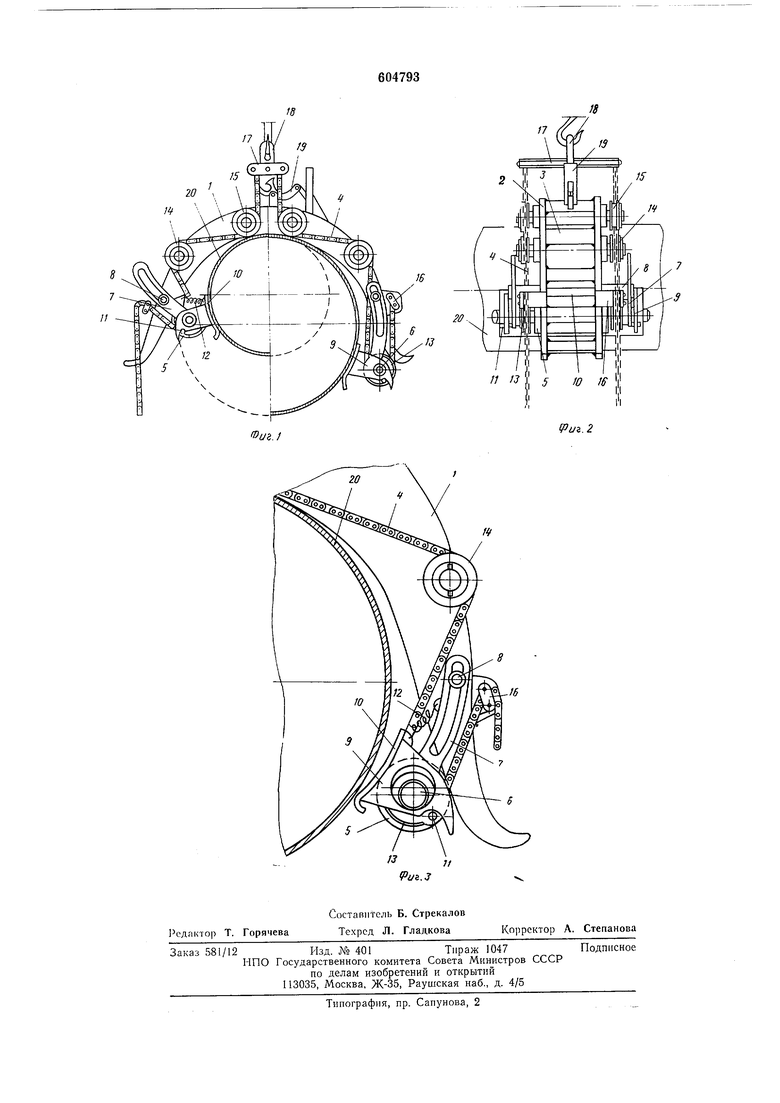
с рамой 1 для их автоматического расцепления при необходимости обжать трубу захватом, натягивая цепи 4, служит автоматический фиксатор 19. Конфигурация внутренней поверхности ребер 2 выполнена таким образом, что вместе с наружной поверхностью захватываемой трубы 20 она образует по обе стороны трубы клинообразные пространства, а размер роликов 5 с захватными лапами 10 (диаметр ролика и толщина пластины) выбран таким образом, что ролики 5 при захвате трубы любого проектного диаметра заклинивались ниже оси трубы.
Универсальный захват для труб работает следующим образом.
При закрытом автоматическом фиксаторе
19траверса 17 сцеплена с рамой 1. В таком положении за скобу 18 захват цепляется иа крюк грузоподъемного устройства и транспортируется к трубе. Ролики 5 в этом случае под собствеппым весом, выбирая слабину роликовых цепей 4, зависают в самом нижнем положении. При опускании захвата на трубу
20свободно подвещенные ролики 5 вместе с захватными лапами 10 разжимаются трубой, захват несущей рамой 1 ложится на трубу 20. Траверса 17 опускается полностью на трубу и снова поднимается, за счет чего автоматический фиксатор открывается и траверса 17 начинает натягивать цепи 4.
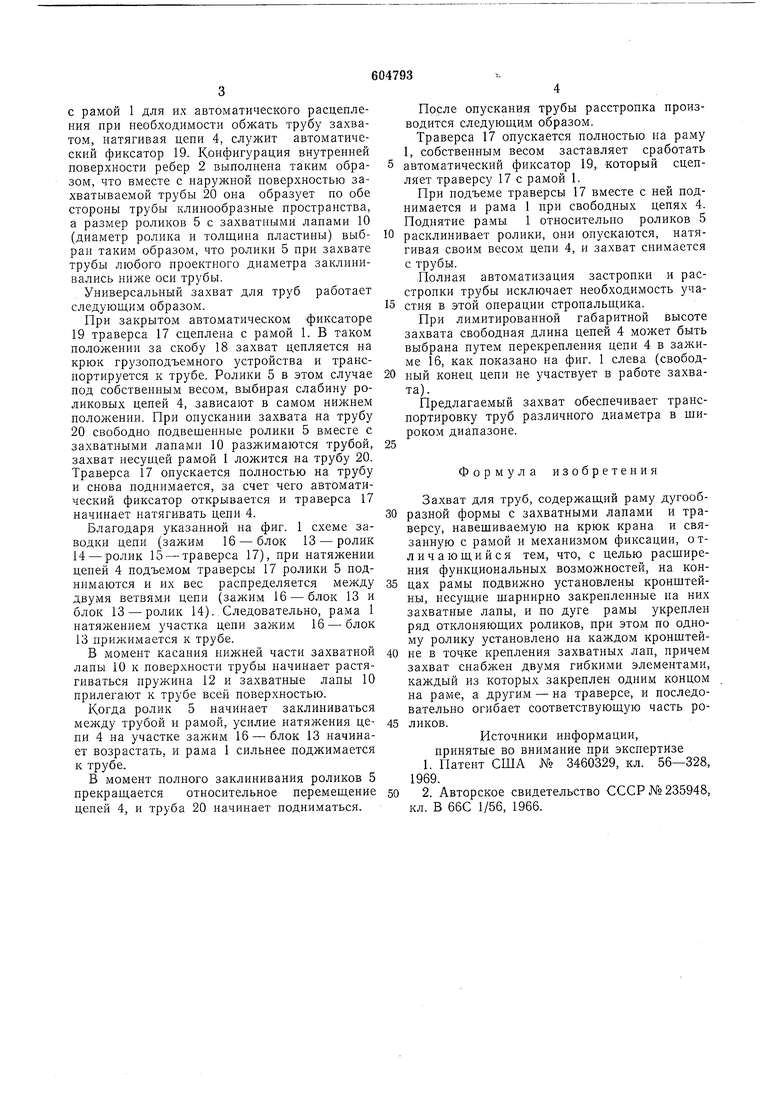
Благодаря указанной на фиг. 1 схеме заводки цепи (зажим 16 - блок 13 - ролик 14 - ролик 15 - траверса 17), при натяжении цепей 4 подъемом траверсы 17 ролики 5 поднимаются и их вес распределяется между двумя ветвями цепи (зажим 16 - блок 13 и блок 13 - ролик 14). Следовательно, рама 1 патял :ением участка цепи зажим 16 - блок 13 прижимается к трубе.
В момент касания нижней части захватной лапы 10 к поверхности трубы начинает растягиваться пружина 12 и захватные лапы 10 прилегают к трубе всей поверхностью.
Когда ролик 5 начинает заклиниваться между трубой и рамой, усилие натяжения цепи 4 на участке зажим 16 - блок 13 начинает возрастать, и рама 1 сильнее поджимается к трубе.
В момент полного заклинивания роликов 5 прекращается относительное перемещение цепей 4, и труба 20 начинает подниматься.
После опускания трубы расстройка производится следующим образом.
Траверса 17 опускается полностью на раму 1, собственным весом заставляет сработать автоматический фиксатор 19, который сцепляет траверсу 17 с рамой 1.
При подъеме траверсы 17 вместе с ней поднимается и рама 1 при свободных цепях 4. Поднятие рамы 1 относительно роликов 5 расклинивает ролики, они опускаются, натягивая своим весом цепи 4, и захват снимается с трубы.
Полная автоматизация застройки и расстропки трубы исключает необходимость участия в этой операции стропальщика.
При лимитированной габаритной высоте захвата свободная длина цепей 4 может быть выбрана путем перекрепления цепи 4 в зажиме 16, как показано на фиг. 1 слева (свободпый конец цепи не участвует в работе захвата).
Предлагаемый захват обеспечивает транспортировку труб различного диаметра в щироком диапазоне.
Формула изобретения
Захват для труб, содержащий раму дугообразной формы с захватными лапами и траверсу, навешиваемую на крюк крана и связанную с рамой и механизмом фиксации, отличающийся тем, что, с целью расщирения функциональных возможностей, на концах рамы подвижно установлены кронщтейны, несущие шарнирно закрепленные на них захватные лапы, и по дуге рамы укреплен ряд отклоняющих роликов, при этом по одному ролику установлено на каждом кронщтейне в точке крепления захватных лап, причем захват спабжен двумя гибкими элементами, каждый из которых закреплен одним концом на раме, а другим - на траверсе, и последовательно огибает соответствующую часть роликов.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3460329, кл. 56-328, 1969.
2. Авторское свидетельство СССР № 235948, кл. В 66С 1/56, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Захват-кантователь | 1989 |
|
SU1726358A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захватное устройство | 1987 |
|
SU1493582A1 |
| Грузозахватное устройство | 1978 |
|
SU747803A1 |
| Автоматическое грузозахватное устройство | 1986 |
|
SU1373684A1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |