(54) УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ СТЕЛЛАЖЕЙ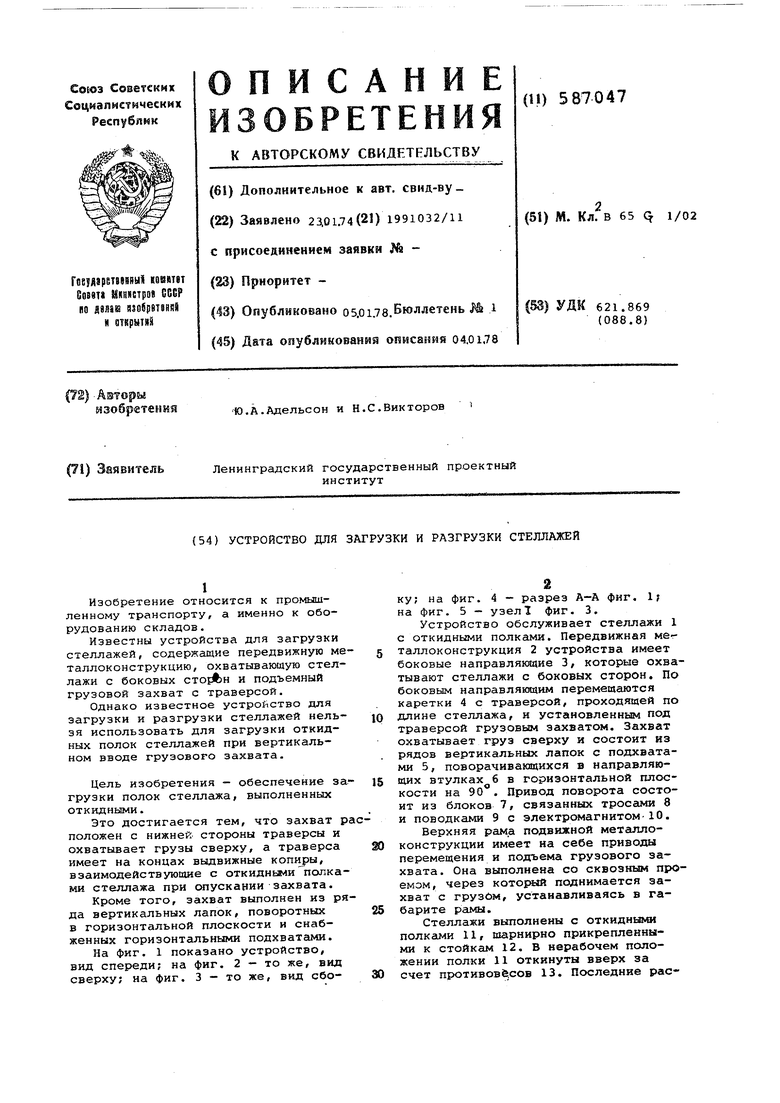
1
Изобретение относится к промышленному транспорту, а именно к оборудованию складов.
Известны устройства для загрузки стеллажей, содержащие передвижную ме таллоконструкцию, охватывающую стеллажи с боковых сторЛн и подъемный грузовой захват с траверсой.
Однако известное устройство для загрузки и разгрузки стеллажей нельзя использовать для загрузки откидных полок стеллажей при вертикальном вводе грузового захвата.
Цель изобретения - обеспечение за грузки полок стеллажа, выполненных откидными.
Это достигается тем, что захват рположен с нижней стороны траверсы и охватьлвает грузы сверху, а траверса имеет на концах выдвижные копиры, взаимодействующие с откидньми полками стеллажа при опускании захвата.
Кроме того, захват выполнен из ряда вертикальных лапок, поворотных в горизонтальной плоскости и снабженных горизонтальными подхватами.
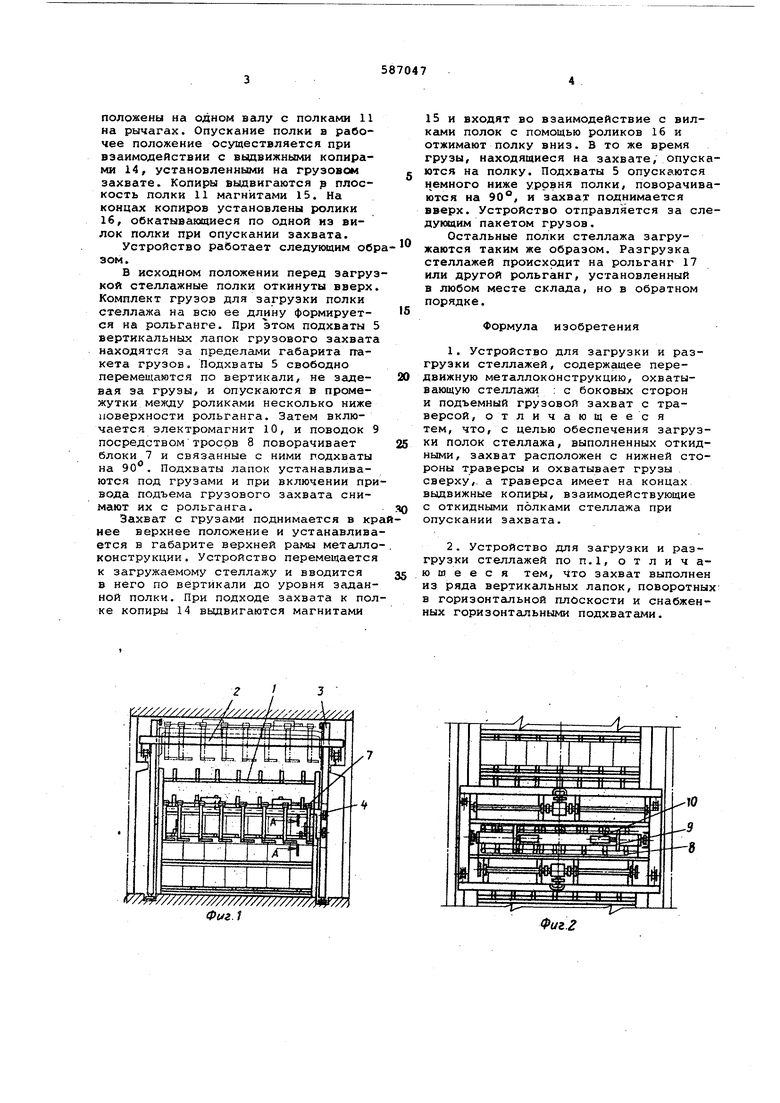
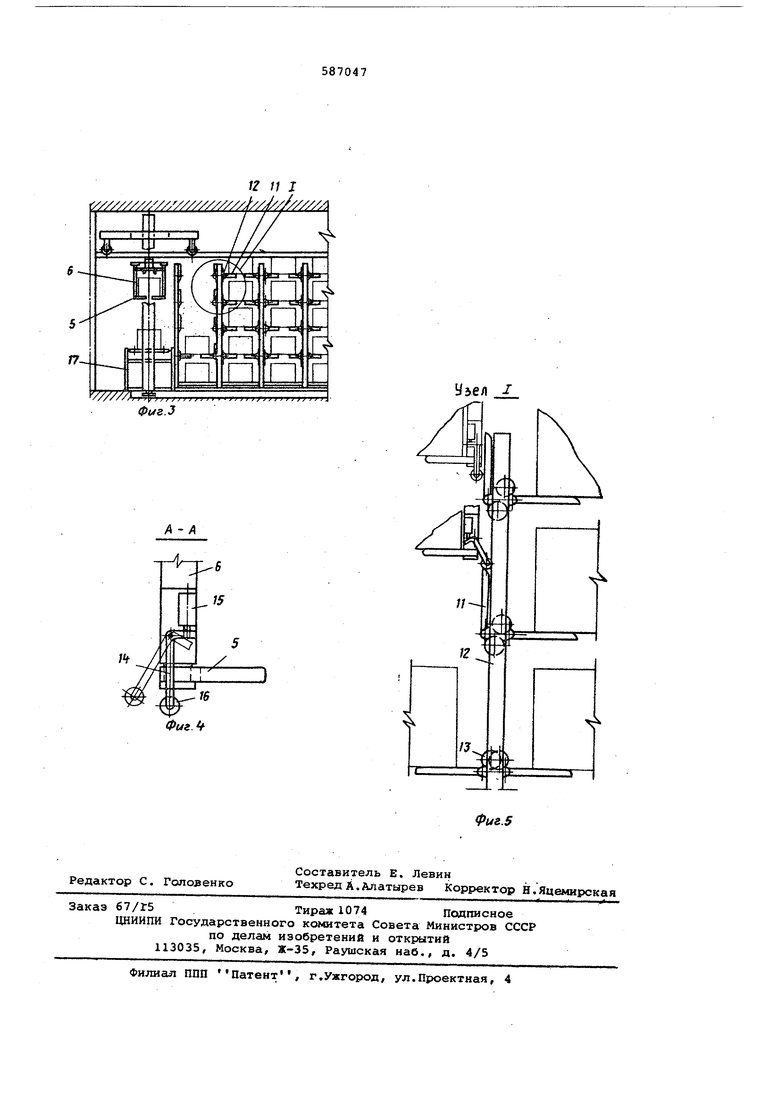
На фиг. 1 показано устройство, вид спереди; на фиг. 2 - то же, вид сверху; иа фиг. 3 - то же, вид сбоку; на фиг. 4 - разрез А-А фиг. 1; на фиг. 5 - узел фиг. 3.
Устройство обслуживает стеллажи 1 с откидными полками. Передвижная мвгталлоконструкция 2 устройства имеет боковые направляквдие 3, которые охватывают стеллажи с боковых сторон. По боковым направляквдим перемещаются каретки 4 с траверсой, проходящей по длине стеллажа, и установленным под траверсой грузовым захватом. Захват охватывает груз сверху и состоит из рядов вертикальных лапок с подхватами 5, поворачивающихся в направляю1ДИХ втулках 6 в горизонтальной плоскости на 90 . Привод поворота состоит из блоков 7, связанных тросами 8 и поводками 9 с электромагнитом-10.
Верхняя рама подвижной метгшлоконструкции имеет на себе приводы перемещения и подъема грузового захвата. Она выполнена со сквозным проемом, через который поднимается захват с грузом, устанавливаясь в габарите рамы.
Стеллажи выполнены с откиднылщ полками 11, шарнирно прикрепленными к стойкам 12. В нерабочем положении полки 11 откинуты вверх за счет противовё.сов 13. Последние расположены на одном валу с полками 11 на рычагах. Опускание полки в рабочее положение осуществляется при взаимодействии с выдвижными копирами 14, установленными на грузовом захвате. Копиры выдвигаются р плоскость полки 11 магнитами 15. На концах копиров установлены ролики 16, обкатывакнциеся по одной из вилок полки при опускании захвата. Устройство работает следующим обр В исходном положении перед загруз кой стеллажные полки откинуты вверх Комплект грузов для загрузки полки стеллажа на всю ее длину формируется на рольганге. При этом подхваты 5 вертикальных лапок грузового захвата находятся за пределами габарита п-акета грузов. Подхваты 5 свободно перемещаются по вертикали, не задевая за грузы, и опускаются в промежутки между роликами несколько ниже поверхности рольганга. Затем включается электромагнит Ю, и поводок посредством тросов 8 поворачивает блоки 7 и связанные с ними подхваты на ЭО. Подхваты лапок устанавливаются под грузами и при включении пр вода подъема грузового захвата снимают их с рольганга. Захват с грузами поднимается в к нее верхнее положение и устанавлив ется в габарите верхней рамы металл конструкции. Устройство перемещаетс к загружаемому стеллажу и вводится в него по вертикали до уровня задан ной полки. При подходе захвата к по ке копиры 14 выдвигаются магнитами 15 и входят во взаимодействие с вилками полок с помощью роликов 16 и отжимают полку вниз. В то же время грузы, находящиеся на захвате, опускаются на полку. Подхваты 5 опускаются немного ниже уровня полки, поворачиваются на 90, и захват поднимается вверх. Устройство отправляется за следуивдим пакетом грузов. Остальные полки стеллажа загружаются таким же образом. Разгрузка стеллажей происходит на рольганг 17 или другой рольганг, установленный в любом месте склада, но в обратном порядке. Формула изобретения 1.Устройство для загрузки и разгрузки стеллажей, содержащее передвижную металлоконструкцию, охватывающую стеллажи : с боковых сторон и подъемный грузовой захват с траверсой, отличающееся тем, что, с целью обеспечения загрузки полок стеллажа, выполненных откидными, захват расположен с нижней стороны траверсы и охватывает грузы сверху,, а траверса имеет на концах выдвижные копиры, взаимодействующие с откидными полками стеллажа при опускании захвата. 2.Устройство для загрузки и разгрузки стеллажей по п.1, отличающееся тем, что захват выполнен из ряда вертикальных лапок, поворотных в горизонтальной плоскости и снабженных горизонтальными подхватами.
г 3
J/////A///////X/7/A
(/////////////Л
W} ////////////////////////////. Фиг.1
Фиг.2
/f // I
////////////////////////J// // /////A
Фиг.З
A- A
Узел I
