(54) АВТОРУЛЕВОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| СУДОВОЙ АВТОРУЛЕВОЙ «СИНИЦА» | 1966 |
|
SU179639A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| АВТОРУЛЕВОЙ | 1962 |
|
SU147104A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
I
Изобретение касается автоматического управления движением судна на курсе.
Известен судовой авторулевой, содержащий задатчик курса и приемник гирокомпаса, кинематически связанные с датчиком. 5 курса, выходы которого соединены соответственно с входами дифференцирующего икатегри рующего блока и блока выработки первой и второй производных, соединенного своим выходом через блок сравнения с блоком вы- 10 работеи стандартных сигналов 1.
В Этом устройстве происходит некоторое улучшение динамических свойств системы управления за счет введения блока вырабо -1б ки стандартных сигналов в режиме стабилизадии судна на курсе. Однако оно не обеспечивает быстрого протекания переходных процессе при выводе судна на новый курс.
Известен также авторулевой, содержа- 20 щий задатчик курса и приемник гирокомпаса, кинематически связанный с датчиком курса, дифференцирующим и интегрирующим блоками, выходыкоторых соединены с
входами суммирующе10 блока следящего 25
лривода руля направления, и кулачково кон гактный механизм 2J.
Недостатком известного устройства является затягивание переходного процесса |при автоматическом выходе судна ра новьгй |курс, т.е. значительное время выхода судна на нсеый, курс, что затрудняет ав.томатическое управление судном в уакостах и местах оживленного судоходства.
Целью изобретения является повыигенае быстродействия авторулевого.
Это достигается тем, что авторуяейсА снабжен трансформатором, первичная обмот ка которого подсоединена к источнику переменного. напряжения а вторичные обмоткн через замыкающие контакты , , кулачковоконтактного механизма подклК1чены к сумь4 рукмцему блоку следящего првовода рупя ка пр№пения, при этом 1купачак купачково-ко тактного механизма кинематически саязан с датчиком курса.
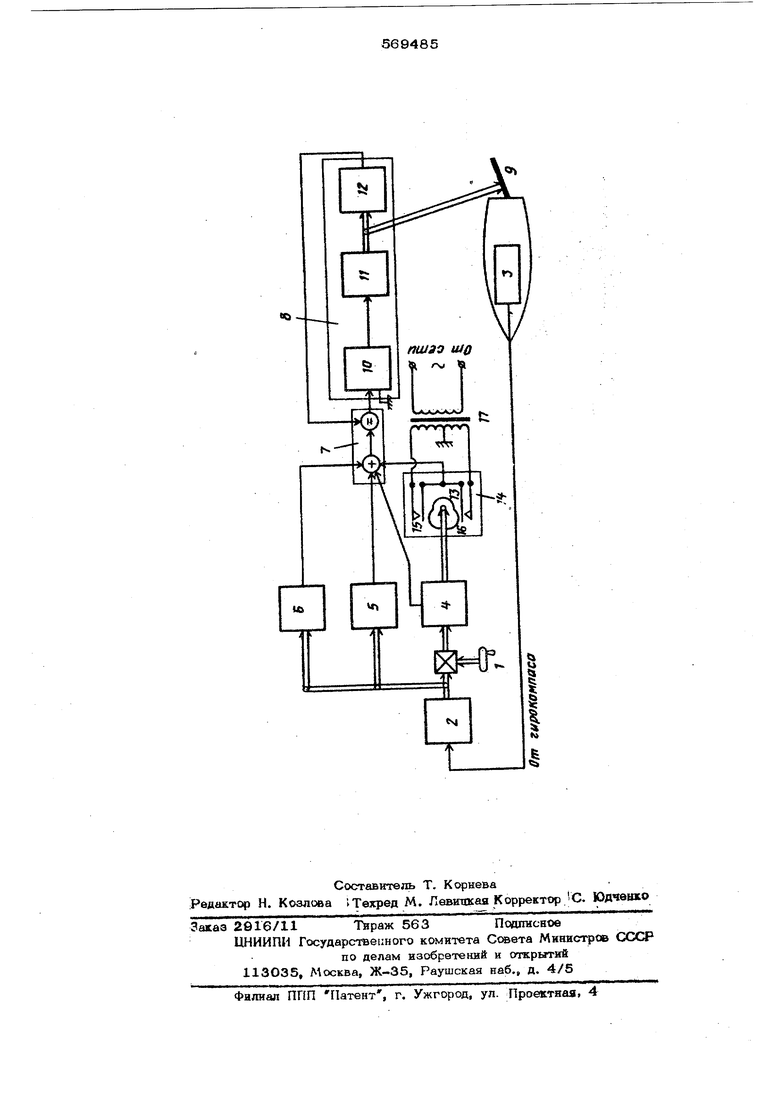
На чертеже псжазана функциональная схв ма авторулевого.
Авторулевой состоит из задатчика 1 кургса и приемника 2 гирокомпаса 3, кинема
тнчески связанных с датчиком 4 курса и диффервнпирукядим 5 .и интегрирующим 6 блоками, выходы которых соедивены с суммирующим бл«жом 7 следящего привода 8 руля 9 направления. Следящий привод 8 включает в себя последовательно соединенные усилитель 10, нспотштельный узел 11, и датчик 12 обратной связи. С датчиком 4 курса йинб- магически связан кулачок 13 кулачков (контактного механлама 14, замыкающие контакты 15 и 16 которого подсоединены к вторичным обмоткам трансформатора 17, а первич- нан обмотка последнего подключена к источнику переменного напряжения, например к сети (на чертеже не показан).
Устройство работает следующим образом.
При появлении рассоглассвания мензду заданным и фактическим углом поворота руля 9 направления, вызванного либо отклонением судна от заданного прямого курса в режиме стабилизации, либо вводом поправки к курсу с помощью задатчика 1, датчик 4 курса разворачивается на угол, пропорциональный этому рассогласс«анию1 Кулачок 13, кинематически связанный с датчиком 4 курса, замыкает контакты 15 и 16 только при развороте датчика 4 курса на угол рассоглассеания 6-10° курюа. Величина этого угла устанавливается в процессе настройки устро;; IBa, в зависимости от динамйческих свойств судна, . ,
При замыкании одногр из контактов 15 или 16 (в зависимости от знака угла рас согласовани$ напряжение с трансформатора 17 подается на вход суммирующего блока 7.следящего привода 8 руля 9 направления. Фаза этого напряжения совпадает с фазой напряжения, снимаемого с датчика 4 курса а величина превышает суммарное напряжение, снимаемое с датчика 4 курса, интегрирующего 6 и дифференцирующего 5 блоков, и обеспечивает перекладку руля 9 на максимальный угол. До тех пор, пока величина рассогласования будет больше 6-10 курса, руль 9 остае тся заложен- ,ным на максимальный угол. Поэтому
начальный участок кривой выхода судна на новый курс протекает с максимальной крутизной.
При приближении судна к новому курсу и соответственном уменьшении угла рассогласоЕкания контакт 15 или 16 размыкается я работа устройства ничем не отличается от работы обычного авторулевого с пропорционально-ичтегрально-дифференциальнымзаконом регулирования.
Предлагаемый авторулевой позволяет обеспечить улучшение качества переходного, процесса при выводе судна на новый курс без ухудшения качества стабилизации судна на прямом курсе.
Формула изобретения
Авторулевой, содержащий задатчик курса и Приемник гирокомпаса,«кинематически связанный с датчиком курса, дифференцирую щим и интегрирующим блоками, выходы которых соединены с входами суммирующего блока следящего привода руля направления, и кулачков 0-контактный механизм, о т л ич а ю щ и и с я тем что, с целью повышения быстродействия, он снабжен трансфор30 матором, первичная обмотка которого подсоединена к источнику переменного напряжения, а вторичные обмотки через замыкающие контакты кулачке 0-контактного механизма подключены к суммирующему
35 блоку следящего привода руля направления, при атом кулачок кулачково-контактного механизма кинематически связан с датчиком курса.
Источники информации, принятые во вни-
40 мание при экспертизе:
06,09.66.
«о
