(54) ПРИВОД ОХВАТА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод захвата манипулятора | 1973 |
|
SU547335A1 |
| Привод захвата манипулятора | 1978 |
|
SU674891A1 |
| Манипулятор | 1982 |
|
SU1065182A1 |
| Привод захвата манипулятора | 1976 |
|
SU607730A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Привод захвата манипулятора | 1979 |
|
SU874333A2 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
.,.„,1
Изобретение относится к машиностроению и может быть использовано в копирующих манипуляторах,
Известен привод схвата манипулятора, содержащий ведущий и ведомый стержни с рейками на их поверхности, передаточный механизм, включающий дв шарнирно установленные рейки, эубчатые колеса и опорные ролики стержней смонтированные на кронштейнах 1.
Недостатком известного устройства является большие пЬтери на трение, что уменьшает точность и чувствительность оператора к изменению полезной нагрузки.
Цель изобретения - повышение точности и уменьшение сил трения.
Это достигается благодаря тому, .что рейки гтередаточного механизма снабжены, шариковым мехнизмом, а на поверхности кронштейнов выполнены направляквдие, в которых смонтированы указанные рейки.
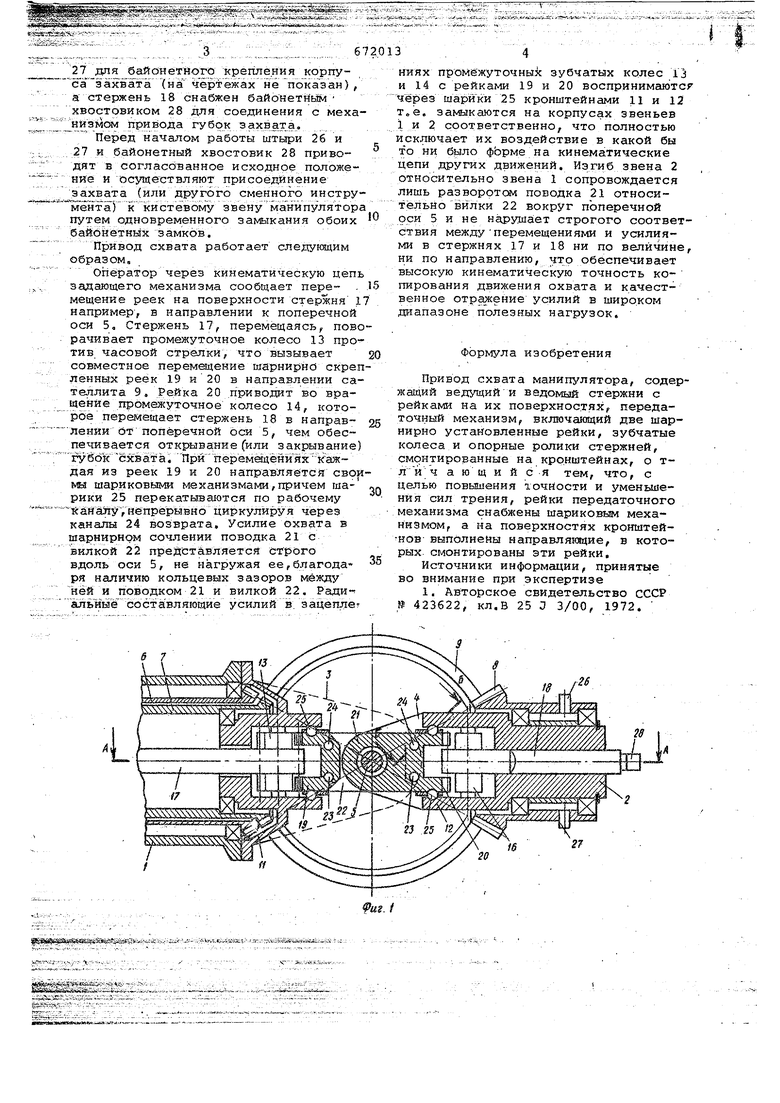
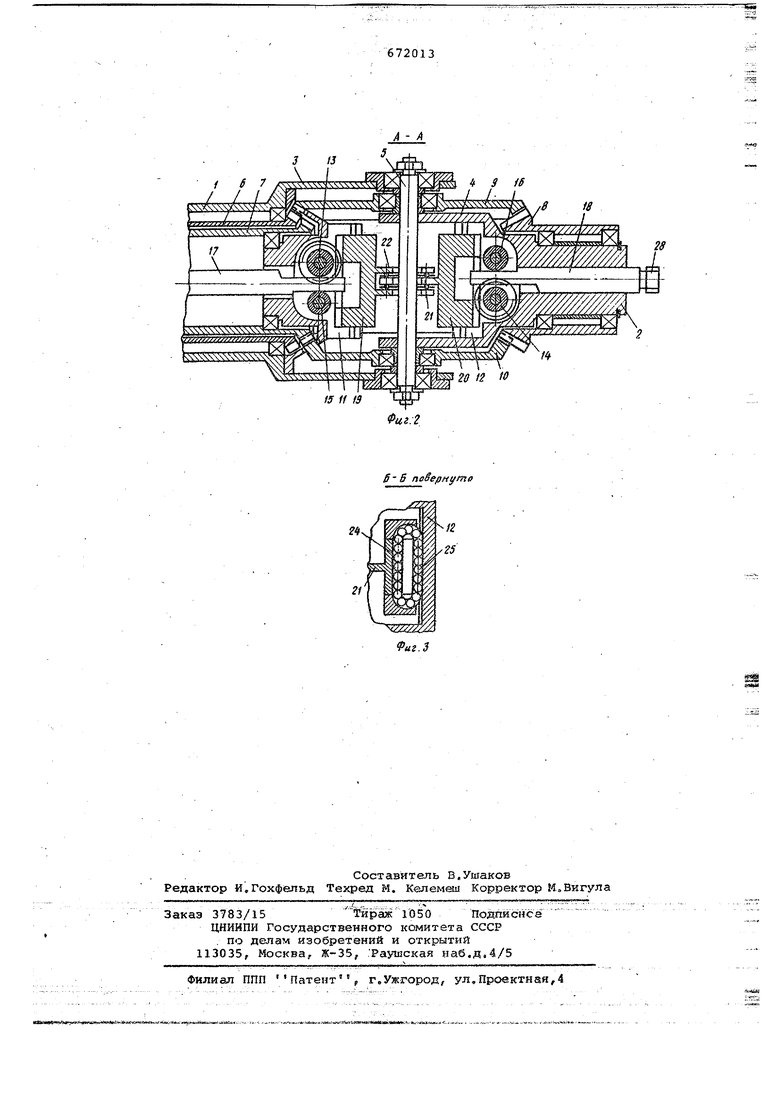
На фиг,1 изображен предлагаемый привод охвата минипулятора; на фиг.2 - разрез А-А фиг.1; на фиг.З - разрез фиг.1.
Привод охвата манипулятора состоит из-звеньев 1 и 2 с трубчатым корпусом и вилками 3 и 4, которые соединены между собой поперечной осью 5. Внутри звеньев 1 и 2 смонтированы на опорах качения солнечные колеса 6,7 и 8, сцепленные с сателлитами 9 и 10, имеющим подц1ИП1Тиковне опоры на поперечной оси 5. Вилки 3 и 4 снабжены кронштейнами 11 и 12, в которых на осях установлены промежуточные зубчатые KC&ieca 13,14 и опорные ролики 15,16, взаимодействующие со стержнями 17 и 18 с рейками на их поверхностях, установленными с возможностью возвратно- поступательных перемещений вдоль оси звеньев 1 и 2, С промежуточными зубчатьв 1и колесами 13 и 14 сопряжены также рейки 19 и 20 передаточного механизма, скрепле ные шарнирно посредством поводка 21 и вилки 22, охватывающих с равномерным кольцевым зазором поперечную ось 5.
В теле каждой из реек 19 и 20 выполнены каналы 23 и 24 возврата, обеспечивающие замкнутую циркуляцию шариков 25 шарнирного механизма, за-полняющих также, рабочие каналы, образованные полукруглыми канавками на обращенных друг, к другу сторонах реек. 19,2О и кронштейнов 11,12. Солнечное колесо 8 имеет штыри 26 и. 27 для байонетйрго крепления корпу са захвата (на чертежах не показан), а стержень 18 снабжен байонетньЛм хвостовиком 28 для соединения с меха кйзмсм привода губок захвата, Перед началом работы штыри 26 и 27 к байонетный хвостовик 28 приводят в согласованное исходное положение и осуществляют присоединение захвата (или другого сменного инстру ISeffTa) к кистев6му звену манйпулятор путем одновременного замыкания обоих байойётных замков. Привод схвата работает следукнцим образом. Оператор через кинематическую цепь задающего механизма сообщает пере- . мещение реек на поверхности стержня 1 например , в направлении к поперечной оси 5, Стержень 17, перемещаясь, пово рачивает промежуточное колесо 13 против, часовой стрелки, что вызывает совместное перемещение шарнирно скреп ленных реек 19 и20 в направлении сателлита 9, Рейка 20 приводит во вравдеНйе промежуточное колесо 14, которое перемещает стержень 18 в направ Ленин отпоперечной оси 5, чем обеспечивается открывание (или закрывание губбк схвата. Прй перемадеййях Каждая из реек 19 и 20 направляётся свои №8 шариковыми механизмами,причем шарики 25 перекатываются по рабочему иййалуунепрерывно циркулируя через каналы 24 возврата. Усилие охвата в шарнирном сочлении поводка 21 с вилкой 22 прейставляется cfporo вдоль оси 5, не нагружая ее,благодаря наличию кольцевых зазоров между ней и поводком 21 и вилкой 22, Радиальные ссставляющие усилий в. зацепле
|Sftsei as5S « iS sfgfesSi
Л§Й(.,А(.С - Л
WifSll ...v. -ч, .
672013 ниях промежуточных зубчатых колес 13 и 14 с рейками 19 и 20 воспринимаются через шарйки 25 кронштейнами 11 и 12 т„е. замыкаются на корпусах звеньев 1 и 2 соответственно, что полностью и сключает их воздействие в какой бы то ни бьзло форме на кинематические цепи других движений. Изгиб звена 2 относительно звена 1 сопровождается лишь развороте поводка 21 относительно вилки 22 вокруг поперечной оси 5 и не нарушает строгого соответствия междуперемещениями и усилиями в стержнях 17 и 18 ни по величине, ни по направлению, что обеспечивает высокую кинематическую точность копирования движения охвата и качественное отражение усилий в широком диапазоне полезных нагрузок. Формула изобретения Привод схвата манипулятора, содержащий ведущийИ ведомый стержни с рейками на их поверхнос.тях, передаточный механизм, включающий две шарнирно установленные рейки, зубчатые колеса и опорные ролики стержней, смонтированные на кро.нштейнах, о тл и ч а ю щ и и с я тем, что, с целью повьЕнения ючйости и уменьшения сил трения, рейки передаточного механизма снабжены шариковым механизмом, а на поверхностях кронштейнов выполнены направляющие, в которых смонтированы эти рейки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР . 423622, кл.В 25 D 3/00, 1972.
IS If f3
