(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер автоматической линии | 1984 |
|
SU1234311A1 |
| Челночный конвейер | 1976 |
|
SU673554A1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Установка для контроля герметичности полых изделий | 1986 |
|
SU1401308A1 |
| ПДТЕНТНО-ТЕХНННККйБ. В. Антонов, В. М. Александров, А. Ф. Меркулов и А. В. Мещеряков | 1971 |
|
SU304316A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Шагающий конвейер для перемещения компонентов моторных транспортных средств вдоль сборочной линии | 1982 |
|
SU1170964A3 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| Горизонтально-замкнутый тележечный конвейер | 1980 |
|
SU977306A1 |
| Формовочный автомат для изготовления литейных полуформ | 1982 |
|
SU1066727A1 |
Изобретение относится к области транспортировки и заполнения грузоносителей при помощи конвейеров с циклическим возвратно-поступательным движением и предназначено к использованию в химической промышленности, а также может найти широкое применение в тех отраслях промышленности, где применяется мягкая тара, например, ре- зино-кордные контейнеры, для транспортировки сыпучих материалов.
Известны шагающие конвейеры периодического перемещения штучных грузов-издели по отдельным технологическим операциям, включающие неподвижную и подвижную рамы приводы подъема и горизонтальных перемещений ll,
Недостатком этого устройства является отсутствие возможности заполнения грузоносителей типа мягкой тары, например резино- кордных контейнеров, сыпучими материалами
Наиболее близким техническим решением к данному изобретению является устройство, включающее раму горизонтальных перемещений, подъемную раму, стойки с катками и
приводы подъема и горизонтальных перемещений 2.
Недостатком этого шагового конвейера является то, что он не может быть использован для транспортировки и заполнения грузоносигелей типа мягкой тары, например резико-кордньЕх контейнеров, имеющих в верхней часи диаметрально расположенные проушины, в которые вставляются несущие штанги, служащие захватными приспособлениями. При больщих массах заполненной тары несущие щтанги будут иметь значительное поперечное сечение и массу, что затруднит или сделает вообще невозможным оперирование со штангами при их установке в проушины тары и съеме.
Целью изобретения явпяется снятие нагрузки, передаваемой несущим штангам, от заполненной материалом мягкой тары.
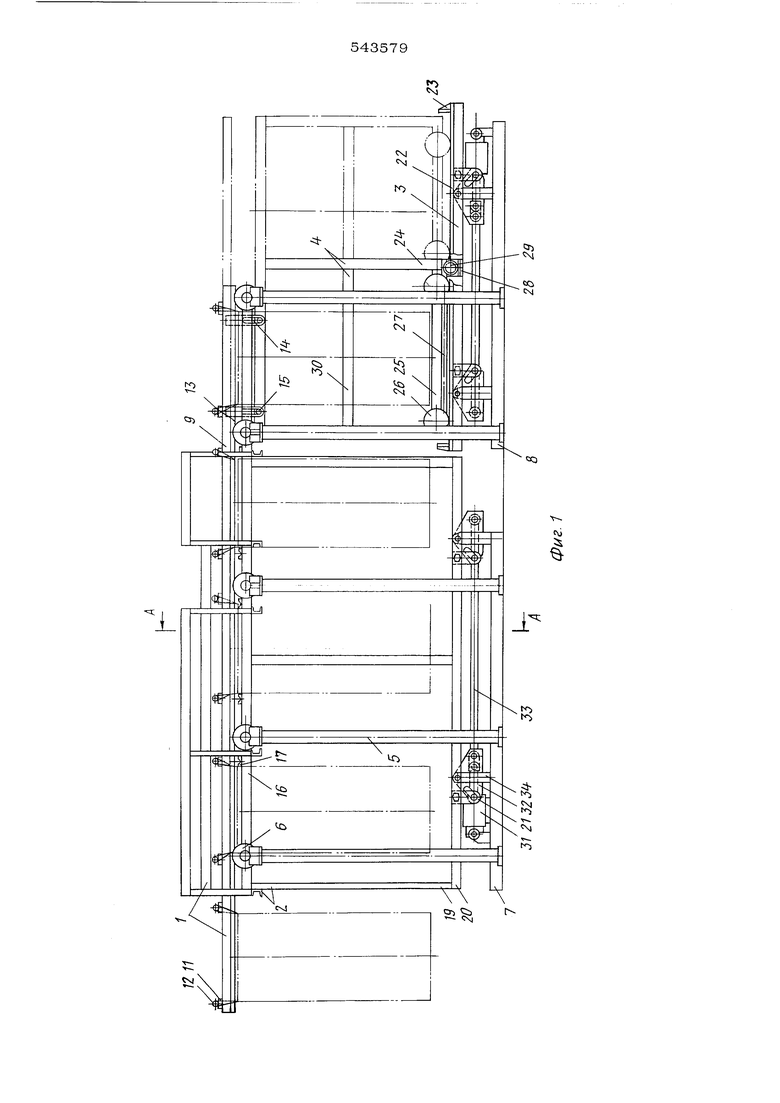
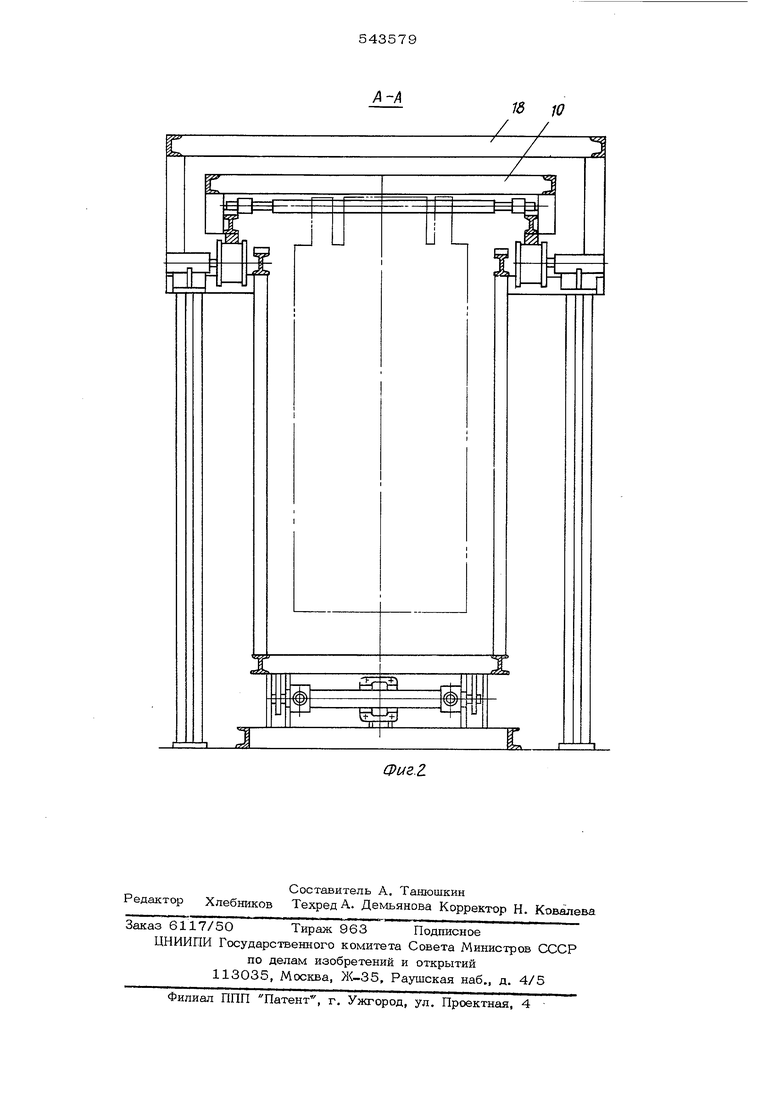
Для этого последняя секция шагового конвейера снабжена тележкой, установленной на подъемной раме и связанной посредством направляющих с рамой горизонтальных перемещений, причем привод горизонтальных перемещений установлен на подъем- НОИ раме и кинематически связан с тележкой. На фиг, 1 изображен шаговый конвейер, вид сбоку; на фиг. 2 то же, разрез но А-А на фиг. 1. Шаговый конвейер состоит из рамы 1 горизонтальных перемещений, рамы 2 верти кальных перемещений, подъемной рамы 3 с тележкой 4, стоек 5 с катками 6 и двух опорных рам 7 и 8, Рама горизонтальных перемещений 1 состоит из двух продольных балок 9, соединен ных между собой сверху поперечными связями 10. На верхних полках продольных балок приварены с определенным шагом призмы 1 для фиксированной установки опорных щтанг 12. К нижним полкам этих же балок по все их длине приварены рельсы (направляющие) прймоугольного сечения 13. На правом конне рамы приварены 4 направляющие с продольными пазами 14, в которые вставляются пальпы 15, соединяющие раму горизонтальных перемещений 1 с тележкой 4, Направляющими рельсами рама 1 опирается на катки 6 опорных стоек 5. Рама вертикальных перемещений 2 состоит из двух продольных направиляющих 16 с призмами 17 для фиксирования опорных штанг 12. При съеме мягкой тары призмы 17 расположены под призмами 11 рамы горизонтальных перемещений 1 с тем же щагом. Сверху продольные паправл5пощие 16 для жесткости соединены между собой попе речными связями 18. Продольные направляю щие 16 через стойки 19 связаны с нижней частью 20, представляющей замкнутую гори зонтальную раму с четырьмя опорными про- ущинами 21, Подъемная рама 3 представляет горизон тальную сварную раму с рельсами 22 для передвижения тележки 4,(четырех) упоров 23 и четырех опорных проущин. На рельсы 22 подъемной рамы 3 устано лена тележка 4, представляющая собой две плоские вертикальные рамы 24, соединенны в нижней части между собой горизонтальной рамой 25. В нижней части тележки установлены 4 опорных колеса 26 и зубчатая рейка 27, а на подъемной раме 3 - двигатель 28, на валу которого насажена шестерня 29, вход щая в зацепление с зубчатой рейкой 27. Двигатель с зубчатой передачей предназначен для передачи движения раме горизонтал ных перемещений, Для обеспечения подпора снизу мягкой таре, имеющей отличные размеры по высоте, на тележке предусмотрены съемные лощадки 30. Стойки 5 с катками 6 5шляются опораи для рамы 1. Опорные рамы 7 и 8 представляют собой оризонтальные рамы, опирающиеся на фунамент, В верхних частях рам установлены иловые цилиндры подъема и опускания рамы вертикальных перемещений 2 и подъемой рамы 3. Для рамы вертикальных перемещений 2 устанавливается один силовой цилиндр 31, а для подъемной рамы 3 - два силовых цилиндра 31. Силовые цилиндры с помощью рычагов 32, тяг 33, опор 34, проушин 21 и поперечин 22 выполняют подъем и опускание рам 3 и 2. Конвейер работает следующим образом. Мягкая тара, например резино-кордный контейнере продетыми в проущины щтангами 12, при помощи грузоподъемного устройства устанавливается в призмы на исходной позиции, при этом рама 1 горизонтальных перемещений находится в крайнем левом положении ,рама вертикальных неремещений 2 и подъемная рама 3 - в крайних нижних положениях. При включении шагового конвейера в работу происходит подъем подъемной рамы 3 с тележкой 4. Тележка создает подпор мягкой незаполненной таре снизу, в том случае, если тара уже находится на позиции загрузки. В случае ее отсутствия на этой позиции подъем подъемной рамы может не производиться. После подъема подъемной рамы 3 с тележкой 4 мягкая тара заполняется сыпучим метарилом. Установка тары на исходную позицию производится одновременно с ее заполнением. После установки мягкой тары на исходную позицию происходит передвижение рамы 1 на таг вправо с помощью двигателя 28 и реечного зацепления. В случае наличия тары на промежуточных позициях происходит ее смещение на один шаг, а заполненная тара вместе с тележкой 4 перемещается на позицию ее съема с транспортирующего устройства. Съем заполненной тары производится с помощью дополнительных грузоподъемных устройств. Затем подъемная рама 3 с тележкой 4 опускается в крайнее нижнее положение, а рама вертикальных перемещений 2 поднимается в крайнее верхнее положение. Эти перемещения осуществляются с помощью силовых цилиндров 31 и рычажных систем. При подъеме рамы 2 ее продольные направляющие 16 с призмами 17 снимают штанги 12 мягкой тары с призм направляющих рамы горизонтальных перемещений 1, после чего последняя возвращается в исходное положение. Затем рама вертикальных перемещений 2 также опускается в крайнее нижнее положение и щтанги с мягкой тарой ложатся на призмы рамы горизонтальных перемещений, но при этом они уже оказываются сдвинутыми на один шаг относительно своего первоначального положения. На исходную позицию вновь подается незаполненная тара, а на позиции загрузки про изводится подъем подъемной рамы с тележко и заполнение тары, т. е. цикл повторяется, Использование данного предложения напол нения и транспортировки мягкой тары дает возможность высвободить от неоправданных простоев, при загрузке тары, грузоподъемное оборудование и улучшить условия труда работающих, а также в большей мере интен сифицировать этот процесс. 6 Формула изобретения Шаговый конвейер включающий раму горизонтальных перемещений, подъемную раму, стойки с катками и приводы подъема и горизонтальных перемещений, о т л и ч а ющ и и с я тем, что, с целью снятия нагрузки, передаваемой несущим щтангам от заполненной материалом мягкой тары, последняя секция шагового конвейера снабжена тележкой, установленной на подъемной раме и связанной посредством направляющих с рамой горизонтальных перемещений, причем привод горизонтальных перемещений установлен на подъемной раме и кинематически связан с тележкой. Источники информации, принятые во внимание при экспертизе: 1,В, Ф. Вейсман.Шагающие конвейеры, М., Машиностроение, 1967, с. 26, рис. 11, 2,Л. О. Спиваковский, В. К. Дьячков, Транспортир%аощие машины, М., Машиностроекие, 1968, с. 325, рис. 232 (прототип)
hO
L
J
А-А
Id Ю
/ /
Фиг2
