Изобретение относится к машиностроению и может быть использовано для автоматизации технологических процессов производства.
Цель изобретения - повышение точности позиционирования руки робота за счет регулирования скорости истечения рабочего тела из силового пневмоцилиндра.
На фиг. 1 показана схема робота; на фиг. 2 - конструкция силового цилиндра перемещения робота.
Промышленный робот включает основание 1, пневмоцилиндр 2, поворотную колонну 3, установленную на основании 1. На колонне 3 расположена рука 4 робота, выполненная в виде пневмоцилиндров и снабженная захватами 5. Зубчатое колесо 6 взаимодействует с зубчатой рейкой 7, установленной на неподвижном основании 8. Шток-рейка 9 пневмоцилиндра 2 враш,ает зубчатое колесо 10, расположенное на одном валу с колесом 6. Воздух из цеховой сети в силовой цилиндр 2 поступает по трубопроводам, 11, а сброс его происходит через отверстия 12, соединяющие полости пневмоцилиндра 2 с гибкими трубопроводами 13, которые жестко закреплены на валке 14. Подвижный валок 14 имеет профильную поверхность для размещения гибкого трубопровода 13 и зубчатую - для взаимодействия с рейкой 15. Поверхность рейки 15, расположенная над навиваемым гибким трубопроводом 13, имеет клиновую поверхность. Валок 14 установлен на подвижной каретке 16.
Устройство работает следующим образом.
Сжатый воздух по трубопроводам 11 поступает в поршневую полость пневмоцилиндра 2 и перемещает рейку 9, которая, взаимодействуя с зубчатым колесом
«
Фиг. f
Составитель А. Уваров
Техред И. ВересКорректор .4. Обручар
Тираж 952Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Л1осква, Ж--35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Редактор М. Петрова Заказ 5465/17
10, через колесо 6 осуществляет перемещение основания 1 робота вдоль зубчатой рейки 7, закрепленной на неподвижном основании 8. При поступлении сигнала на остановку робота прекращается подача воздуха в полость цилиндра 2 и открывается выход воздуха в атмосферу через гибкие трубопроводы 13. Для регулировки сопротивления истечению воздуха из цилиндра каретку 16 с помощью реечной передачи перемещают вправо или влево. При движении зубчатой рейки 15 влево гибкий отводной трубопровод 13 наматывается на валок 14 и изменяет сопротивление истечению воздуха из цилиндра. Более интенсивное сопротивление истечению воздуха из цилиндра производят деформированием гибких трубопроводов клиновой поверхностью зубчатой рейки 15, а каретка 16 перемещается на ход рейки 15.
20
Формула изобретения
Промыщленный робот, содержащий корпус, гибкие трубопроводы, подводящие рабочее тело к одной полости силового пневмоцилиндра, щток которого кинематичес- 5 ки связан с рукой робота, отличающийся тем, что, с целью повыщения точности позиционирования руки робота за счет регулирования скорости истечения рабочего тела из силового пневмоцилиндра, вторая полость силового пневмоцилиндра связана с атмос- ферой посредством дополнительных гибких трубопроводов, а на корпусе с возможностью перемещения относительно него установлен дополнительно введенный валковый механизм обжатия, BHJEKH которого взаимодействуют с дополнительными гибкими трубопроводами.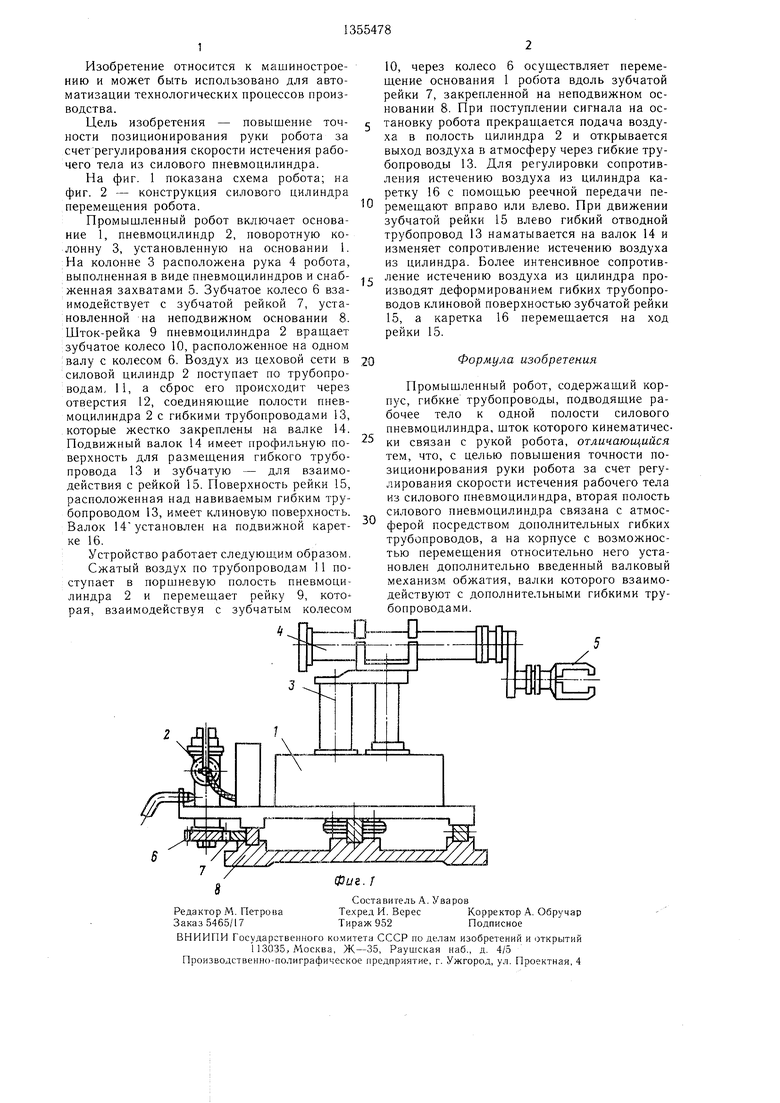
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1984 |
|
SU1199614A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Автооператор | 1987 |
|
SU1465249A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Промышленный робот | 1984 |
|
SU1684019A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Промышленный робот | 1976 |
|
SU603577A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1163943A1 |
Изобретение относится к машиностроению и может быть использовано для автоматизации технологических процессов производства. Целью изобретения является повышение точности позиционирования руки робота за счет регулирования скорости истечения рабочего тела из силового пневмо- цилиндра. Сжатый воздух по трубопроводам 11 поступает в полость пневмоцилинд- ра и перемешает рейку 9, которая, взаимодействуя с зубчатым колесом 10, через второе зубчатое колесо осушествляет пере- меш,ение руки робота. При поступлении сигнала на остановку робота прекращается подача воздуха в полость пневмоцилиндра и открывается выход воздуха в атмосферу через отверстия 12 и гибкие трубопроводы 13. Для регулировки сопротивления истечению воздуха из пневмоцилиндра каретку 16 с помош,ью зубчатой рейки 15 перемешают вправо или влево. При этом гибкий трубопровод 13 наматывается на валок 14. Более интенсивное регулирование производят деформированием гибких трубопроводов клиновой поверхностью зубчатой рейки 15. 2 ил. СО СЛ СП 4 оо физ. 2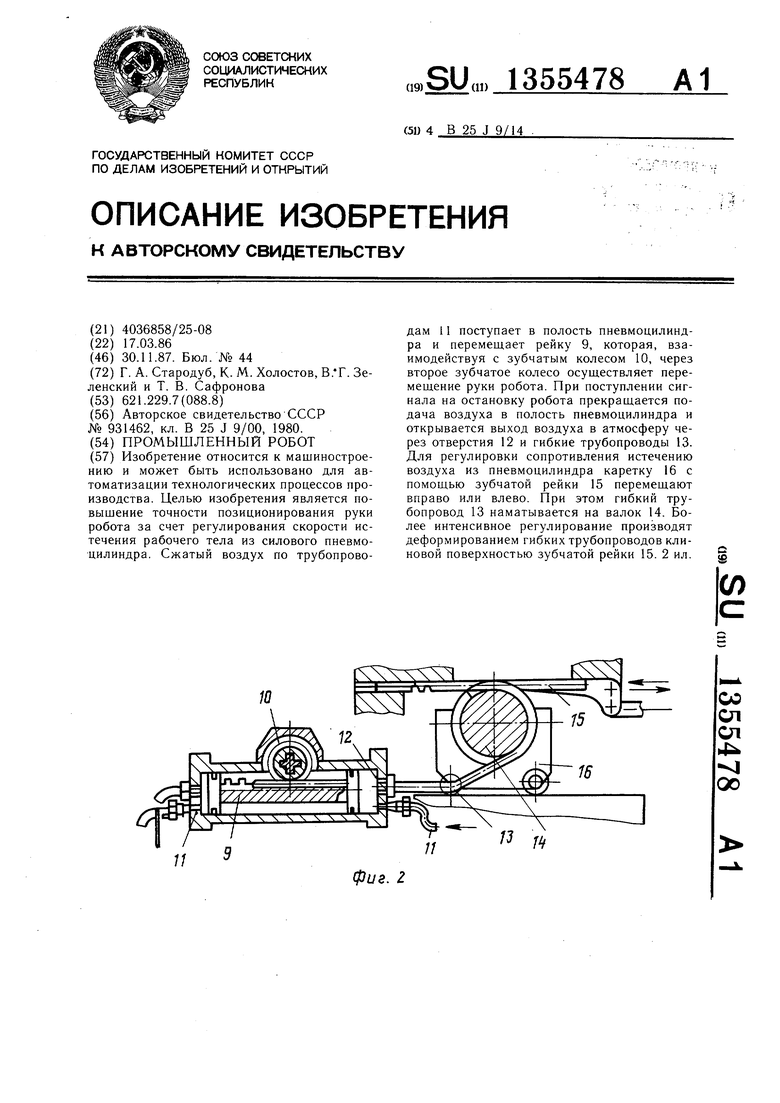
| Промышленный робот | 1980 |
|
SU931462A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
