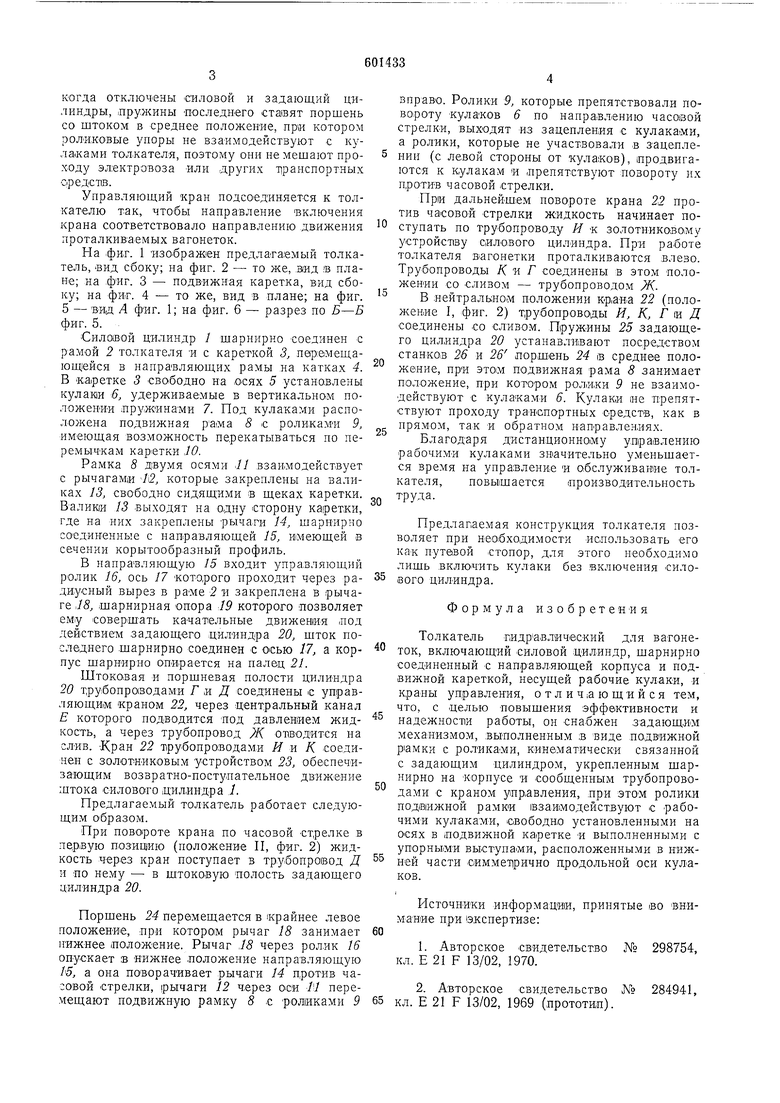
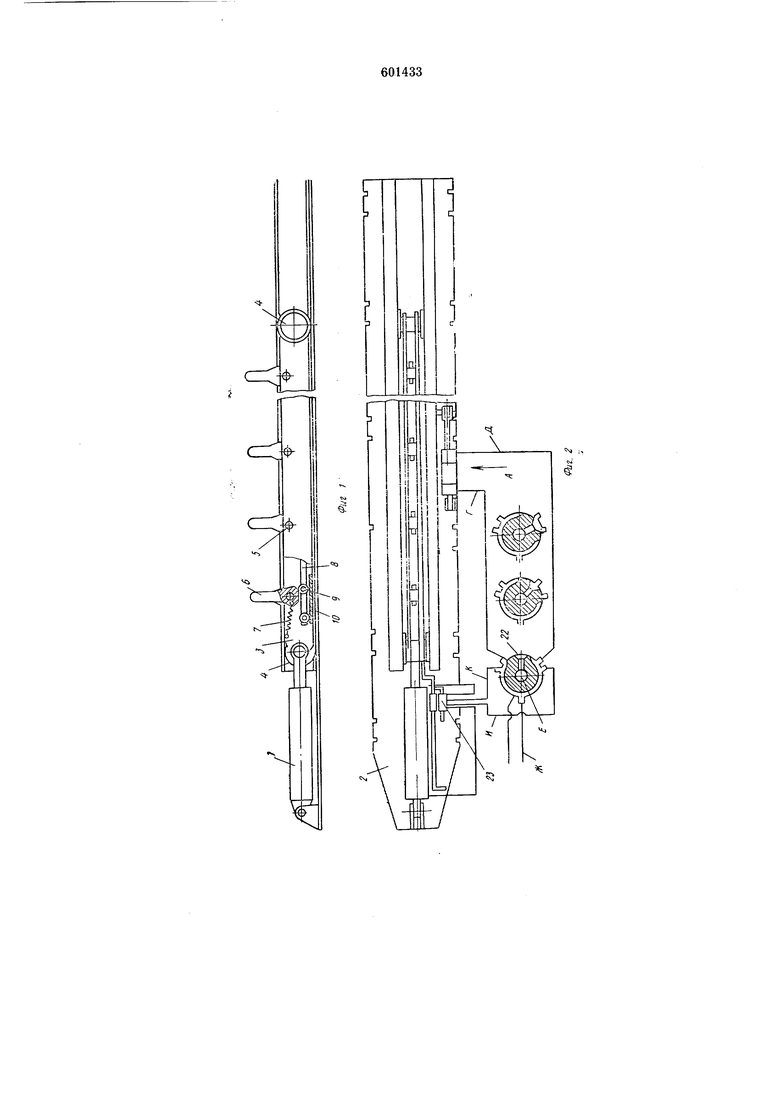
Изобретение относится к области механизации горных работ .и предназначено для проталкивания шахтных вагонето.к в руддворах на (погрузочных эстакадных и других .пунктах. Известен гидравлический толкатель для вагонеток, имеющий ползуны с рабочими кулаками, .связанные между собой гибкой связью, совершающие 1ВОЗВ1ратно-поступательные движения от силовых П|ияиндров 1. Недостаток указанного толкателя - отсутствие дистанционного управления ра,бочи|МИ кулаками, что снижает эффективность его лрнменения. Наиболее близким техническим решением является толкатель пидравлический для вагонеток, включающий силовой цилиндр, щарНирно соединенный с направляющей ко.рцуса и подвижной кареткой, несущей рабочие кулаки, краны управления 2. Недостаток известного толкателя - сложность переключения кулаков в крайних положениях ползуна. Если в этих положениях повороту кулаков будут препятствовать, к примеру, элементы вагонеток, переключения может не произойти. Для беспрепятственного пропуска электровоза кулаки приходится раскладывать, что является трудоемкой операцией, так как для этого нужно вывернуть и переставить упоры всех кулаков. Конструкция устройства не исключает воз-можности самопроизвольного переключения кулаков при попадании породы или других твердых объектов между плунжерными гидроцилиндрами и переключающей планкой. ICpoMe того, при отключении питания силового гидроцилиндра реверсирование кулаков осуществить невозможно. Цель изобретения - повышение эффективности « надежности работы толкателя путем дистанционного управления направлением действия толкающих кулаков. Указанная цель достигается тем, что устройство снабжено задающим механизмом, выполненным в виде подвижной рамки с роликами, кинематически связанной с задающим -цилиндром, укрепленным щарнирно на KOipnycc и сообщенным трубопроводами с краном управления, при это.м ролики подвижной рамки взаимодействуют с рабочими кулаками, свободно установленными на осях в подвижной каретке и выполненными с упорными выступами, расположенными в нижней части симметрично продольной оси кулаков. Подобное выполнение устройства повышает эффективность его работы, так как позволяет реверсировать кулаки толкателя при любом положении подвижной каретки и независимо от силового цилиндра толкателя. В нейтральном положении управляющего крана. когда отключены силовой и задающий цилиндры, пружины последнего ставят поршень со штоком в среднее положение, при котором ролЯковые упоры не взаимодействуют с кулаками тол.кателя, поэтому они ие мешают проходу электровоза «ли других Т1раиспортных средств. Управляюш,ий кран подсоединяется к толкателю так, чтобы направление включения крана соответствовало направлению движения проталкиваемых вагонеток. На .фиг. 1 изОбражен предлагаемый толкатель, -вид сбоку; на ф.иг. 2 - то же, вид ,в плане; на фиг. 3 - подвижная каретка, вид сбоку; на фиг. 4 - то же, вид в плане; на фиг. 5 -вид А ФИГ. 1; на фиг. б - разрез по Б-Б фиг. 5. Силовой цилиндр / шарнирно соединен с рамой 2 толкателя и с кареткой 3, перемещающейся в направляющих рамы на катках 4. В каретке 3 свободно на осях 5 установлены кулак1и 6, удерживаемые в вертикальном положении пружинами 7. Под кулаками расположена подвижная рама 8 с роликами 9, имеющая возможность перекатываться по перемычкам каретки ,10. Рамка 8 двумя осями -11 взаимодействует с рычагами -12, которые закреплены на валиках 13, свободно сидящими в щеках каретки. Валиюи 13 выходят на одну сторону каретки, где на них закреплены рычаги 14, шарнирно соединенные с направляющей 15, имеющей в сечении корытообразный профиль. В направляющую 15 входит управляющий ролик 16, ось 17 которого проходит через радиусный вырез в раме 2 и закреплена в рычаге 1/5, шарнирная опора 19 которого позволяет ему 1совершать качательные движения «под действием задающего цилиндра 20, шток последнего щарнирно соединен с осью 17, а корпус шарнирно опирается на палец 21. Штоковая и поршневая полости цилиндра 20 трубопр0|водами Г и Д соединены ic управляющим краном 22, через центральный канал Е которого подводится под давлением жидкость, а через трубопровод Ж от1водится иа слив. Кран 22 трубопроводами И и К соединен с золотниковым устройством 23, обеспечивающим возвратно-поступательное движение штока силового |ЦИл,индра 1. Предлагаемый толкатель работает следующим образом. При повороте крана по часовой стрелке в первую позицию (положение П, фиг. 2) жидкость через кран поступает в трубопровод Д и по нему - в щтоковую полость задающего цилиндра 20. Поршень 24 перемещается в крайнее левое положение, при котором рычаг 18 занимает нижнее положение. Рычаг ,18 через ролик 16 опускает в нижнее положение направляющую 15, а она поворачивает рычаги 14 против часовой стрелки, рычаги 12 через оси // перемещают подвижную рамку 8 с роликами 9 вправо. Ролики 9, которые препятствовали повороту кулаков 6 по направлению часовой стрелки, выходят из зацепления с кулаками, а ролики, которые не участвовали в зацеплении (с левой стороны от кулаков), продвигаются к кулакам и препятствуют повороту их против часовой стрелки. При дальнейшем повороте крана 22 против часовой стрелки жидкость начинает поступать по трубопроводу И -к золотниковому устройству силового цилиндра. При работе толкателя в агонетки проталкиваются влево. Трубопроводы К П Г соединены в этом положении со сливом - трубопроводом Ж. В яейтральяом положении 22 (положение I, фиг. 2) трубопроводы И, К, Г и Д соединены со сливом. Пружины 25 задающего цилиндра 20 устанавливают посредством станков 26 и 26 поршень 24 в среднее положение, при этом подвижная рама 5 занимает положение, при котором ролики 9 не взаимодействуют с кулаками 6. Кулаки не препятствуют проходу транспортных средств, как в прямом, так и обратном направлениях. Благодаря дистанционному управлению рабочими кулаками значительно уменьшается время на управление и обслуживание толкателя, повышается производительность труда. Предлагаемая конструкция толкателя позволяет при необходимости использовать его как путевой iCTonop, для этого пеобходимо лишь включить кулаки без включения силового цилиндра. Формула изобретения Толкатель гидравлический для вагонеток, включающий силовой цилиндр, щарнирно соединенный с направляющей корпуса и подвижной кареткой, несущей рабочие кулаки, и краны управления, отличающийся тем, что, с целью повышения эффективности и надежности работы, он снабжен задающим механизмом, выполненным в виде подвижной piaMKH с роликами, кинематически связанной с задающим цилиндром, укрепленным щарнирно на корпусе и сообщенным трубопроводами с краном управления, при этом ролики подвижной рамки взаимодействуют с рабочими кулаками, свободно установленными на осях в подвижной каретке и выполненными с упорными выступами, расположенными в нижней части симметрично продольной оси кулаков. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство № 298754, кл. Е 21 F 13/02, 1970. 2.Авторское свидетельство № 284941, кл. Е 21 F 13/02, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ЗАГРУЗКОЙ И ОБМЕНОМ ВАГОНЕТОК | 1972 |
|
SU335420A1 |
| Гидравлический толкатель для проталкивания состава вагонеток | 1982 |
|
SU1146475A1 |
| СТОПОР-ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1970 |
|
SU283534A1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| Ю. И. Плотников, М. И. Килин и Е. М. Чернявский | 1970 |
|
SU284941A1 |
| Толкатель для перемещения вагонеток | 1979 |
|
SU879232A1 |
| Толкатель шахтных вагонеток | 1981 |
|
SU1011868A1 |
| ГИДРАВЛИЧЕСКИЙ ТОЛКАТЕЛЬ | 1969 |
|
SU241369A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| КАНАТНЫЙ ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1969 |
|
SU232902A1 |

S-6
