из логических элементов Ш0ффера И-НЕ 14 и Пирса ИЛИ-НЕ 15, фор мирователя сигналов 16, который соединен интегратором 17, а последний с усилителем 18 и задатчиком 19, который связан с распределительным механизмом 2О. Через подвижные обоймы блоков 3 гидроцилиндра слежения 2 и неподвижные блоки 4 запасован грузовой канат 21. Трехточечный датчик относительных перемещений связан с палубой принимающего судна 22 таким образом, что один тахогенератор например тахогенератор 5, через подпружине1&ную вышку 8 и гибкую связь 11 вырабатывает сигнал, пропорциональный перемещению точки в месте приема (передачи) груза, а два других, соответственно б и 7, через подпружиненные вьющки 9 и 1О и гибкие связи 12 и 13 вырабатывают сигналы, пропорциональные продольным перемещениям точек, расположенных в носовой и кормовой частях палубы принимающего судна 22. Описанное устройство для передачи груза между ошвартованными судами в море работает следующим образом. При вертикальных перемещениях палубы принимающего судна 22 и соответственно гибких связей 11, 12 и 13 все три тахоген ратора 5, 6 и 7 вырабатывают сигналы оди наковой э.д.с. и полярности, которые поступ ют на вход логических элементов И-НЕ 14 и ИЛИ-НЕ 15. При такой комбинации сигналов формирователь 16 выдает управляющш сигнал, который, пройдя интегратор 17, уси литель 18 и задатчик 19, воздействует на распределительный механизм 20. Последний срабатывая, направляет рабочую жидкость, в ту или иную полость гидроцилиндра слежения 2, осуществляющего через подвижную обойму блоков 3 перемещение груза в соответствии с вертикальными перемещениями палубы принимающего судна 22. При работе лебедки будет осуществляться одновременно спуск или подъем груза и таким образом безударная передача его. При продольных перемещениях палубы принимающего судна 22 одна из вьющек; например вьюшка 9, будет выбирать, а вьющ ка 10 травить соответственно гибкие связи 12 и 13, в результате чего тахогенераторы 6 и 7 будут вырабатывать э.д.с., противоположные по знаку. При такой комбинации сигналов формирователь 16 вьщает управляющий сигнал противоположный сигналу, поступающему от тахогенератора 5, гибкая связь 11 которого соединена с палубой принимающего судна 22 в месте приема (передачи) груза и на выходе задатчика 19 сигнал управляющего воздействия будет равен нулю. Вследствие этого продольное перемещзние палубы принимающего судна 22 не будет влиять на движение груза, так как при этом гидроцилиндр слежения 1 перемещаться не будет. При наличии сложных перемещений палубы принимающего судна 22, состоящих из вертикальных и продольных составляющих, все три тахогенератора 5, 6, и 7 будут вырабатывать различные сигналы, из которых на выходе схемы обработки сформируется управляющий сигнал, пропорциональный только вертикальной составляющей, который воздействуя на распределительный механизм 2О вызовет движения груза в ту или иную сторч ну в зависимости от вертикальной составляющей перемещения палубы принимающего судна 22. Формула изобретения Устройство для передачи груза между судами в море, включающее в себя грузовую лебедку с грузовым канатом, запасованным через блоки неподвижной и подвижной обойм, гидродилиндр слежения с распределительным механизмом, датчик относительных перемещений в виде тахогенератора, жестко связанного с подпружиненной вьющкой,которая соединена гибкой связью с палубой принимающего груз судна, а также электронную схему, которая содержит интегратор, связанный через усилитель с задатчиком, отличающееся тем, что, с целью исключения влияния продольных перемещений принимающего судна на режим слежения за вертикальным движением передаваемого груза, датчик относительных перемещений снабжен двумя дополнительными тахо генераторами, с подпружиненными вьющками, которые соединены с палубой принимающего груз судна в носовой и кормовой части, а электронная схема снабжена логическими элементами И-НЕ и ИЛИ-НЕ, а также формирователем управляюЕШХ сигналов, выход которого подсоединен к интегратору, а вход-к выходам логических элементов, при этом входы последних соединены с тахогенераторами.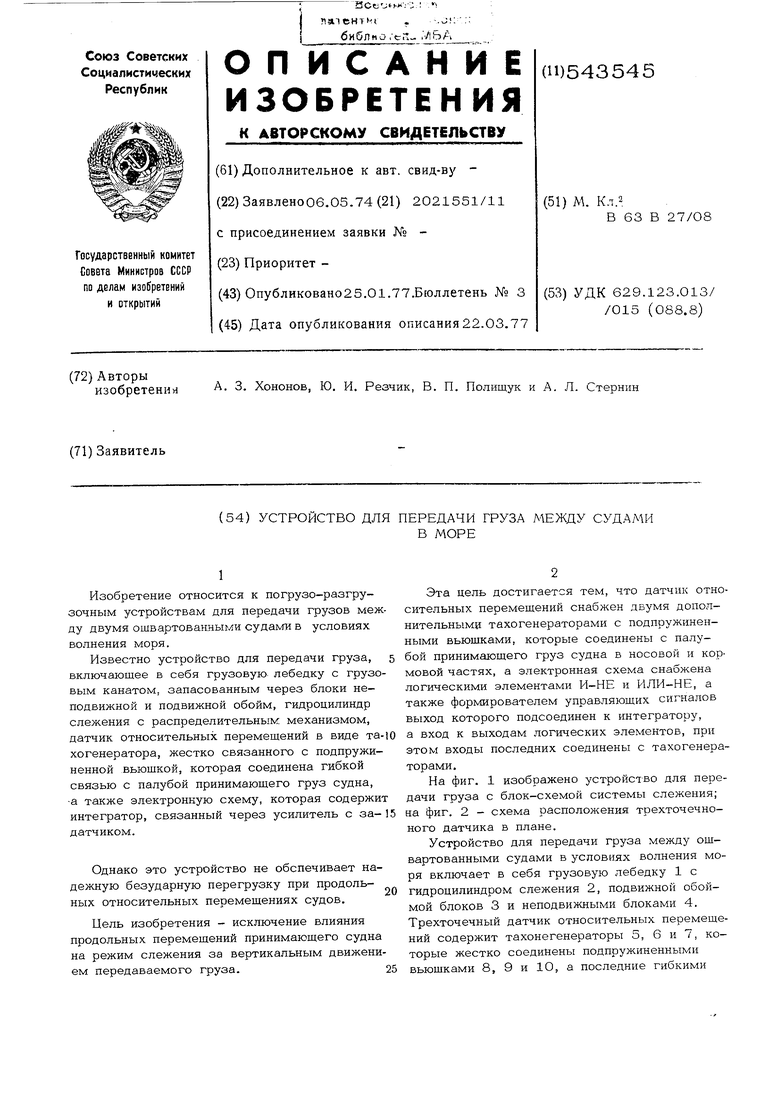
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| Устройство для передачи груза между судами в море | 1975 |
|
SU552237A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Судовое устройство для спуска и подъема катеров | 1975 |
|
SU550312A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Спуско-подъемное устройство | 1977 |
|
SU701864A1 |