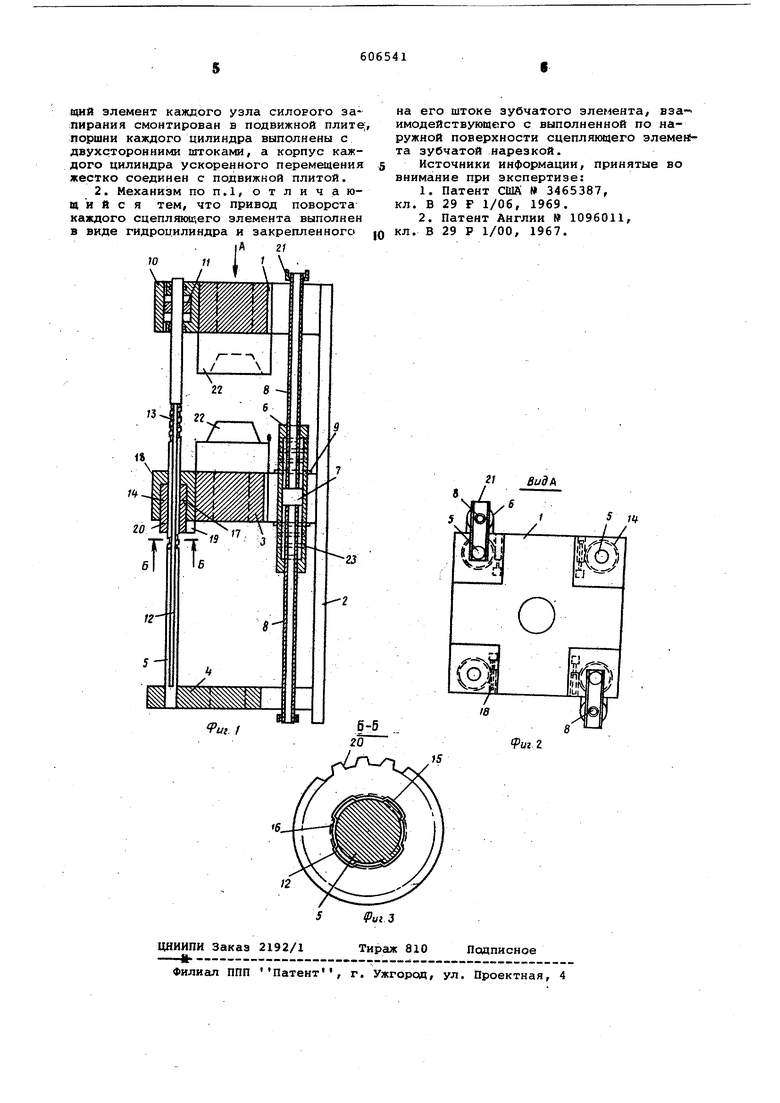
На фиг. 1 показан предлагаемый механизм, общий вид; на фиг. 2 - вид А фиг. 1; на фиг. 3 - разрез Б-Б фиг. Механизм замыкания состоит из неподвижной плиты 1, жестко соединенной с направляющей 2 станины (условно не показана), подвижной плиты 3 и плиты жесткости 4, связанных между собой колоннами 5, цилиндров ускоренного пе ремещения 6 с поршнями 7, разма11енными на трубчатом элементе 8, жестко соединенных с подвижной плитой 3 при помощи съемных кольцевых шпонок 9 и снабженных каналами для подвода гидравлической жидкости, дополнительных УЗЛОВ силового запирания со средствами подачи гидравлической жидкости, размещенных по периметру неподвижной плиты 1 и подвижной плиты 3 и выполненных в виде силовых цилиндров 10, размещенных в неподвижной плите 1 с поршнями 11, жестко соединенными с ко лоннами 5 с образованием двухстороннего штока и связанными с подвижной плитой 3 через кЬлонны 5, снабженные продольными ребрами 12 и винтовой нарезкой 13 по наружной поверхности, и сцепляющих элементов 14, имеющих соответственно продольные пазы 15 и рез бу 16,выполненные по внутренней поверхности сцепляющего элемента 14, и установленных по наружной винтовой нарезке 17 в подвижной плите 3, приводов поворота каждого сцепляющего элемента 14, выполненных в виде гидроцилиндра 18 и закрепленного на его штоке зубчатого элемента 19, взаимодействующего с выполненной по наружной поверхности -сцепляющего элемента 14 зубчатой нарезкой 20, кронштейнов 21, соединяющих концы трубчатого элемента 8 цилиндра ускоренного перемещения 6 и колонны 5, и полуформ 22 установленных соответственно на непод вижной и подвижных плитах 1 и 3. Съемные кольцевые шпонки У для фик сации положения цилиндра ускоренного перемещения 6 относительно подвижной плиты 3 установлены в кольцевых шпоночных пазах 23, распределенных по наружной поверхности цилиндра 6 с шагом, равным шагу винтовой нарезки 13 колонны 5 или числу кратному ему. Предлагаемый механизм замыкания работает следующим образом. Перемещение подвижной плиты 3 с полуформой 22 по колоннам 5 в сторону неподвижной плиты 1 осуществляется п дачей жидкости через трубчатый элемент В в верхнюю полость ускоренного перемещения 6. При этом сцепляюсоий элемент 14 и нарезная часть колонны находятся в расцепленном положении,: при котором продольные ребра 12 коло ны 5 совпадают с продольными пазами сцепляющего элемента 14. Ход подвиж ,ной плиты 3 до момента смыкания пслу орм 22, определяется положением пли-i ы 3 относительно цилиндров ускореного перемещения 6 и регулируется кол)ьевыми шпоночными пазами 23, распрееленными с шагом, равным шагу винтовой нарезки 13 по наружной поверхноти цилиндра 6. После смыкания полуформ 22 привоятся в действие гидроцилиндры 18, которые поворачивают сцепляющие элементы 14 и обеспечивают их зацепление с колоннами 5. Затем в нижние штоковые полости силовых цилиндров 10 подается гидравлическая жидкость под большим давлением, при этом жестко соединенные между собой подвижная плита 3 с сцепляющим элементом 14, колонны 5 и цилиндр ускоренного перемещения 6 до- . волнительно перемещаются в сторону не-подвижной алиты 1 и, таким образом, происходит запирание полуформ 22. Для размыкания полуформ 22 после окончания процесса формования изделия в верхние штоковые полости силовых цилиндров 10 подается гидравлическая жидкость, а нижняя полость соединяетсзя со сливом, при этом подвижная плита 3 отжимается от неподвижной плиты 1. Ход отжима подвижной плиты 3 регулируется конечным выключателем (на чертеже .не показан). Затем приводятся в действие гидроцилиндры 18 и сцепляющие элементы 14 выходят из зацепления с колоннами 5. Ускоренный отвод подвижной плиты 3 с полуформой 22 осуществляется подачей гидравлической жидкости в нижнюю полость цилиндров ускоренного перемещения 6 через трубчатые элементы 8. Таким образом, предлагаемая констгрукцкя механизма замыкания обеспечивает по сравнению с известными повышение производительности механизма и высокое усилие запирания при мальЬс габаритах силовых цилиндров. Формула изобретения 1. Механизм замыкания форм литьевой машины для пластмасс, содержаЕций закрепленную на станине неподвижную плиту, подвижную плиту, цилиндры ускоренного перемещения подвижной плиты и узел силового запирания форм, выполненный в виде цилиндра, корпус которого закреплен на станине, а поршень связан с подвижной плитой колонной с продольными ребрами по наружной поверхности и винтовой резьбой, соот-; ветствующими продольным пазам и резьбе, выполненным по внутренней поверхности поворотного сцепляющего элемента, отличающийся тем, что, с целью повышения производительности механизма, он снабжен дополнительными узлами силового запирания, размещенными по периметру подвижной и неподвижной плит, при этом сцепляю
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм запирания полуформ литьевой машины | 1974 |
|
SU960036A1 |
| Механизм запирания форм литьевой машины для полимеров | 1978 |
|
SU770822A1 |
| Литьевая машина | 1973 |
|
SU729079A1 |
| Машина для литья под давлениемАРМиРОВАННыХ издЕлий | 1979 |
|
SU821176A1 |
| Механизм запирания полуформ литьевой машины | 1977 |
|
SU668178A1 |
| Механизм запирания литьевой машины | 1986 |
|
SU1353636A1 |
| Машина для литья под давлением | 1973 |
|
SU445516A1 |
| Механизм смыкания форм литьевой машины | 1987 |
|
SU1407822A1 |
| Механизм запирания форм литьевойМАшиНы для пОлиМЕРОВ | 1979 |
|
SU802061A1 |
| Механизм запирания машины литья под давлением | 1980 |
|
SU1287975A1 |
