Изобретение относится к машиностроению и предназначено, например, для обслуживания токарных станков при обработке деталей типа тел врашения.
Известны автоматизированные технологические единицы, в состав которых входят токарный станок, промышленный робот, коорцинатный стол и системы управления оборудованием и роботом JlJ.
Оцнако в известных устройствах невозможно автоматически переворачивать детали при их патронной обработке, что снижает технологические йозможности оборудования.
Цель изобретения - расширение технологических возможностей устройства,
Указанная цель достигается благодаря тому, что в пиноли задней бабки токарногб станка установлен неподвижно дополнительныГ схват, причем схват выполнен съемным.
На фиг. 1 Ъана автоматизированнаятехнологическая единица, общий вид,
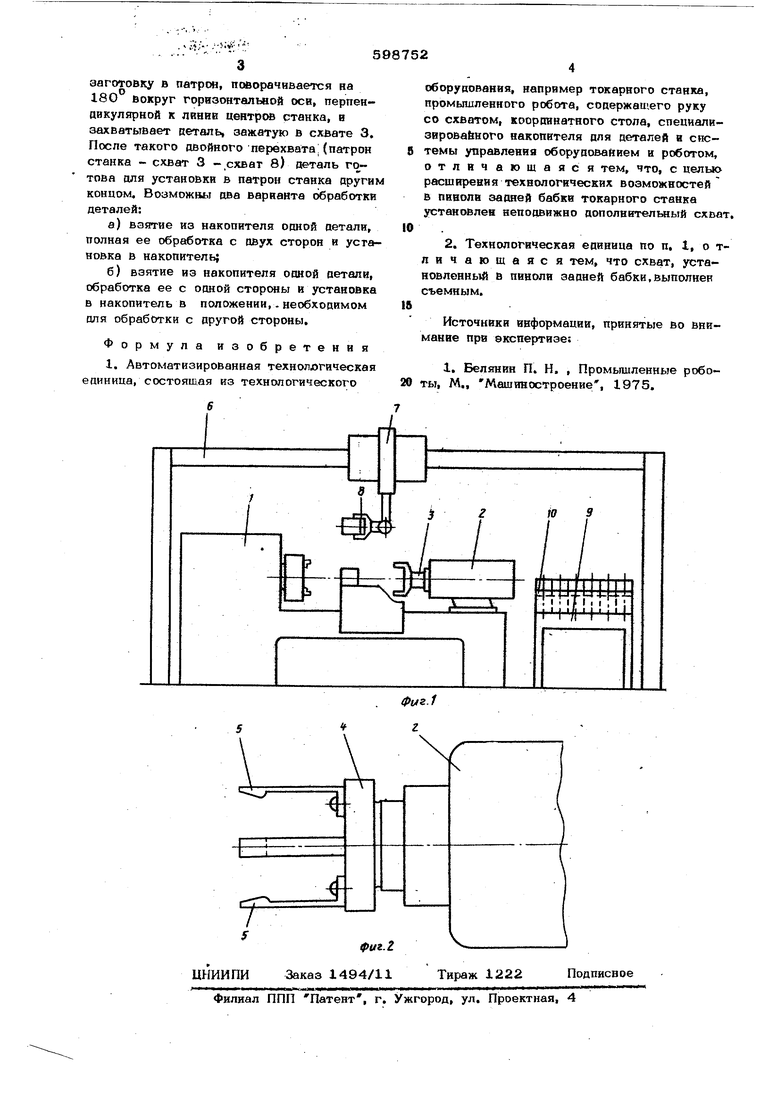
На фиг. 2 - конструктивное выполнение схвата.
Автоматизированная технологическая единица содержит токарный станок 1 с числовым .программным, управлением, в задней бабке 2 которого установлен схват 3, содержащий корпус 4 и губки 5, Корпус 6 промышленного робота выполнен в вице портала, по верхней перекладине которого перемешается рука 7, на конце которой расположен шарнирно закрепленный схват 8
В зоне действия схвата 8 установлен координатный стол 9 с нйкопитблем Ю для деталей (заготовок)./
Автоматизированная технологическая единица работает следующим образом. Первая заготовка из партии устанавливается в патрон станка 1, а вторая в схват 8 руки 7 оператором. Автоматический Цикл начинается с пуска станка в работу. После окончания обработки детали на станке 1 схват 3 выдвигается вперед и захватывает обработанную деталь, зажатую в патроне, кулачки патрона станка расходятся и схват 3 с зажатой обработанной деталью отходит назад в. исходное положение. Рука 7 со схватом 8 опускается вниз до совмещения оси поворота схвата 8 с линией центров станка и схват 8 вставляет следующую
заготовку в патрон, поворачивается на 18О вокруг горизонтальной оси, перпендикулярной к линии центров станка, и захватывает деталь, зажатую в схвате 3. После такого двойного перехвата; (патрон станка - охват 3 - охват 8) деталь го това для установки в патрон станка другим концом. Возможны два варианта обработки деталей:
а)взятие из накопителя одной детали, полная ее обработка с двух сторон и установка в накопитель;
б)взятие из накопителя одной детали, обработка ее с одной стороны и установка в накопитель в положении,. необходимом ОЛЯ обработки с другой стороны.
Формула изобретения
1. Автоматизированная технологическая единица, состоящая из технологического
оборудования, например токарного станка, промышленного робота, содержащего руку со охватом, координатного стола, специализвроваЬного накопителя для деталей и с(ютемы управления оборудованием и роботом, отличающаяся тем, что, с целью расширения технологических возможностей в пиноли задней бабки токарного станка установлен неподвижно дополнительный схват.
10
2. Технологическая единица по п. 1, о тличающаяся тем, что схват, установленный в пиноли задней бабки, выполнен съемным.
Источники информации, принятые во внимание при экспертизе:
1. Белянин П. Н. , Промьплленные робоы, М., Машиностроение, 1975.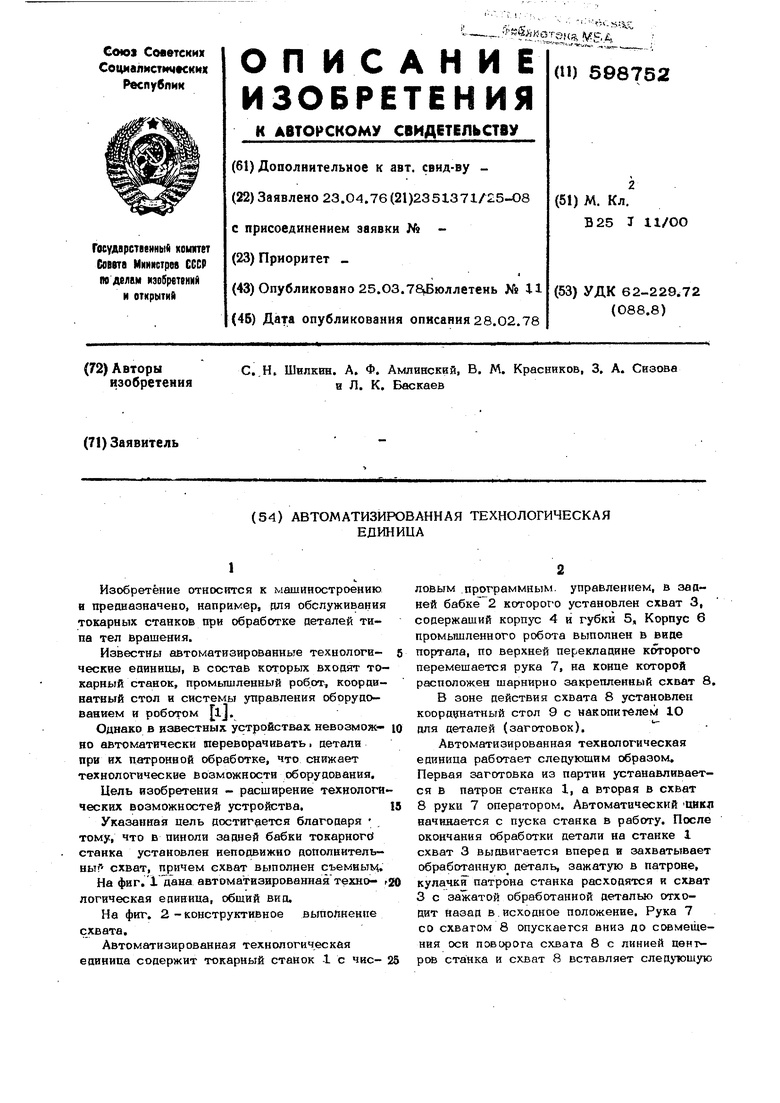
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная технологическая единица | 1977 |
|
SU659375A1 |
| Автоматизированная технологическая единица | 1982 |
|
SU1024269A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1329948A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1430234A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Автоматизированная технологическая единица | 1984 |
|
SU1184658A1 |
| Автоматизированная технологическая единица | 1984 |
|
SU1197818A1 |
| Робототехнический комплекс | 1986 |
|
SU1425036A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
