(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПАКЕТОВ ДЛИННОМЕР{{ЫХ
МАТЕРИАЛОВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Крановый захват-кантователь | 1976 |
|
SU704883A1 |
| Грузозахватное устройство | 1980 |
|
SU931651A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Захватное устройство для изделий с петлями | 1981 |
|
SU1096189A1 |
| Грузозахватное устройство для грузов с цапфами | 1975 |
|
SU623808A1 |
| Грузозахватное устройство | 1981 |
|
SU971774A1 |
| Крановое автоматическое захватное устройство для перегрузки металлических труб | 1991 |
|
SU1787923A1 |
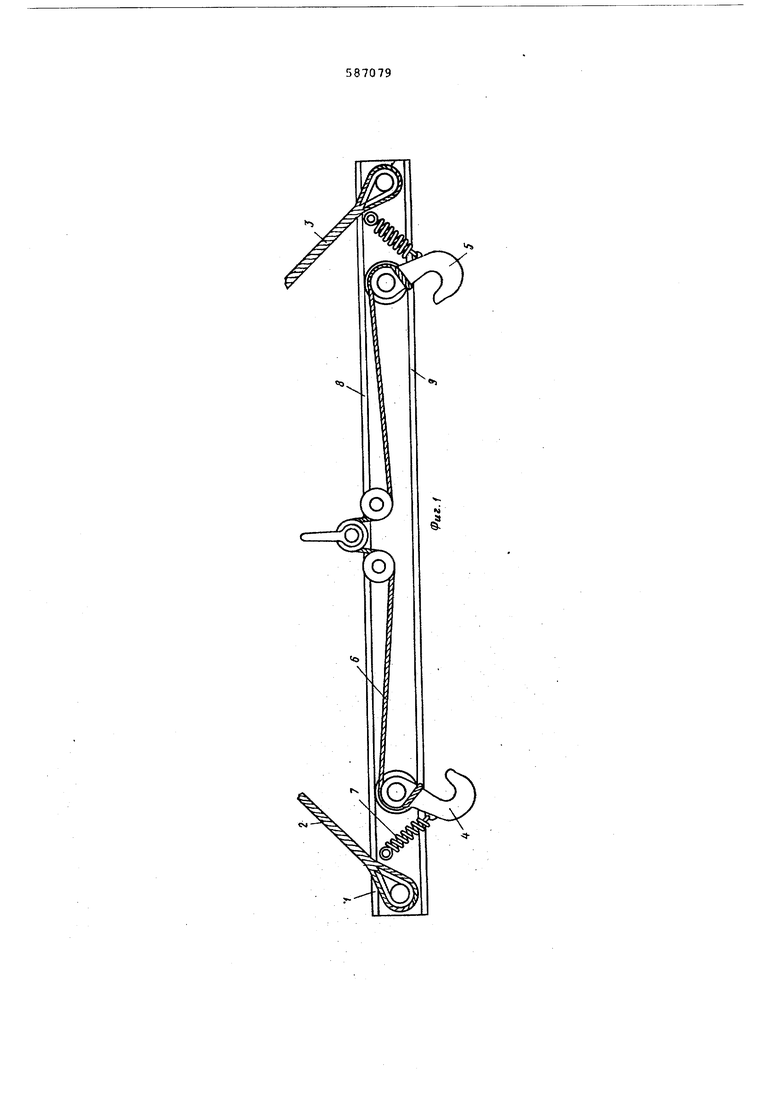

Изобретение относится к грузозахват ным устройствам и может быть использовано в пунктах перевалки пакетов. Известны грузозахватные устройства для транспортировки металлических форм содержащие траверсу с подвижными в горизонтальном направлении захватами, попарно соединенньдми между собой канатами, запрессованными на два полиспаста l . По эти устройства имеют ограниченный ход захватных крюков, обусловленный длиной механизма фиксации, слож ную систему привода захватов, которая увеличивает продолжительность цикла за цепки и отцепки. Жесткое закрепление захватов не обеспечивает зацепку груза за гибкие обвязки, плотно охватываю щие пакет длинномерных материалов. Известно также грузозахватное устройство .для пакетов длинномерных материалов, управляемое канатами двухбарабанной лебедки и содержащее полую коробчатую траверсу, подвешенную па поддерживающих канатах лебедки и несущую захватные органы, соединенные между собой замыкающим канатом лебедки 2 , Однако указанные устройства не могут обеспечить автоматический захват и отцеп пакетов из длинномерных материалов, обвязанных гибкими стропконтейнерами . Цель изобретения - обеспечение автоматизации процесса захвата пакета материалов и его освобождение. Это -достигается тем, что каж;.шй захватный орган выполнен в виде подпружиненного крюка, установленного внутри траверсы с возможностью перемещения вдоль нее и поворота в вертикальной плоскости. Па фиг. 1 изобрах ено описываемое устройство, в разрезе на фиг. 2 устройство в момент захвата пакета. Грузозахватное устройство содержит полую коробчатую траверсу 1, подвешенную на подвдерживающих канатах 2 и 3 лебедки (не показана) и несущую захватные органы, выполненные в виде крюков 4 и 5, соединенных замыкающим канатом 6 лебедки. Каждый крюк снабжен возвратной пружиной 7 и установлен с возможностью перемещения по направляющим 8 и 9 внутри траверсы. принцип действия устройства заключается в следующем. Захватное устройство навешивается на поддерживающие канаты, надеваемые
на крюк крана (не показан). Канат б крепится к двум крюкам. Устройство затем опускается на пакет с таким расчетом, чтобы крюки 4 и 5 были с наружной стороны от стропконтейнеров При включении лебед, служащей для подъема замыкающего каната, крюки перемецаются по направляющим траверсы навстречу друг другу. В связи с тем, что возвратная пружина 7 противодействуёт движению кр4оков, они поворачиваются в горизонтальное положение. После захвата кроками обоих стропконтейнеров включается барабан
подъема поддержи в канатов.
---.; -;
Пакет, задегкиенйый за стропконтейнеры захватом, поднйьм ётся краном с помощью поддержнэваюййх и эа 4лкающего канатов . После укладки пакета, захват висит на поддерживающих канатах, замыкаюций канат ослабляется,, и крюки с помощью пружин возвращают ся в исходное положение.
Формула изобретения
Грузозахватное устройство для пакетов длинномерных материалов, управляемое канатами двухбарабанной и содержащее полую коробчатую траверсу, подвешенную на поддерживающих канатах лебедки и несущую захватные органы, соединенные между собой замыкаюодам канатом лебедки, р т л и ч а то и е 6 с я тем, что, с целью автоматизациипроцесса захвата пакета материалов и :ёго «освобождения, Кс1ждый захватный орган выполнен в виде подпружиненного крика, установленного . гнутри траверсы с возможностью перемещения вдоль нее и поворота в вepтикaльнoй плоскости.
Источники информации, принятые во внимание/при sfccnepTHae; 1. Авторское свидетельство СССР 256968, кл. В 66 С 1/48, 1967.
«г. 2
