(54) гаДРОКОПИРОВАЛЬНЫЙ СУППОРТ
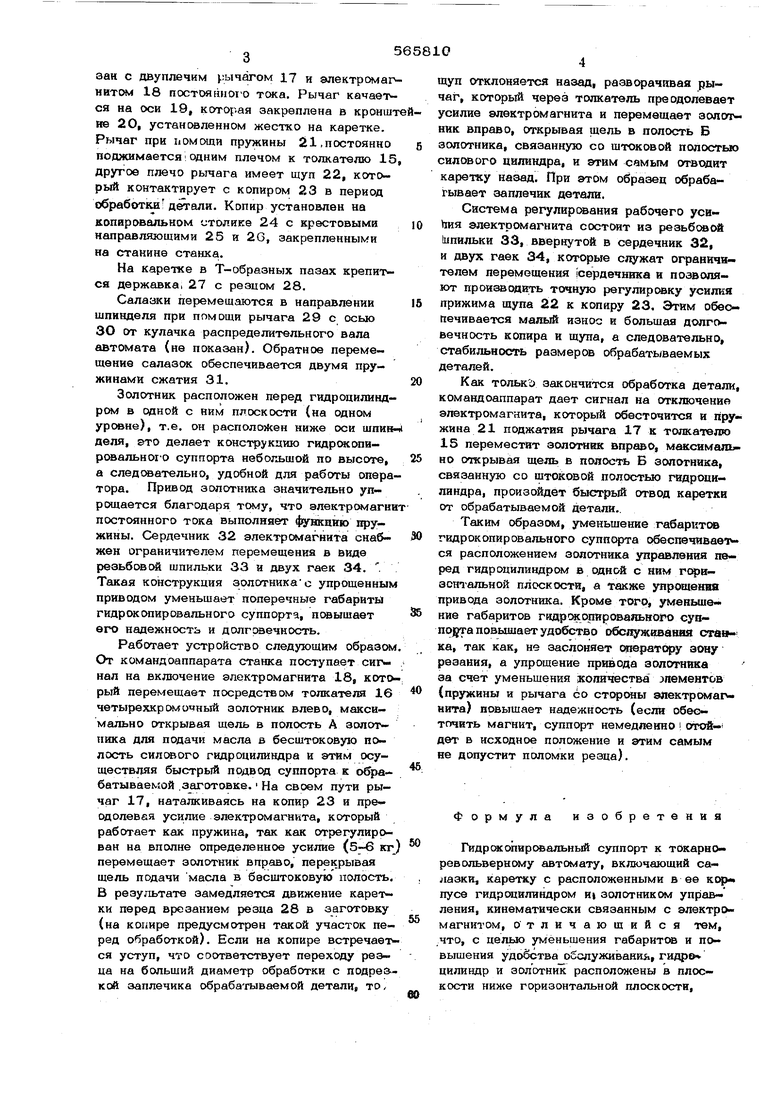
К ТОКАРНО-РЕВОЛЬВЕРНОМУ АВТОМАТУ аан с двуплечим рычагом 17 и элeктpoмar нитом 18 nocTDHHHOiO тока. Рычаг качается на оси 19, которая закреплена в кроншт не 20, устансжленном жестко на каретке. Рычаг при помощи пружины 21,постоянно поджимается одним плечом к толкателю 15 другое плечо рычага имеет щуп 22, который контактирует с копиром 23 в период обработки: детали. Копир установлен на копировальном 1;толиЕе 24 с крестовыми направляющими 25 и 20, закрепленными на станине станка. На каретке в Т-образных пазах крепится державка, 27 с резцом 28, Салааки перемещаются в направлении шпинделя при помощи рычага 29 с осью ЗО от кулачка распределительного вала автомата (не показан). Обратное перемещение салазсж обеспечивается двумя пружинами сжатия 31, Золотник расположен перед гидроцилиндром в одной с ним плоскости (на одном ), т.е. он расположен ниже оси шпинделя, это делает конструкцию гидрснсопирсвальног-о суппорта небольшой по высоте, а следовательно, удобной для работы опера тора. Привод золотника значительно упрощается благодаря тому, что электромагни постоянного тока выполняет 4 нкнию пружины. Сердечник 32 электромагнита снабжен ограничителем перемещения в виде резьбовой шпильки 33 и двух гаек 34, . Такая конструкция золотникас упрощенным приводом уменьщает поперечные габариты гидрокопировального суппорта, повышает его надежность и долг вечность. Работает устройство следующим образом От командоаппарата станка поступает сигнал на включение электромагнита 18, кото рый перемещает посредством толкателя 16 четырехкр ом очный золотник влево, максимально открывая щель в полость А золотника для подачи масла в бесщтоковуто полость силсжого гидроцилиндра и этим осуществляя быстрый подвод суппорта к обрабатываемой .заготовке. На своем пути рычаг 17, наталкиваясь на копир 23 и преодолевая усилие электромагнита, который работает как пружина, так как отрегулирован на вполне определенное усилие (5-6 кг перемещает золотник вправо, перек рывая щель подачи масла в бесштоковую полость, В результате замедляется движение каретки перед врезанием резца 28 в заготовку (на копире предусмотрен такой участок перед обработкой). Если на копире встречает ся уступ, что соответствует переходу резца на больщий диаметр обработки с подрез кой заплечика обрабатываемой детали, то. уп отклоняется назад, развсч)ачивая рыаг, который через толкатель преодолевает силие электромагнита и перемещает золсугик вправо, открывая щель в полость Б олотника, связанную со штоковой полостью илсжого цилиндра, и этим самым отводят каретку назад. При этом образец обрабатывает заплечик детали. Система регулирсжания рабочего электромагнита состоит из резьбовой 1ипильки 33, ввернутой в сердечник 32, и двух гаек 34, которые служат ограничителем перемещения сердечника и позволяют производить точную регулировку усилия прижима щупа к копиру 23. Этим обеоИечивается малый износ и больщая долговечность копира и щупа, а следовательно, стабильность размеров обрабатываемых деталей. Как только закончится обработка детали, командоаппарат дает сигнал на отключение электромагнита, который обесточится и пружина 21 поджатия рычага 17 к толкателю 15 переместит золотник вправо, максимально открывая щель в полость Б золотника, связанную со штоковой полостью гвдроцилиндра, произойдет быетрьй отвод каретки от обрабатываемой детали,. Таким образом, уменьщение габарнтсяа гидрокопировального суппорта сбеспечивает ся расположением золотника управления перед гидроцилиндром в одной с ним гфизснт-альной плоскости, а также упрощенна привода золотника. Кроме , умевыиение габаритов гвдрокрпйр( сунnogra повышает удобство обсоужквания , так как, не заслоняет Cftepavopy зону резания, а упрощение привода золотншса за счет уменьшения количества элементов (пружины и рычага со стороны электромагнита) повышает надежность (если обесточить магнит, суппорт немедленно отойдет в исходное положение и этим самым не допустит поломки резца). Формула изобретения Гидрсжопировальный суппорт к токарно- револьверному автомату, включающий салазки, каретжу с расположенными в ее кор« пусе гидроцилиндром И| золотником управления, кинематически связанным с электромагнитом, отличающийся тем, что, с целью уменьшения габарит и повышения удобства обслуживани51, ги/фе цилиндр и золотник расположены в плоскости ниже горизонтальной плоскости. 11роход5пцей через линию центра шпинделя автомата, при этом электромагнит расположен соосно золотнику и связан с ним не-/посрэддтвенно. Источники информации принятые во внимание при экспертизе. 1. Авторское свидетельство № 248432, кл, В 23 Q 35/18, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическое копировальное устройство | 1980 |
|
SU897473A1 |
| Гидрокопировальный многопроходный суппорт | 1982 |
|
SU1050849A1 |
| Гидрокопировальный привод | 1979 |
|
SU831539A1 |
| Гидрокопировальный станок | 1988 |
|
SU1690949A1 |
| Гидрокопировальный суппорт | 1980 |
|
SU904997A1 |
| Гидрокопировальный многопроходный суппорт | 1981 |
|
SU1134350A1 |
| ГИДРОКОПИРОВАЛЬНАЯ БАБКА | 1971 |
|
SU295612A1 |
| Гидрокопировальное устройство к универсальному токарному станку | 1958 |
|
SU132026A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОНИЧЕСКИХ СОПРЯГАЕМЫХ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2016704C1 |
| Резцедержавка гидрокопировального станка | 1983 |
|
SU1151424A1 |

ОСЬ шпинделя
