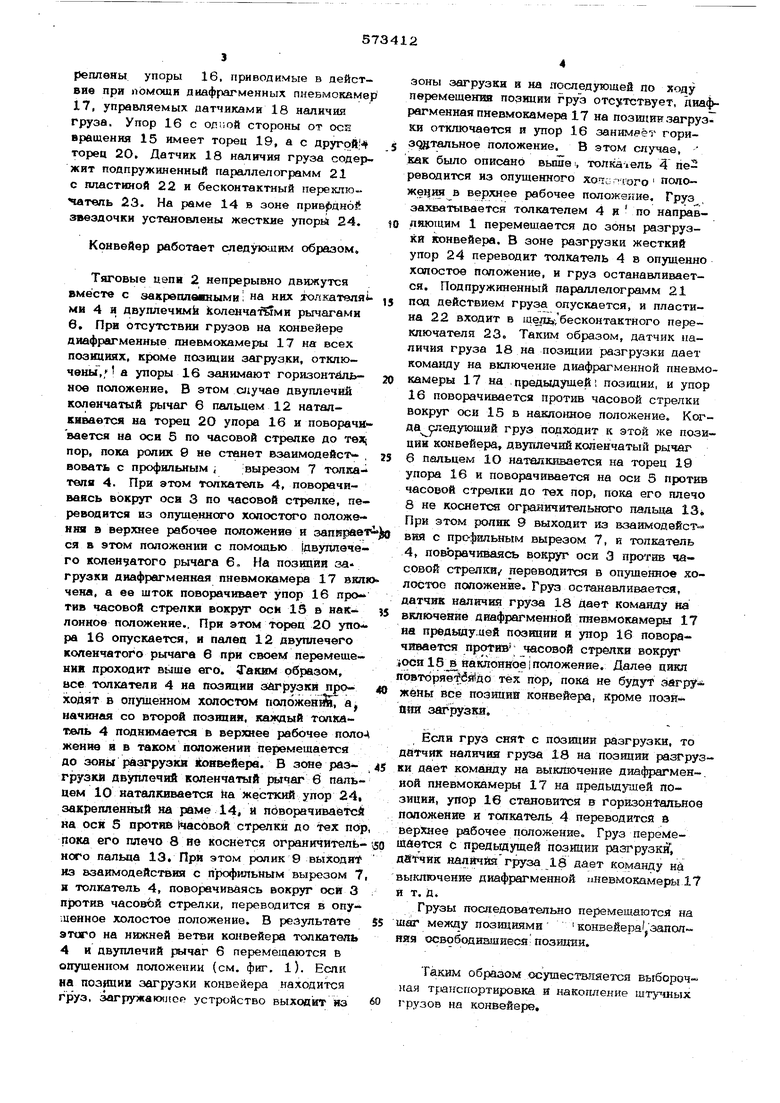
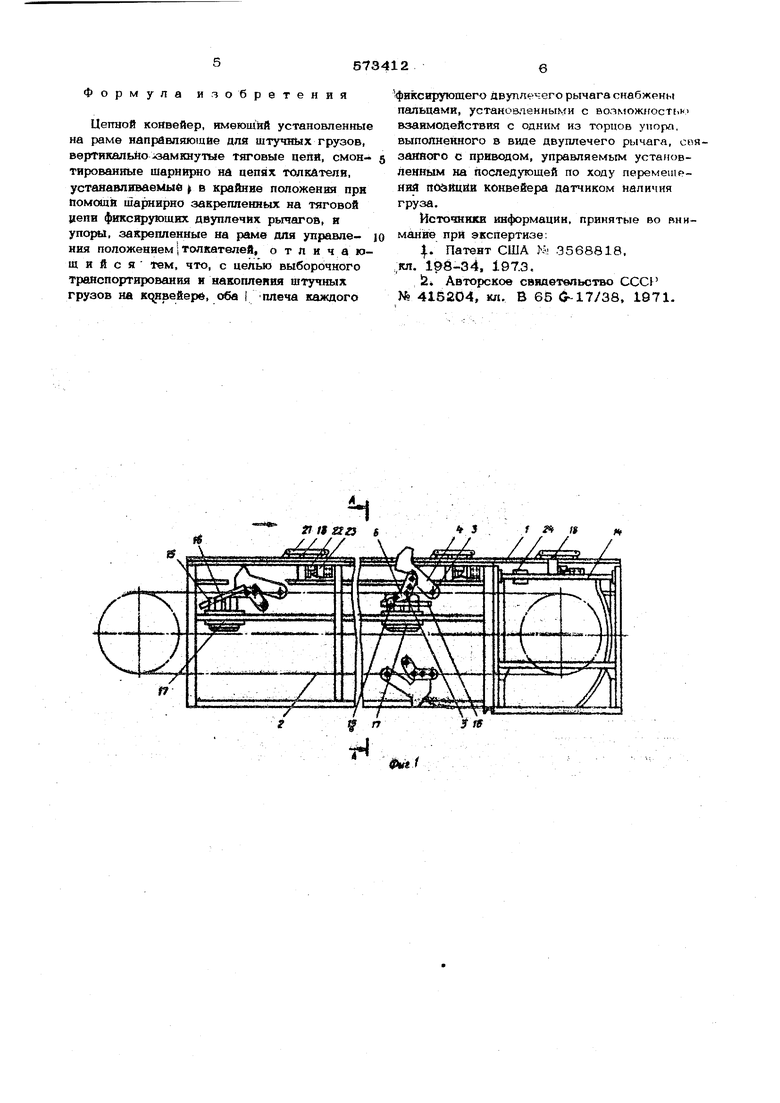
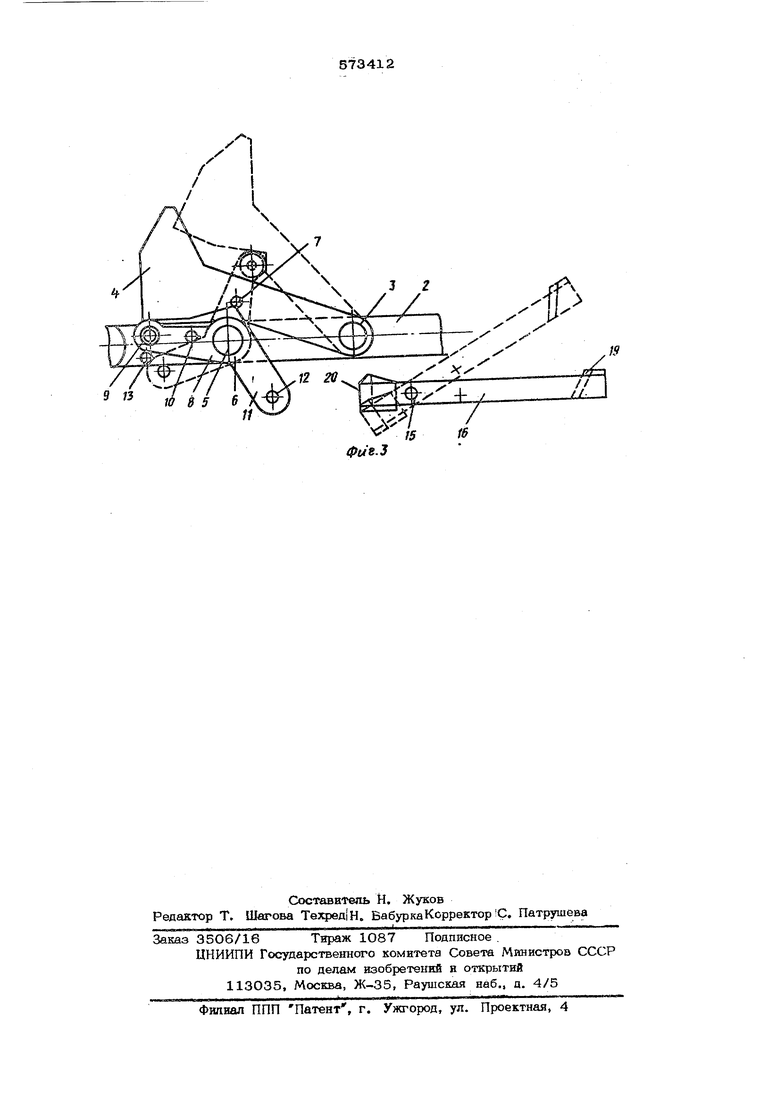
реплеяы упоры 16, приводимые в действие при «омоши диафрагменных пневмокамер 17, управляемых датчиками 18 наличия груза. Упор 16 с олиой стороны от осн вращения 15 имеет торец 19, а с другой|4 торец 20, Датчик 18 наличия груза содер жит подпружиненный параллелограмм 21 с шшстиной 22 и бесконтактный перехлюметель 23. На раме 14 в зоне приводной звездочки установлены жесткие ynopti 24. Конвейер работает следующим образом. Тяговые цепи 2 непрерывно движутся вместе с закреолааными: на них толкателяАми 4 и двуплечими koлeнчafйми рычагами в. При отсутствии грузов на конвейере диафрагменные пневмокамеры 17 на всех позициях, кроме позиции загрузки, отключены,, а упоры 16 занимают горизонтёльнов положение, В этом случав двуплечий коленчатый рычаг 6 пальием 12 наталкивается на торец 20 упора 16 и поворачйвается на оси 5 по часовой стрелке до твя пор, пока ролик 9 не станет взаимодейст- , вовать с профильным ; вырезом 7 Txmscaтела 4. При этом толкатель 4, поворачиваясь вокруг оси 3 по часовой стрелке, переводится из опушенного холостого положения в верхнее рабочее положение и запЕрает ся в этом положении с помошью двуплечего коленчатого рычага 6, На позиций за грузки диафрагменная пневмокамера 17 ВЕЛЮ чека, а ее шток поворачивает упор 16 против часовой стрелки вокруг оси 15 в наклонное положение.. При этом торец 2О упора 16 опускается, и палец 12 двуплечего колеичатого рычага б при своем перемещения проходит выше его. Таквм образом, все толкатели 4 на позиции загрузки проходят в опущенном холостом положен а начиная со второй позиция, каждыЛ толкатель 4 поднимается в верхнее рабочее поло4 женяе и в таком Положении перемешается до зоиы разгрузки конвейера. В зоне раэгрузкй двуплечий коленчатый {ллчаг 6 пальцем 10 наталкивается ka жесткий упор 24, закрепленный на раме 14, я пбворачиваёТсА на оси 5 против часовой стрелки до тех noip пока его плечо 8 не коснется ограничительного пальца 13ф При этом ролик 9 выходив из взаимодействия с профильным вырезом 7 и толкатель 4, поворачиваясь вокруг оси 3 п|Х)тив часовбй стрелки, переводится в опушенное холостое положение. В результате этого на нижней ветви конвейера толкатель 4 и двуплечий рычаг 6 перемешаются в опушенном положении (см. фиг. 1). Если на позипии загрузки конвейера находится груз, загружающее устройство выходит из зоны загрузки н на последуюшей по ходу перемешениа позиции груз отсутствует, диафрагмениая пневмокамера 17 на позшгт загрузГ ки отключается я упор 16 занимает гориз дтальное положение. В этом случае, как было описано выше , толка лель 4 переводится из опущенного xoianroro положении в верхнее рабочее положение. Груз захватывается толкателем 4 и по направляющим 1 перемещается до зоны разгрузки конвейера. В зоне разгрузки жесткий упор 24 переводит толкатель 4 в опушенно холостое положение, и груз останавливается. Подпружиненный параллелограмм 21 под действием груза опускается, и пластина 22 входит в щель-,бесконтактного переключателя 23. Таким образом, датчик наличия груза 18 на позиции разгрузки дает комшвду на включение диафрагменной пневмокамеры 17 на предыдушей 1 позиции, и упор 16 поворачивается против часовой стрелки вокруг оси 15 в наклонное положение. Когда едуюший груз подходит к этой же позиции конвейера, двуплечий коленчатый рычаг 6 пальцем Ю наталкивается на торец 19 упора 16 и поворачивается на оси 5 против часовой стрелки до тех пор, пока его плечо 8 не коснется ограничительного пальца 13 При этом ролик 9 выходит из взаимодействия с профильным вырезом 7, и толкатель 4, поворачиваясь вокруг оси 3 протав часовой стрелки/ переводится в опушенное холостоо положение. Груз останавливается, датчик наличия груза 18 дает команду на вклк чение диафрагменной пневмокамеры 17 на предьщу.яей позиции я упор 16 поворачивается прочий; часовой стрелки вокруг оси 1 б наклонное i гголожеяие. Далее цивм овторявтбгййо тех пор, пока не будут эагру жёны все позиций конвейера, Кроме позиПИЯ загрузки. Если груз снят с позиция разгрузки, то датчик наличия груза 18 на позиций разгрузки дает команду на выключение диафрагмен-, ной пневмокамеры 17 на предьщущей позиции, упор 16 становится в горизонтальное положение и толкатель 4 переводнтсй а верхнее рабочее положение. Груз перемешается С предыдущей позиции разгрузки, датчик наличия груза 18 дает команду ни вы1а1ючение диафрагменной невмокамеры 17 и т. Д Грузы последовательно пе|5емещаются на шаг между позициями конвейетаузапол яяя освободиашиеся позшши. Таким образом осушест&пяется выбороч- пая транспортировка и накопление штучных грузов на конвейере.
Формула изобретения
Цепной конвейер, имеющий установленные на раме направляющие для штучных грузов, вертикальйс замкнупые тяговые цейЯ, смонтированяые шарнйртго на цепях толкатели, устанавливаемый в крайние положения при помсядй шарнирно закрепленных на тяговой лепи фиксирующих двуплечих рычагов, и упоры, закрепленные на раме для улравлення положением 1 толкателей, о т л и ч а ющ и и с я тем, что, с целью выборочного транспортирования н накопления штучных грузов на к нвейерб, оба I плеча каждого
фнксирутошего juaynneHero рычага снабжены пальцами, установленными с возмо«а{осТ.к взаимодействия с одним из торнов упора, выполненного в виде двуплечего рычага, свзанного с приводом, управляемьм установленным на последующей по ходу перемещрН1Ы пй зйцйв конвейера датчиком наличия груза.
Источникв информации, принятые во внимание при экспертизе;
:|.. Патент США М: 3568818, ,кл. 108-34, 197.3.
2 Авторское свидетельство СССР № 415204, кл, В 65 6 17/38, 1871.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цепной конвейер | 1982 |
|
SU1016238A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для перезарядки цилиндрических вулканизаторов | 1969 |
|
SU438549A1 |
| Накопительный конвейер штучных грузов | 1989 |
|
SU1676958A1 |
| Регулятор частоты вращения дизеля | 1989 |
|
SU1668715A1 |
| ПОДВЕСНОЙ ШТАНГОВЫЙ ТОЛКАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU246380A1 |
| Автоматическая линия для балансировки коленчатых валов | 1984 |
|
SU1221520A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |
| Тележечный конвейер | 1985 |
|
SU1276577A2 |
nЛ
N
v.
ft
.|
J У11
N
3
J9
фие.З
