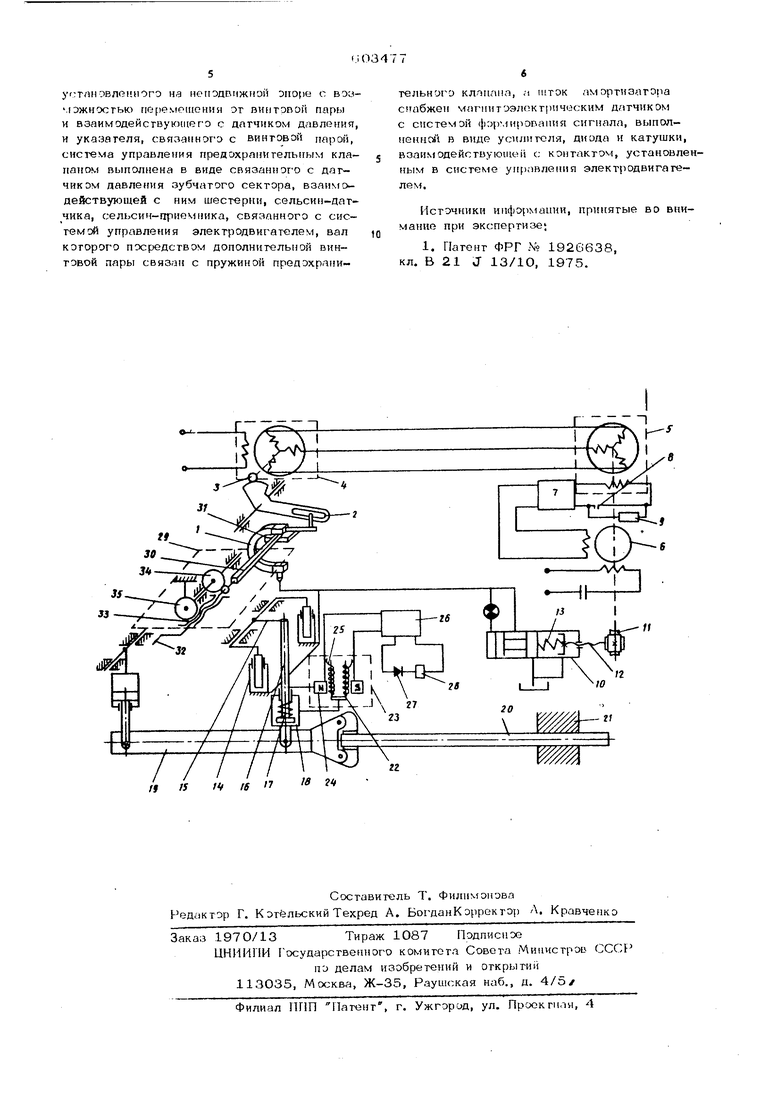
пр .дохрацигельного клапана 10 no i-pyaoBOму моменту or веса слигка. Электродвит-апзль 6 через червз чную пару 11 и винтовую пару 12 связан с гц)ужииой 13 предох)анительного клапана 10, соедиг енного с цилиндрами подъема 14, на которых посреаством рычагов 15, штока 16 и амортизатора 17, заключенного в корпус 18, подвешен хобот 19 с поковкой 20, деформируе мой бойками 21. К корпусу 18 амортизатора 17 прикреп. лена подвижная часть 22 магнитоэлектрического датчика 23. Неподвижная часть24 магнитоэлектрического датчика 23 закреплена на штоке 16 амортизатора 17. Подвижная часть 22 магнитоэлектрического датчика 23 посредством ко1 тактов 25 и ycилv тeля 26 связана с Диодом 27 и катушкой 28 управления контактом 8 в цепи управления электродвигателем 6. Датчик давления 1 связан с механизмо 29 предварительной настройки предохранительного клапана, выполненным в виде клина 30, расположенного между неподвижной апорой 31 и еерхпей частью датчика давлеПИЯ 1. Клип 30 поремешнют при помощи ручки 32 и винтовой пары 33, кинематичес ки связанной через забчатую пару 34 с диском указателя 35, При деформации поковки 20 бойками 21 она ПОсла каждого нажима бойками удлиняется вдоль оси хобота 19 и вызывает увеличение грузового момента и ссютветственно давления жидкости в цилиндрах подъема 14. При этом датчик давления 1 удлиняется и поворачивает зубчатый сектор 2, который вращает шестерню 3 на валу сельсин-датчика 4. Сельсинf-датчик 4 соединен с сельсин-приемником 5 по трансформаторной схеме, поэтому в сельсин-прие нике при удлинении датчика 1 возникает сигнал рассогласования. Сигнал рассогласования усиливается уси лителем ,7 и поступает в цепь управления электродвигателем 6, который вращает не только вал сельсин-приемника, но и червячную 11 и винтовую 12 пары, сжимая пружи ну 13 предохранительного клапана 10 до тех пор,пока сигнал рассогласования не ста нет равным нулю. При этом предохранительный клапан 10 оказывается настроенным с некоторым запасом на давление, соответств ющее определенному грузовому моменту от веса повозки 20 с хоботом 19. Благодаря наличию магнитоэлектрического датчика 23 со схемой формирования сигнала, состоящей из усилителя 26, диода 27 и катушки 28, следящая система настройки (предохранительного клапана 10 автоматически срабатывает только при п:,Дьоч)о хобота 19 с; поковкой 2О вверх пэд действиек1 амортизатора 17. нодъеNie хобо га 19 с поковкой 20 сигнал от магнитоэлектрического датчика 23 усиливается усилителем 26 и проходит через диод 27 и катушку 28, которая замыкает контакт 8 в цепи управления электродвигателем 6, При сжатии поковки 20 бойками 21 амортизатор 17 сжимается и следящая система автоматической настройки предохрани- 1«льного клапана 10 отключается, так как сигнал От магнитоэлектрического датчика 23 изменяет полярность; катушка 28 благодаря наличию диода 27 обесточивается и контакт 8 в цепи управления электродвигателем 6 размыкается. Предохранительный клапан 10 остается настроенным на определенное давление. При дальнейшем движении поковки 20 вниз под действием верхнего бойка 21 нагрузка на амортизатор 17 увеличивается, давление а цилиндрах подъема 14 повышается, в результате чего предохранительный клапан срабатывает при определенном приращении грузового момента, предохраняя подвеску от нарастающих усилий за счет перемещения плунжеров в цилиндрах подъема 14. При подъеме верхнего бойка 21 поковка поддействием амортизатора 17 поднимается, магнитоэлектрический датчик 23 включает следящую систему автоматической настрсйки предохранительного клапана 10, работа которой описана ранее. Перед захватом клещами манипулятора нового спитка определенного веса машинист манипулятора при помощи ручки управления 32, винтовой пары 33, клина 30 и датчика давления 1 вводит данные для настройки предохранительного клапана 10, замыкая при соответствующем показании указателя 35 кнопку 9 в цепи управления электродвигателем 6. Формула иаоб ре гения Передняя подвеска хобота кузнечного манипулятора, содержащая силовые цилиндры, связанные рычагами с хоботом манипулятора, амортизатор со штоком, датчик давления, предохранительный клапан и систему управления предохрани хэльным клапаном, отличающаяся тем, что, с целью повышения ее надежности в работе путем обеспечения возможности автоматической настройки предохранительного клапана в зависимости от величины грузового гомента поковки, она снабжена механизмам предварительной настройки предохраннтел1 ного клапана, выполн чным в виде клина.
уг:т чмовло1 ного на неподвижной опоре с воаможносгью перемошоння от виятопой пары и взаимодействующего с датчиком давления, и указателя, связанного с винтовой парой, cHci-evia управления предохрянительным клаnaitOM выполнена в виде свнзаннотО с датчиком давления зубчатого сектора, взаимодействующей с FiHM шестерни, сельсии-дат чика, сельсин-приемника, связанного с системой управления электродвигателем, вал которого посредством дополнительной винтовой пары связан с пружиной предохранительного кллнана, а шток амортизатора снабжен магнитоэлектрическим датчиком с системой (|10рми 1Ования сигнала, выполненной в виде усилителя, диода и катушки, воаимодействуюше с; контактом, установленым в системе у1гр)авления электродвигателем.
Источники ипформании, принятые во внимание при экспертизе;
1. Патент ФРГ № 1926638, кл. В 21 J 13/10, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство вертикальной амортизации хобота ковочного манипулятора | 1987 |
|
SU1516216A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Устройство вертикальной амортизации хобота манипулятора | 1976 |
|
SU607634A1 |
| Ковочный агрегат | 1978 |
|
SU810353A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| УСТРОЙСТВО для ПОДЪЕМА ХОБОТА КУЗНЕЧНОГО МАНИПУЛЯТОРА | 1972 |
|
SU351626A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| Ковочный манипулятор | 1980 |
|
SU893385A1 |
| Манипулятор | 1979 |
|
SU812412A1 |
7УТ77 ft IS f fS If
