(54) МЕХАНИЧЕСКАЯ РУКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1979 |
|
SU804170A1 |
| Механическая рука | 1978 |
|
SU795706A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Захват | 1977 |
|
SU667396A1 |
| Грейферная подача к штамповочному прессу | 1980 |
|
SU980915A1 |
| Грузозахватное устройство | 1988 |
|
SU1696371A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
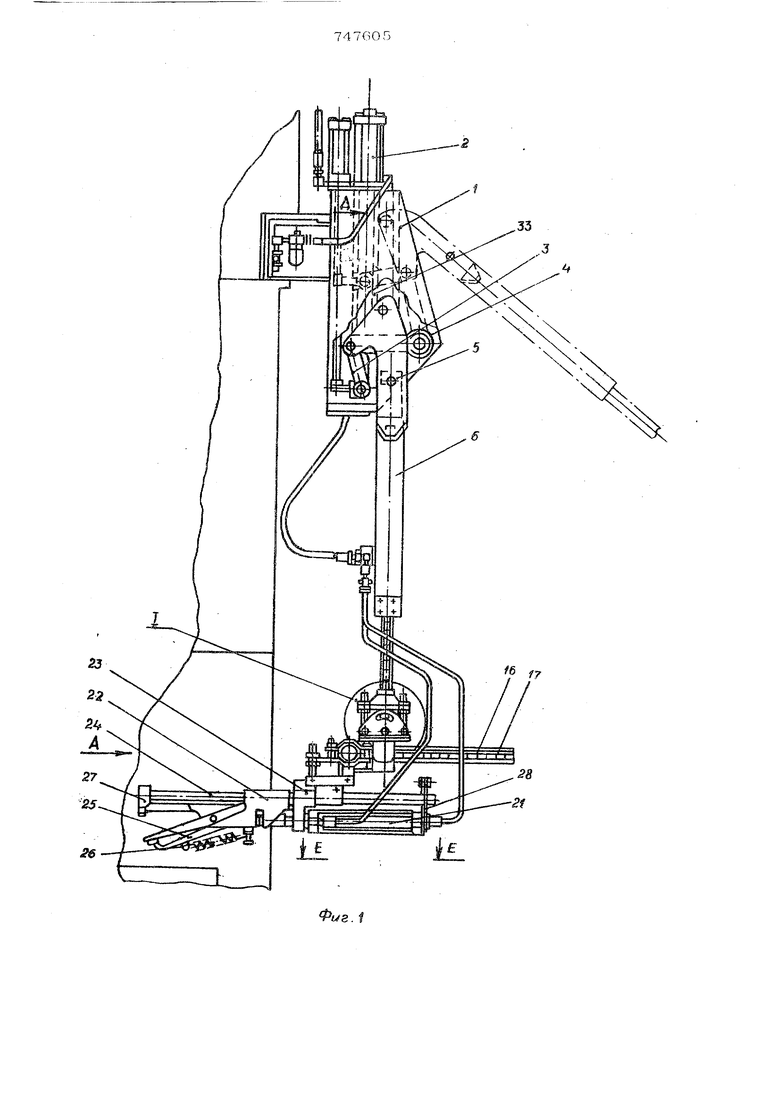

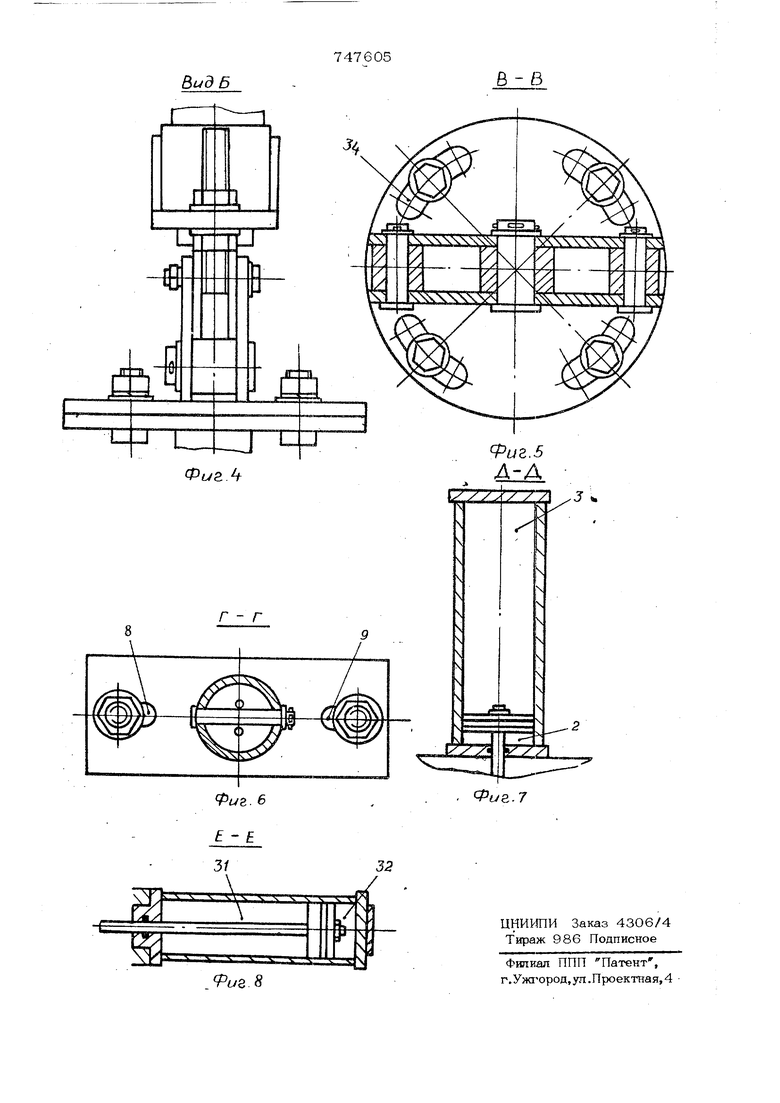
Изобретение относится к вспомогател ному оборудованию кузнечно-прессовых цехов, а именно к устройствам для манипулирования заготовками в процессе их обработки. Известна механическая рука, содержащая смонтирован1О 1й на корпусе силовой цилиндру связанный посредством кулис и рычага с рычагчэм переноса, захваты, установленные на ползушках, связанных со штоками дополнительных горизонтальных силовых цилиндров, размещенных в индивидуальном корпусе, а также узел соединения индивидуального корпуса с рычагом переноса ij. Недостатком этой механической руки является невысокая надедшость работы за счет недостаточной жесткости фиксиро вания захватов. Цель изобретения - устранение указав ного недостатка. С этой целью узел соединения индивя дуального корпуса с рычагом переноса выполнен в виде основного крошнтейнв с вертикальной и горизонтальными полками, и связанного с ним посредством пальца дополнительного кронштейна с дугообразными пазами под крепежные элементы указанного индивидуального корпуса дополнительных горизонтальных силовых цилИ| дров при этом в горизонтальных полках основного кронштейна выполнены пазы под регулируемые тяги, шарнирно связанные с дополнительным кронштейном. На фиг. 1 схематически иаображева механическая рука, оОцкй вид: на фиг. 2 вид А на фиг. 1; на фиг. 3 - узея Т на фиг. 1; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - разрез В на фиг. 3; на фиг.бразрез на фиг. 3; на фиг. 7 - разрез Д-Д на фиг. 1; на фиг. 8 - разрез Е-Е ha фиг. 1 Механическая рука содержит корпус 1 с расположенным на нем силовым цили дром 2. Внутри корпуса смонтированы малая 3 и большая 4 кулисы и трехилечий рычаг 5. Силовой цилиндр, малая и шая кулисы и трехтшечий , кинема37тически с5вязаны между собой. С трехттлечим рычагом соединен рычаг 6 переноса, на котором смонтирован основной кронштейн 7. В основном крошдтейне, в горизонтальных его полках выполнены пазы 8 и 9, черев которые пропущены тяги 10с гайками 11, а в вертикальной его полке выполнены отверстия, через которые npoTijщены болт 12 и палец 13. Тяги 10 шарнирно соединены с дополнительным кронштейном 14, который связан через болт 12 и палец 13 с основным кронштейном 7, На дополнительном кронштейне 14, име ющем дугообразные пааы в стойках и в основании, смонтирован индивидуальный кронштейн 15 крепления скалки 16 с делениями 17, не котором с возможностью регулировки установлена поперечина 18, К поперечине 18 при помоши скоб 19 кре пятся захваты 20 с дополнительными горизонтальнымй сгоювыми цилиндрами 21 привода, ползушек 22, корпус 23 и штанга 24. На ползушке 22 установлен рычаг 25, передняя часть которого оканчивается под внжной губкой, а задняя его часть выполнена в виде кулачка. В раскрытом положе нии подвижная губка (рычаг 25) удерживается пружиной 26. На штанге со cтopo ны ползушки установлен упор 27, а с тфо тивоположной стороны кронштейн 28, на котором крепится одним концом дополнительный горизонтальный силовой цилиндр, другой конец его крепится в корпусе 23, Позицией 29 обозначена штоковая полость силового цилиндра 2. Позицией 30, обозначена неподвижная губка ползушки 22,а позициями 31 и 32 -штоковая и поршневая полости дополнительног горизонтального силового цилиндра 21.. Позицией 33 обозначены направляющие корпуса 1, а позицией 34 - дугообразные паэы в промежуточном кронштейне 14. По зициями 35 и 36 обозначены болты с гай ками, В исходном положении перед захватом изделий ползушка 22 и рычаг 25 захва. тов 20 находятся в крайнем правом положении (раскрытом) за счет подачи знерго ноеителя в штоковую 31 полость доподшитеяьного горизонтального силового цилиндра 21 и оттяжкой рычага 25 пружиной 2в. Рычаг переноса 6 в этом случае находится в вертикальном поиожении, что гпечявается собственным весом руки. осуществления захвата изделия {н покааай&К поршневую 32 тюлость подается ввергоноетх-гедь, а штоковая полость 54 31ттри этом coeдп шeтcя через дроссель {не показан) с атмосферой (со сливом), В результате этого ползушка 22 с неподвижной губкой 30 и рычагом 25 выдвигается вперед по штанге 24 до упора 27 кулачком рычага 25, вследствие чего происходит зажим и удержание детали. Затем иодачей энергоносителя в штоковую 29 полость силового цилиндра 2 начинает перемещаться в верхнее положение поршень со штоком конец которого соединен с малой 3 кулисой и оканчивается двумя роликами (не показаны), расположенными между направляющими 33. При этом малая 3 кулиса , соединенная другим концом со средней частью трехплечего рычага 5, перемешает его вверх по направл5пошим 33 с помощью двух роликов ( не показаны), укрепленных в верхней части трехплечего рычага 5. При подъеме последнего большая кулиса, соединенная одним концом со средней частью трехплечего рычага 5, а другим - с корпусом 1 поворачивается по часовой стрелке, разворачивая трехплечий рычаг 5 против часовой стрелки вокруг роликов на его верхней части. Совершая такое перемещание, трехплечий рычаг 5 отводит в крайнее верхнее положение закрепленный на нем рычаг переносу 6. При достижении рычагом переноса 6 крайне верхнего положения в штоковую 31 тюлость дополнительного горизонтального силового цилиндра 21 подается энергоноситель, а поршневая 32полость при этом соединяется дроссель (не показан) с атмосферой (со сливом). Ползушка 22 и рычаг 25 перемешаются назад. Рычаг 25 пружиной 26 оттягивается и изделие выпадает. Для возврата в исходное положение штоковая полость 29 силового цилиндра 2 соединяется через дроссель (не показано) с атмосферой (со сливом). Под действием собственной массы под вижных частей рука возвращается в исходное положение (нижнее), и цикл тювторяерся в ошюанной последовательности. Регулировка угла наклона захватов в вертикальной плоскости осуществляется с помощью дополнительного кронштейна 14, тяг 10, гаек 11 и болта 12, а регулировка угла поворота зедватов в горизончвльной tmocKoeTa также осуществляется с помощыо дополнительного кронштейна 14, болтов 35 и гаек 36. Описанная конструкция механической руки обладает повышенной надежностью реботы за счет увеличения жесткости фикси рования захватов. . Формула изобретения Механическая рука, содержащая смовьтированный на корпусе силовой цилиндр, связанный посредством кулис и рычага с рычагом переноса, захваты, установленны на ползушках, связанных со штоками донолннтельных горизонтальных силовых цилиндров, размещенных в индивидуальном корпусе, а также узел соединения шшнвидуального корпуса с рычагом переноса, отличающаяся тем, что, с целью повьпиения надежности работы за счет увеличения жесткости фиксирования 7 5 захватов, узел соедивення индивидуального корпуса с рычагом переноса выполнен в вв д основвого кронштейва с вертшсальной и горизонтальными полками, и связанного с ним посредством шльаа дополнительного кронштейна с дугообраанымн пазами под крепежные алвменты указанного инднввдуального корпуса дополнительных горяэовтальшых силсюых цшшвцров, при атом в горизонтальных полках основного крошитейна выполх ены пазы под регулируемые тягв, шарнирно связанные с дополвнтельвым кронштейном. Источники информации, принятые во внимание при экспертвае 1. Описание механической руки фирмы D3hiko«ujcxjerna-Hcirimc3 Heov/yinofustrifrs 4oUd, Япония, 1970.
Фиг. 1
Вид Б
6-Б
