1
Иэобретеиие относится к автома нке и вычислительной технике, в частности к системам nporpai(Horo управления электроэрозиоиными устан жка1«и ,дп.я обработки иепрофялирсфаншт электродом деталей сложной конфигурации.
Известны системы цифрового програм много управления электроэрозиоиным Ьтанком, содержащие генератор, подключённый к электроду и обрабатьюаемой детали, датчик величины электроарозионного промежутка, подсоединенный к электроду и детали, и коммутатор, соединенный с исполнительными шаговыми двигателями.
Недостатком таких систем является низкая точность их работы и недоста точная помехоустойчивость.
Цель изобретения - повышение точности и увеличение помехоустойчивости устройства. Достигается тем, что система содержит посЛ овательно соединенные преобразователь ;напряжения в частоту, частотно-1вр«менной преобразователь, блок определения направления и скорости переме цения обрабатываемой детали и цифровую управляющую маишну,связанную с коммутатором, причем датчик величины
2
лект1 Ьэроэионного промежутка соедичен 00 входом преО1%1азователя напрвйеявя 9 частоту, а преобразователь йапряжевия а частоту выполнен т виде реверсявяого электродвигателя.
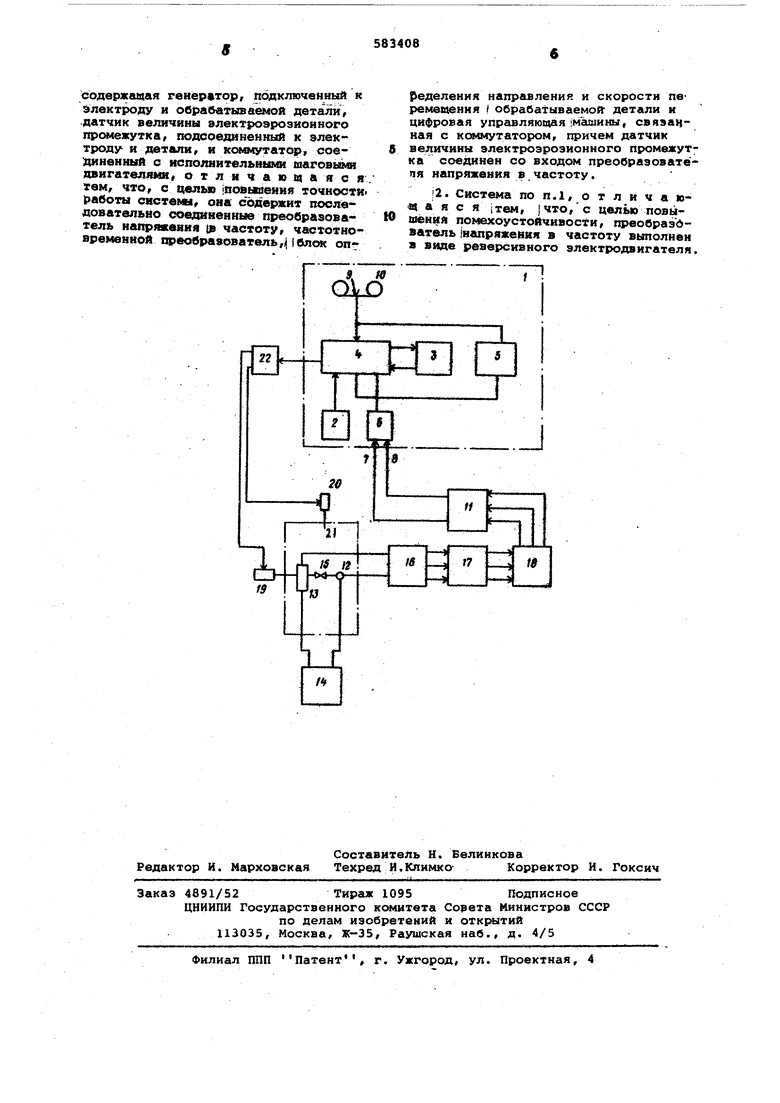
На изображена структурная Системы.
Система оодержит цифровую упрааляюцум чювалну I, включагацую клавиатуру 2, оперативное 8апо инаюцве устройство 3, процессор 4, постоянное isanoMoiHaimee устройство 5, устройство ввода € со ВХОДШ4И 7 и 8 и магнитную леяту 9 протягиваемую itexaнизьгом 10, &ЛОК 11 {Определения направления я скорости пергачецеаня обра батываемой детали, электрод 12 и ООраба-пшаемую деталь 13, подключент4е к генератору 14 напряжения и обеспечив€ш«ие наличие электроэрозиониого промежутка 15, датчик 16 величины электроэрозионного прс южутка, преобразователь 7 напряжения в частоту, частотно-временной |Преобразователь 18, исполнительные шаговые двигатели 19 и 20, осуществляющие перемещение координатного стола 21 с закрепленной на нем обрабатываемой деталью 13, и коммутатор 22.
Система работает следующим образом.
Управляющая программа обрабатьшаемого контура записывается в оперативное запоминающее устройство 3 S цифровой управляющей машины 1 с помощью процессора 4 с клавиатуры 2 или с магнитной ленты 9, протяги ваемой механиз1 4ом 10.
После записи программы система SO обеспечивает бесп@р ебойную работу коьалутаюра 22 шаговык даигатв лей 19 и 20, которые пврет«еща1зт кй«5р динатт стол 21 s соотаетствии с заданной програьшой. Работа цифровой 15 управляющей маьзиаы i проасходм в соответствии с «шкропрогр айамк, эа писанньг ш g ее достоянной запомамающем устройсгае 5, коо днннрук ш еы работу систеьш, обеспечива- 20 ется работа в режяизе ланейно-круго- вого HHTepnonH-poipa f автоматический расчет эквиздиетаатного контура л возврат по траекторий назад,
При нзменеини величины электроэро Ш знойного промежутка 15 необходаи о мз менять скорость подачи шаговшс явига телей 19 н 20 прн перш етеннк координатного стол§. 21 е тем, чтобы велнЩг1а алектроврозионного промежутка между ю электродсш 12 н деталью 13 восстановилась до первоначальной.
ДопуЪтйм произсжшо уменьшение вв личины электроэроэионного прсадежут- ка 15, генератор 14 вырабативает gg импульсы оиределеийой длительности и амштчу№Я( и при уменьшении велй чины эдектроэроэионного , напряжение, снймаемае с него надат- . . чик 16 величины электроэроэкоаного «« промежутка, уменьшите, в результат© чего уменьшится и напряжение на его В1гходе.,
В преобразователе 17 напряжения в частоту произойдет пропорциональное. уменьшение частоты аыходного сйгнала, причем выходным параметром быть, например, и скорость вршдейия вала электродвигателя, используемого в качестве преобразователя налряжения в частоту., Выходной параметр преобразователя 17 напряжения в частоту преобразуется в частотно-временном преобразователе 18 в электрические импульсы с переменной частотой, следуюище по SS трем каналам и сдвинутые во времени друг относительно друга, что необхо™ димо для определения направления вращения вала реверсивного электродвигателя в преобразователе 17 на- Ш пряжения в частоту.
При зтом частота импульсов, следующих по каждому из каналов, в рассматриваемом случае уменьшается. Эти сигналы поступают на блок 11 оп- §g
ределения напряжения и скорости перемещения обрабатываемой детали, где происходит выделение сигнала направления, поступающего по входу 8 в ус1тройство ввода б цифровой управляющей машины 1 и смешивание сигналов беременной частоты, приходящих по трем каналам в сигиал, частота котс юго уменьшается . и поступает по входу 7в устройство ввода 6.
бри этом с приходом каддого импульоа по входу 7 цифровая управляющая машина 1 вщэабатывает сл,бУ1(ЯФий ,шзг ущ}агля%)щвй щюгремкш, причем с уменыйемнвм частоты J; следования импульсов ио эколу 7 частота сигналов управления приходщих яа комьгутатор 22 шаговых 1 и 20 уменьшается. , ,,.....
Нри уменьшается скорость перемеЕ ийя координатного стола 21, а, соответственно, и электрода 12 относи ельно детали 13, в результате чего аелйчина электроэрозионного промвжурка ..восстанавливается до первоначальной.
Аналогично происходит слеясенне 33. величиной электрозрбзионного промежутка в случае возрастания его величины. При возинкиогевни короткого зш«1кания между электроде 12 и деталью 13 с датчика 16; гелнчйгсш алектроэроанойного промежутка поступает управля еяцее напряжение, велнчява црторого ($еньше заданной критической веявчины равной критя еской 1|ШНШ11вльи0й аеличинг 9л@кгроэ| озяомного промежутка. йри этом гдзеобразоввтеяь 17 нагфяже8ия э частоту осу1 с:твяявт вьщачу csirHanoB по трем каналам s другой последовательности, противоположной той, которая соответствовала рассмотренному выше pexKvsy слежения за величиной электрозрозионного прс лежутка 15.
В частотно-временном преобразователе 18 происходит временной сдвиг обратной последовательности приходящих сигналов но трем каналам, и а блоке 11 определения направление и скорости перемещения обрабат1 аемой детали формируется сигнал реверса по входу 8, в результате чего цифровая управляющая машина 1 осуществляет выдачу програкввл в ,обратной последовательности: до исчезновения короткого замыкания, после чего отсутствие сигнсша по входу 8 ведет к тому, что происходит возврат злектрода в точку отвода, и затем продолжается обработка программы в прямом направлении.
Формула изобретения 1. Система цифрового nporpaMjvffloro {.правления злектроэрозионньм станком,
содержащая генератор, подключвнйый к длектроду и обрабатываемой детали .датчик величины электроэрозионного прсмежутка, подсоединенный к электроду и детали, и коквиутатсчр, соединенный с исполнительными шаговшв двигателями, о т л и ч а ю ц а я с я тем что, с целыо {оовшения точности работы системы, она сЬдержит последовательно сое шменные преобразователь напряжения частоту, частотновреиенйой преобразователь,) определения направления и скорости переме111ення ( обрабатываемой- детали и цифровая управляющая машины, связанная с ксммутатором, причем датчик величины электроэроэионного промежутка соединен со входом преобраэоватепя напряжения в частоту.
12. Система по п. 1, о т л и ч а ю« а я с я |тем, )что,с целью повышеиия помехоустойчивости, преобраэбватель напряжения в частоту выполнен в виде реверсивного электродвигателя,
| название | год | авторы | номер документа |
|---|---|---|---|
| Система числового программногоупРАВлЕНия элЕКТРОэРОзиОННыМ CTAHKOM | 1979 |
|
SU798723A1 |
| Установка для электроэрозионного легирования | 1987 |
|
SU1549685A1 |
| Устройство для электроискрового вырезаниящЕлЕй | 1979 |
|
SU837709A1 |
| Устройство для электроэрозионного легирования | 1988 |
|
SU1664486A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБРАБОТКИ ДЕТАЛИ НА ЭЛЕКТРОЭРОЗИОННОМ ВЫРЕЗНОМ СТАНКЕ | 2014 |
|
RU2596934C2 |
| ЭЛЕКТРОИСКРОВАЯ УСТАНОВКА С ПРОГРАММНЫМ | 1965 |
|
SU176174A1 |
| Программноуправляемый электроэрозионный станок | 1978 |
|
SU751548A1 |
| Станок для электроэрозионной обработки проволочным электродом-инструментом | 1981 |
|
SU1068248A1 |
| УСТРОЙСТВО ЦИФРОВОЙ ИНДИКАЦИИ (УЦИ) ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОЭРОЗИОННОЙ СУПЕРДРЕЛЬЮ ДЛЯ СВЕРЛЕНИЯ ПРЕЦИЗИОННЫХ ТОНКИХ И ГЛУБОКИХ ОТВЕРСТИЙ | 2015 |
|
RU2603395C1 |
| Способ электроискрового нанесения покрытий и устройство для его осуществления | 2020 |
|
RU2740936C1 |
