(54) УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ И ПОДАЧИ ЛИСТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический комплекс для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1551451A1 |
| Устройство для отделения полосы от стопы и подачи ее к обрабатывающей машине | 1984 |
|
SU1224066A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее к прессу | 1983 |
|
SU1117106A1 |
| Установка для многономенклатурной штамповки полосового материала | 1989 |
|
SU1682019A1 |
| Листогибочное устройство | 1979 |
|
SU841737A1 |
| Устройство для отломки листов стекла | 1975 |
|
SU551267A1 |
| Устройство для отделения верхне-гО лиСТА OT СТОпы и пЕРЕМЕщЕНия ЕгОВ пОдАющиЕ ВАлКи | 1979 |
|
SU852418A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU867481A1 |
| ЛИНИЯ ДЛЯ ТРАНСПОРТИРОВКИ ЛУЩЕНОГО ШПОНА, РУБКИ И УКЛАДКИ ЛИСТОВ В СТОПУ | 2007 |
|
RU2348516C1 |
Изобретение относится к области автоматизации вспомогательных процессов штамповки деталей из листовых заготовок и может быть использовано для поштучного отделения листов от пачки и передачи их на обработку.
Известно устройство для отделения и подачи листов, содержаш.ее смонтированные на неподвижном столе контейнер с пачкой листов, подвижный в вертикальной плоскости от приводного вала блок с вакуумными захватами и подаюш,ие валки, один из которых прижимной 1.
В известном устройстве не исключена возможность захвата двух и более листов, т. е. оно недостаточно надежно в работе.
Устройство по изобретению свободно от отмеченного недостатка благодаря тому, что оно снабжено установленными на приводном валу и подпружиненными к нему рычагами, смонтированными на рычагах дополнительными вакуумными захватами, периодически контактируюшими с отделяемым листом снизу с усилием меньшим, чем усилие основных захватов, закрепленными на столе съемными вертикальными направляЮш,ими, ограничивающими пачку листов по бокам и имеюш,ими высоту, равную длине перемещения блока, а также силовым цилиндром и поворотным от него несущим прижимнои валок рычагом, отводи.мы.м при перемещении блока к пачке листов.
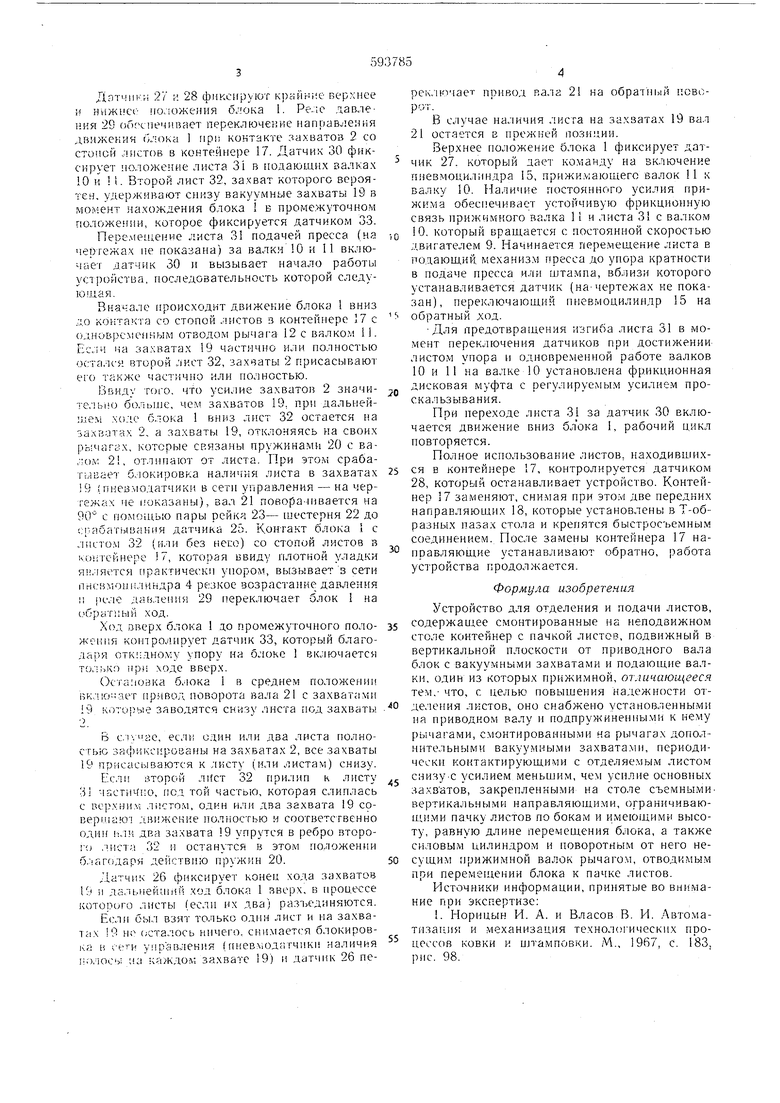
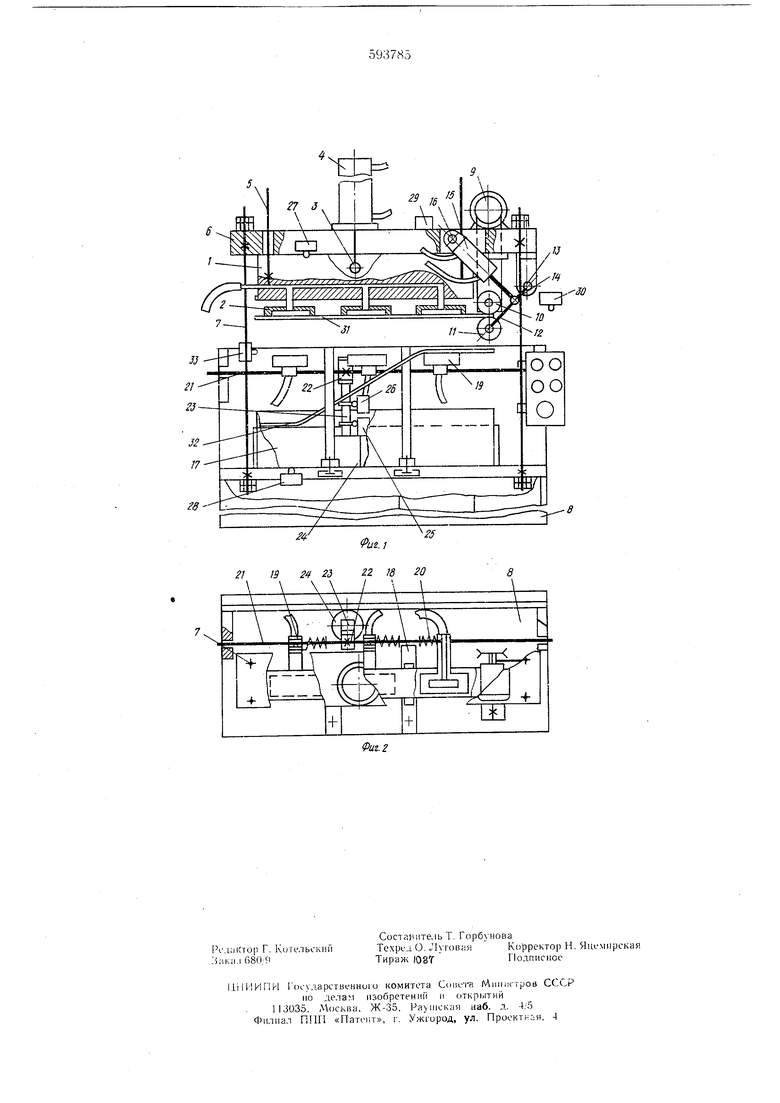
На фиг. 1 схематически изображено предлагаемое устройство для отделения и подачи листов, общий вид; на фиг. 2 -- то же, вид сверху.
Блок 1 с вакуумными захватами 2 связан через ось 3 с пневмоцилиндром 4 и установлен подвижно на колонках 5.
Цилиндр 4 закреплен на траверсе 6, которая связана колонками 7 с корпусом 8 устройства. На траверсе 6 помещен двигатель 9, связанный гибкой связью с подающим валком 10. Прижимной валок 11 установлен на рычаге 12, который имеет ось вращения 13. Рычаг 12 связан через ось 14 с пневмоцилиндром 15, установленным на оси 16.
Контейнер 17 с пачкой листов помещен на столе корпуса 8 и ограничен с боков нередвижными направляющими 18.
Нижние вакуумные захваты 19 установлены на рычагах, которые связаны пружинами 20 с валом 21, помещенным в опоры корпуса 8. На валу 21 закреплена щестерня 22, связанная с рейкой 23 пневмоцилиндра 24, длину хода которого задают датчики 25 и 26.
Все вакуумные захваты связаны гибкими шлангами с насосом (на чертежах не показан).
Датчики 27 ;; 28 фиксируют крайние верхнее и нижнее ио.ложения блока 1. Ре.:;с давления 29 оГкчиечииает переключение направления движения блока 1 ripii контакте захватов 2 ео етопой листов в контейнере 17. Датчик 30 фикеирует наложение листа 31 в подающих валках 0 к 1. Второй лист 32, захват которого вероятен, удерживают енкзу вакуумные захваты 19 в момент нахождения блока 1 в промежуточном положении, которое фиксируется датчиком 33.
Перемещение листа 31 подачей пресса (на чертежах не показана) за валки О и II включает датчик 30 и вызывает начало работы устройства, последовательность которой следующая.
Вначале ироисходит движение блока 1 вниз .ао контакта со стопой листов з контейнере 17 с одноврс.епным отводом рычага 12 с валком 11. Ес,лч на захватах 19 частично или полностью остался второй лист 32, 2 присасывают его также частично или полностью.
1)Вид. того, что усилие захватов 2 значите, больн)с, чем захватов 19. при дальнейшем ходе блока 1 вниз лист 32 остается на захватах 2, а захваты 19, отклоняясь на своих рычагах, которые связаны пру.жинами 20 с валом 21, отлипают от листа. При этом срабагывает 5,1окировка наличия листа в захватах 9 Iпневлюдатчики в сетп управления - на чергежах не показаны), вал 21 поворачивается на 90 с помощью пары рейка 23- шестерня 22 до смКЮатывання датчика 25. Контакт блока i с листом 32 (или без нею) со стопой листов в контейнере 7, которая ввиду плотной уладки янляется практически уиором, вызывает з сети пнсвмон1;.1индра 4 резкое возрастание давления 1 ie;ie д.авлеиия 29 переключает блок 1 на сбрытпый ход.
Ход гзверх блока 1 до промежуточного положения контролирует датчик 33, который благодаря отк:;дно.му упору на блоке 1 включается только при ходе вверх.
Остановка блока 1 в среднем положени вклю-;ает привод поворота вала 21 с захватами
19 которые заводятся снизу листа под захваты
В с.ае, если один или два листа полностью Зг1ф ксир01заны на зах.Батах 2, все захваты 19 присасываются к листу (или листам) снизу.
Ес.И йтарой лист 32 Г1ри„тип к листу 31 частично, под той частью, которая слиплась с верхниу, лпсто.м, один или два захвата 19 совер1на.ю движение полностью и соответственно одни .два захвата 19 упрутся в ребро второго . 32 и останутся в этом положении б. агодаря действию пружин 20.
Датчик 26 фиксирует коней хода захватов 19 я дальнеЙ1Н: Й ход блока 1 вверх, в нроцессе которого листы (если их два) разп единяются.
Если был взят только один лист и па захватах 9 но (;сталось ннчего. снимается блокиров1ча в сети упргивления (пневмодатчикп наличия по/юсь; ;ui каждом захвате 19) и датчик 26 пе4вала 21
на обратный поворек.тьочает прнвод рот.
В случае наличия листа на захватах 19 вал 21 остается в прежней позиции.
Верхнее положение блока 1 фиксирует датчик 27. который даст команду на включение пневмоцилиндра 15, прижи.мающего валок 11 к валку 10. Наличие постоянного усилия прижима обеспечивает устойчивую фрикционную связь прижимного валка 11 и листа 31 с валком 10. который вращается с постоянной скоростью двигателе.м 9. Начинается пере.мещение листа в подающий механизм прееса до упора кратности в подаче пресса или штампа, вблизи которого устанавливается датчик (на-чертежах не показан), переключающий иневмоцилиндр 15 на обратный ход.
-Для предотвращения изгиба листа 31 в мо.мент переключения датчиков при достижении листом упора и одновременной работе валков 10 и 11 на валке 10 установлена фрикционная дисковая муфта с регулируемым усилие.м проскальзывания.
При переходе листа 31 за датчик 30 включаетея движение вииз блока 1, рабочий цикл повторяется.
Полное использование листов, находивщихся в контейнере 17, контролируется датчиком 28, который останавливает устройство. Контейнер 17 заменяют, сни.мая при этом две передних направляющих 18, которые установлены в Т-образных пазах стола и крепятся быстросъемны.м соединением. После замены контейнера 17 направляющие устанавливают обратно, работа устройства продолжается.
Формула изобретения
Устройство для отделения и подачи листов, содержандее смонтированные на неподвижном столе контейнер с начкой листов, подвижный в вертикальной плоскости от приводного вала блок с вакуу.мными захватами и подающие валки, один из которых прижимной, отличающееся тем.- что, с целью иовыщения надежности от.деления листов, оно снабжено установленными на нриводном валу и подпружиненными к нему рычагами, смонтированны.ми на рычагах дополнительными вакуу.мными захвата.ми, периодически контактирующими с отделяе.мы.м листом снизу.с усилием меньшим, чем усилие основных захзатов, закрепленными на столе съемными, вертикальными направляющими, ограничивающи.ми пачку листов по бокам и имеющими высоту, равную длине перемещения блока, а также силовым цилиндром и поворотным от него нееущим прижимной валок рычагом, отводимым при перемещении блока к пачке листов.
Источники информации, принятые во внимание при экспертизе:
. Норицын И. А. и Власов В. И. Автоматизация и механизация технол()1-ических процессов ковки и штамповки. М., 1967, с. 183, рис. 98.
тЫ
ге
м
21 9 24 23 ZZ Jd 20
I
25
Фигл
